|
762| 7
|
[项目] 【花雕动手做】远程控制四路电机Romeo ESP32-S3开发控制板 |
|
Romeo ESP32-S3简介 Romeo ESP32-S3开发板是专为机器人项目设计的高性能开发板。该开发板搭载了ESP32-S3-WROOM-1U-N16R8模组,为机器人项目提供强大的计算能力和无线通讯功能。同时,Romeo ESP32-S3还配备了4路2.5A直流电机驱动,无需额外添加电机驱动板即可轻松制作机器人项目。 该开发板配备了一颗高品质的OV2640摄像头,拥有200万像素和68°视场角,支持最高1600*1200分辨率,为机器人提供了视觉输入设备。 ESP32-S3-WROOM-1U-N16R8模组内置16MB Flash和8MB PSRAM,可存储更多代码和数据。其搭载的ESP32-S3芯片具备强大的神经网络运算和信号处理能力,使机器人更加智能。 Romeo ESP32-S3支持Wi-Fi和Bluetooth 5 (LE)双模通讯,可实现无线控制机器人和图像传输的功能。 可以在Arduino IDE、ESP-IDF、MicroPython等环境下对Romeo ESP32-S3进行编程,C语言、python都可以轻松的操纵硬件。 注意:烧录代码前,请按住BOOT,点击复位按键,然后松开BOOT使开发板进入下载模式。 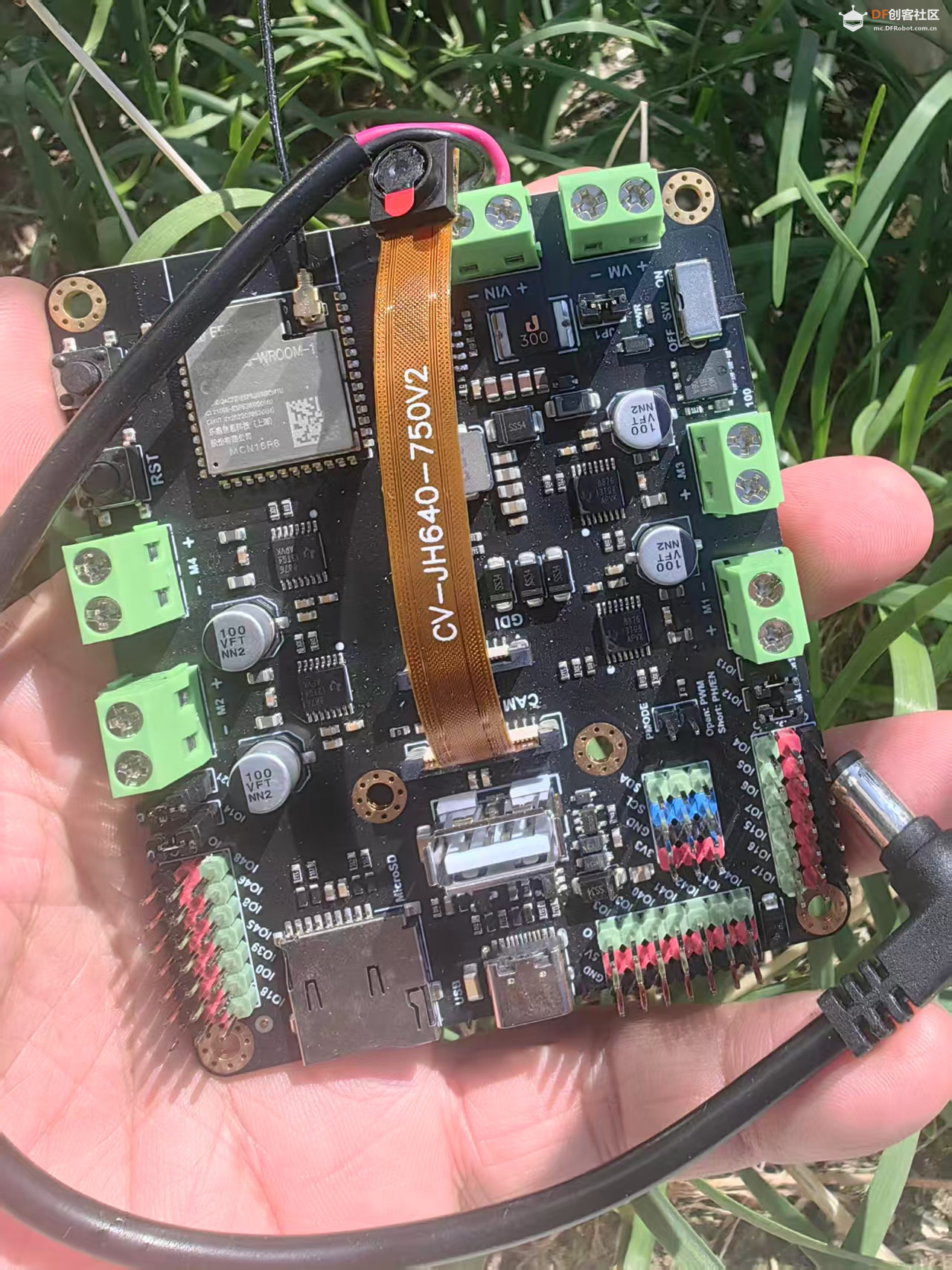 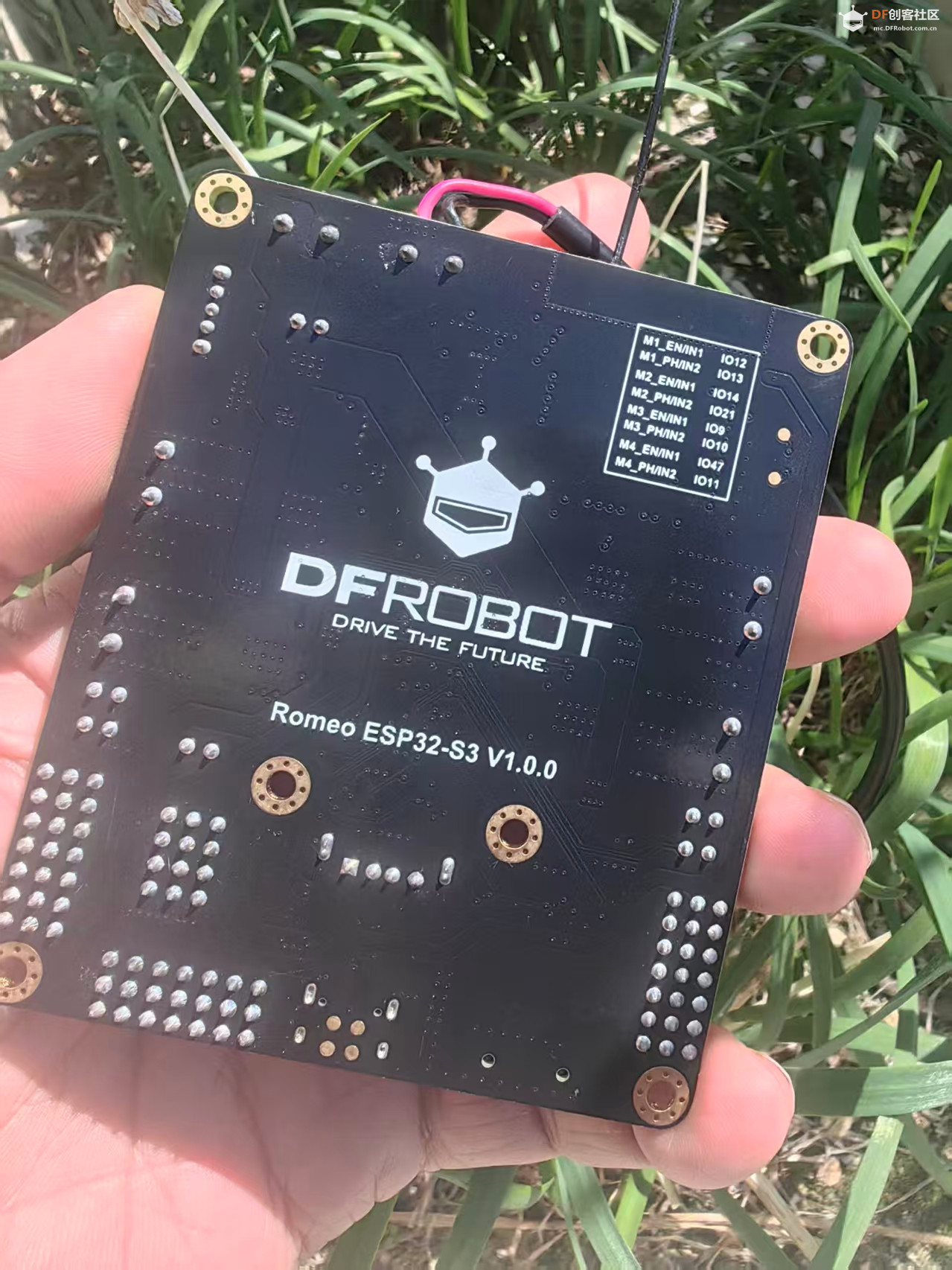 |
|
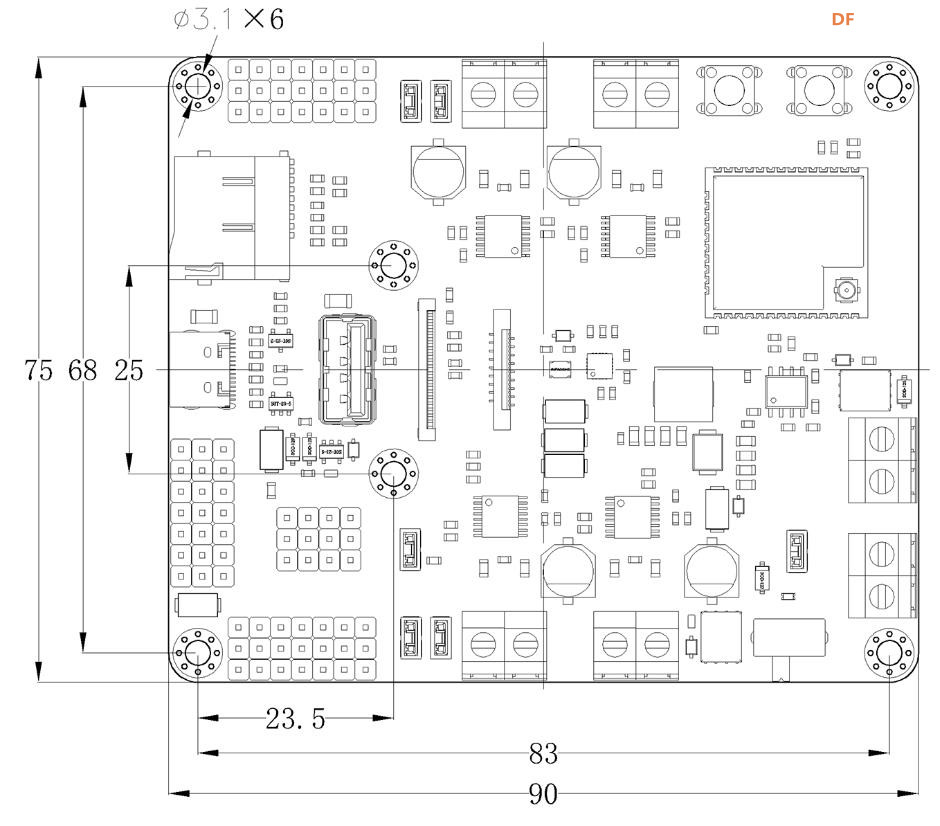
一、核心性能详解 1. 主控芯片与存储性能 开发板搭载ESP32-S3-WROOM-1U-N16R8高性能模组,采用Xtensa®双核32位LX7微处理器,主频最高可达240MHz,运算能力强劲,可轻松应对机器人实时控制、数据处理、图像解析等高频次任务。模组内置16MB超大Flash与8MB PSRAM,存储空间充裕,既能存储复杂机器人控制代码、AI算法模型,也能缓存视频图像、传感器采集数据,杜绝因存储不足导致的功能受限问题。 芯片内置向量指令,可加速神经网络计算与信号处理,为图像识别、语音识别、智能决策等AI功能提供底层算力支撑,无需额外搭载算力模块,降低机器人开发成本与硬件复杂度。 2. 通讯与驱动性能 支持2.4GHz Wi-Fi(IEEE 802.11b/g/n)与Bluetooth 5 (LE)双模通讯,兼顾无线遥控、视频图传、数据传输、蓝牙组网等多重需求,Wi-Fi支持Station、SoftAP、混杂等多种模式,蓝牙支持mesh组网,远距离无线操控与数据传输更稳定。 配备四路2.5A大电流H桥电机驱动,支持PH/EN、PWM两种控制模式,驱动能力强劲,可直接适配2WD、4WD轮式机器人,无需外接电机驱动模块,简化硬件接线;5V电源最大输出电流达2A,可稳定驱动多路舵机,轻松实现机械臂、云台等机械结构控制。 3. 基础硬件参数 •供电参数:Type-C 5V输入、VIN 7-24V输入、VM 5-24V输入,模组工作电压3.3V,适配多场景供电方式 •工作环境:0~60℃,满足室内外常规机器人研发与使用需求 •物理尺寸:75x90mm,体积小巧,便于集成到各类机器人载体中 •基础存储:内置512KB SRAM、384KB ROM、16KB RTC SRAM,配合大存储模组,运行更流畅  |
|
二、核心特色亮点 1. FPV第一视角,沉浸式机器人体验 板载OV2640高清摄像头,拥有200万像素,最高支持1600*1200分辨率,拍摄、录制画面清晰细腻。搭配独立摄像头供电电路,供电稳定无干扰,通过手机、电脑端即可实现实时视频图传,解锁机器人第一视角操控,沉浸式体验机器人探索过程;后续可搭载AI算法,实现目标识别、物体追踪、视觉避障等智能功能,升级机器人智能化水平。 2. 丰富扩展接口,玩法无限拓展 开发板预留多元化数据接口与引脚资源,硬件扩展性拉满,可按需外接各类外设,持续升级机器人功能,具体接口配置如下: •通用接口:27路数字I/O、2路SPI、3路UART、2路I2C、2路I2S,适配主流传感器与外设 •专用接口:GDI显示接口、DVP摄像头接口、USB 2.0 OTG全速接口、MicroSD卡接口 •功能外设:8通道LED PWM控制器、20通道12位SAR ADC、5收5发红外收发器、5收5发DMA控制器 可外接麦克风实现声控交互、功放模块实现语音播报、气体传感器实现环境监测、舵机实现机械臂操控,轻松打造多功能智能机器人。 3. 开发门槛低,适配多环境编程 打破复杂嵌入式开发壁垒,支持Arduino IDE、ESP-IDF等主流开发环境,兼容C++、MicroPython两种常用编程语言,无论是嵌入式开发老手,还是零基础入门新手,都能借助熟悉的工具与语言,快速完成机器人代码编写、调试与烧录,大幅缩短开发周期,降低研发难度。 4. 专属电机驱动,适配多类型机器人 针对机器人开发优化硬件设计,四路大电流电机驱动可直接适配2WD两轮驱动、4WD四轮驱动机器人,控制模式灵活可选,电机启停、转速、转向调控精准,满足移动机器人巡航、避障、竞速等各类动作需求,无需额外搭建驱动电路,硬件搭建更高效。 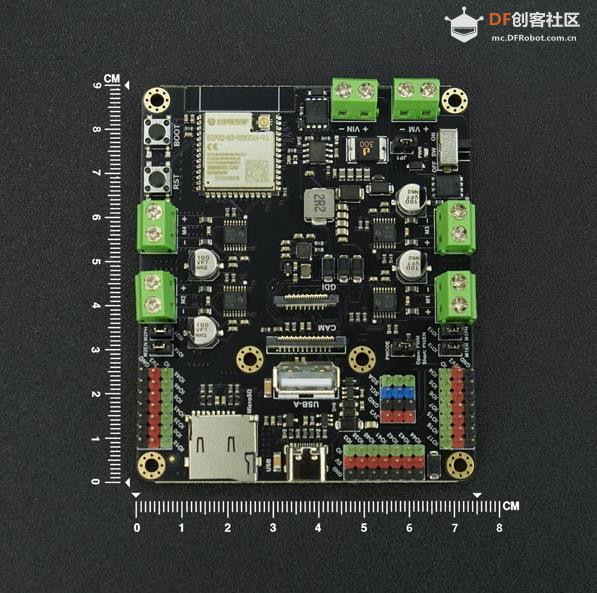 |
|
本帖最后由 驴友花雕 于 2026-3-16 07:34 编辑 三、适配使用场景 1. 入门级机器人教学与DIY 适配中小学机器人社团、高校嵌入式入门课程、创客DIY项目,借助简单的编程逻辑,即可搭建基础遥控小车、避障机器人,帮助新手快速掌握嵌入式开发、机器人控制、无线通讯等核心知识,兼顾趣味性与实用性。 2. 智能视觉机器人研发 依托板载摄像头与AI算力,开发视觉巡线机器人、目标追踪机器人、视觉避障机器人、人脸识别机器人等,适用于智能安防、家庭陪伴、实验室研发等场景,实现机器人智能化升级。 3. 多功能特种机器人开发 借助丰富扩展接口,外接各类传感器与执行机构,开发环境监测机器人、声控互动机器人、机械臂搬运机器人、遥控勘探机器人等,满足工业实训、科研创新、生活辅助等多元化需求。 4. 物联网联动机器人项目 利用Wi-Fi与蓝牙双模通讯,实现机器人与手机、电脑、智能家居设备的联动,打造物联网遥控机器人,支持远程操控、数据回传、指令下发,适配智能家居、智慧园区等物联网场景。 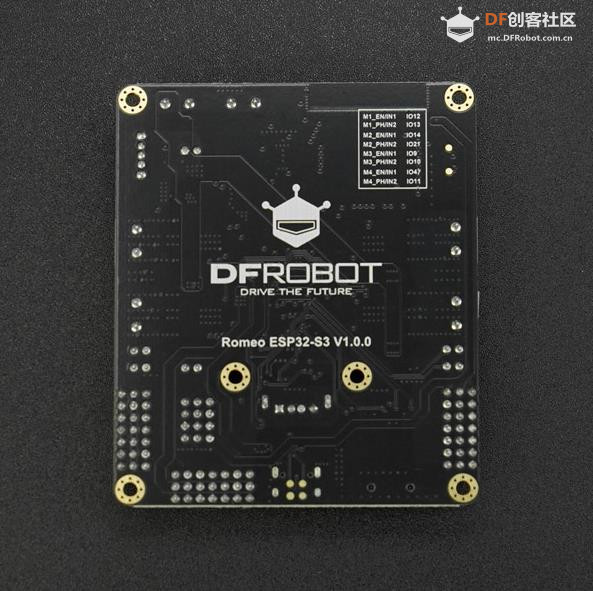 |
|
四、主要参数 1、基本情况 Type-C输入电压: 5V DC 模组工作电压: 3.3V VIN输入电压:7-24V VM输入电压:5-24V 5V电源最大输出电流:2A 电机驱动能力:2.5A 工作温度:0~60℃ 模块尺寸:75*90mm 2、硬件信息 处理器:Xtensa® 双核32位LX7微处理器 主频:240 MHz SRAM:512KB ROM:384KB Flash:16MB PSRAM: 8MB RTC SRAM:16KB USB: USB 2.0 OTG全速接口 3、WIFI WIFI协议:IEEE 802.11b/g/n WIFI频宽: 2.4 GHz 频带支持 20 MHz 和 40 MHz 频宽 WIFI模式:Station 模式、SoftAP 模式、SoftAP+Station 模式和混杂模式 WIFI频率:2.4GHz 帧聚合: TX/RX A-MPDU, TX/RX A-MSDU 4、蓝牙 蓝牙协议:Bluetooth 5、Bluetooth mesh 蓝牙频率:125 Kbps、500 Kbps、1 Mbps、2 Mbps 5、接口引脚 数字I/O x27 LED PWM 控制器 8个通道 SPI x2 UART x3 I2C x2 I2S x2 红外收发器:发送通道 x5、接收通道 x5 2 × 12 位 SAR ADC, 20个通道 DMA 控制器,5 个接收通道和 5 个发送通道  |
|
五、板载资源说明 Type-C:5V输入 • 5V:5V电源输出 • VIN:7-24V, 主控电源输入 • VM:5-24V, 电机电源输入 • JP1:电源切换跳线帽,短接时控制器和电机共用电源 • SW:电源控制开关 • PMODE: 电机驱动模式跳线帽,短接时为PH/EN控制模式,断开时为PWM控制模式 • Motor:电机接线端子 • ESP32-S3模组:乐鑫公司推出的ESP32-S3模组 • M1EN/M1PH:M1电机驱动跳线 • M2EN/M2PH:M2电机驱动跳线 • RST:复位按键 • BOOT:BOOT按键 • AXP313A:电源管理芯片 • GDI:GDI显示屏接口 • CAM:DVP摄像头接口 • USB:USB接口,可接USB外设 • MicroSD:TF卡卡槽 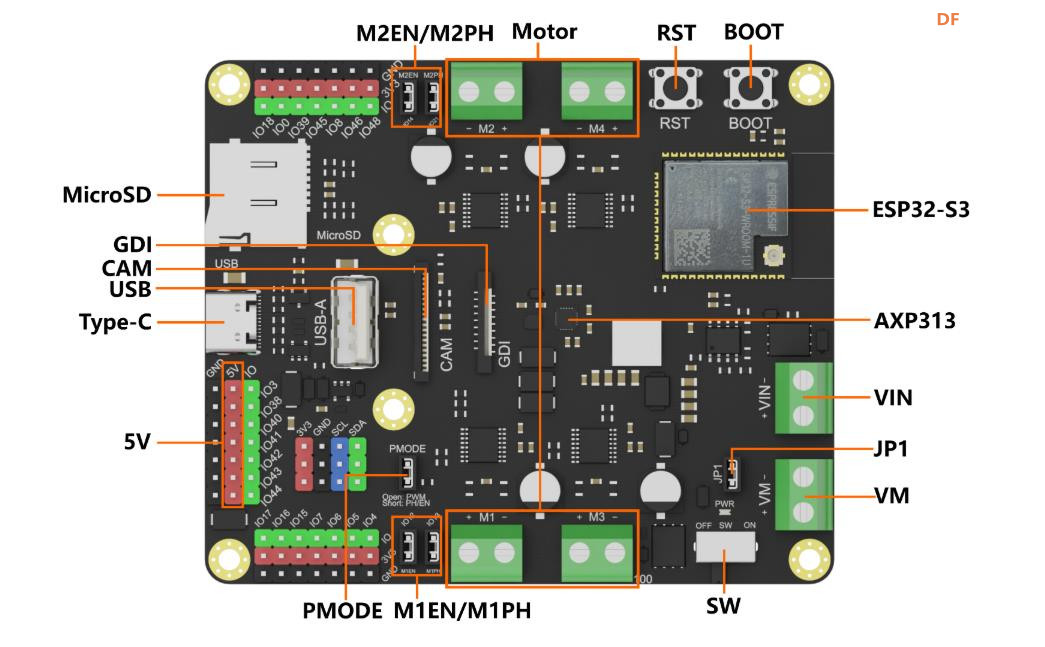 |
|
七、实操注意事项 核心注意事项:规范硬件接线、合理匹配电源、把控开发细节,保障开发板稳定运行,延长使用寿命。 1. 供电与接线规范 严格遵循供电电压要求,Type-C接口仅支持5V输入,切勿接入高压电源;VIN与VM接口需匹配对应电压范围,避免电压过高烧毁模组。电机、舵机等大功率外设接线时,确保正负极无误,防止短路;多路外设同时接入时,留意5V电源输出负载,避免超2A最大输出电流导致供电不稳。 2. 硬件使用防护 使用环境需控制在0~60℃范围内,避免高温、潮湿、粉尘环境,防止电路板短路、元器件老化。摄像头模块轻拿轻放,避免镜头划伤、排线断裂;插拔外设时断电操作,严禁带电插拔,防止静电击穿芯片。 3. 开发与调试要点 新手推荐优先使用Arduino IDE搭配MicroPython编程,降低调试难度;烧录代码前,确认开发板型号、端口配置无误,避免烧录失败。运行AI视觉、视频图传等功能时,合理优化代码,避免占用过多内存导致运行卡顿;电机驱动调试时,先低转速测试,确认运转正常后再提升转速,防止电机堵转损坏驱动模块。 4. 扩展外设适配 外接传感器、舵机、功放等外设时,优先选择3.3V/5V兼容型号,匹配开发板电平标准;大功率外设建议外接独立电源,避免分流影响主控模组运行。红外、蓝牙、Wi-Fi通讯时,远离强电磁干扰环境,保证信号传输稳定,避免遥控、图传中断。  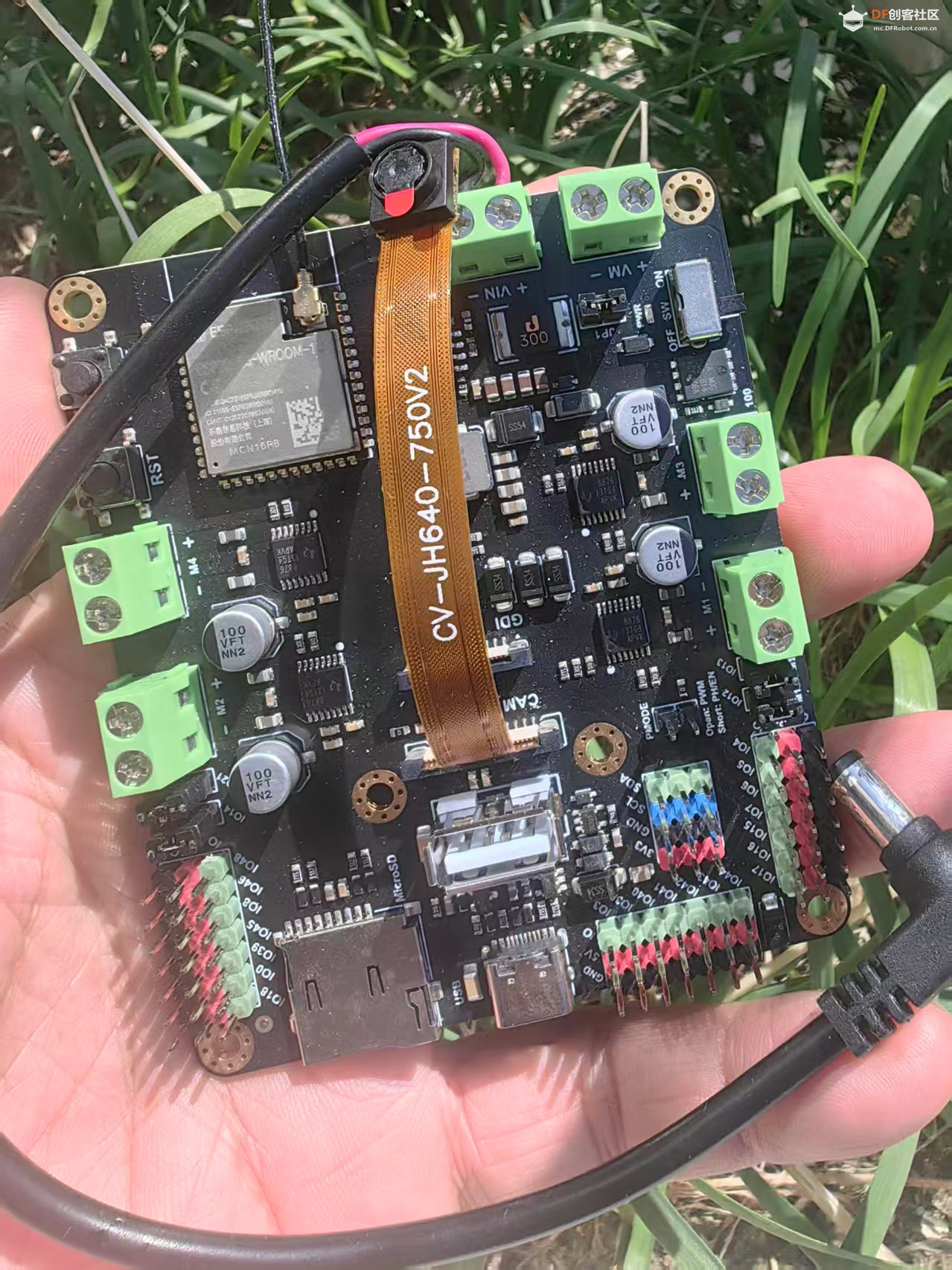 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶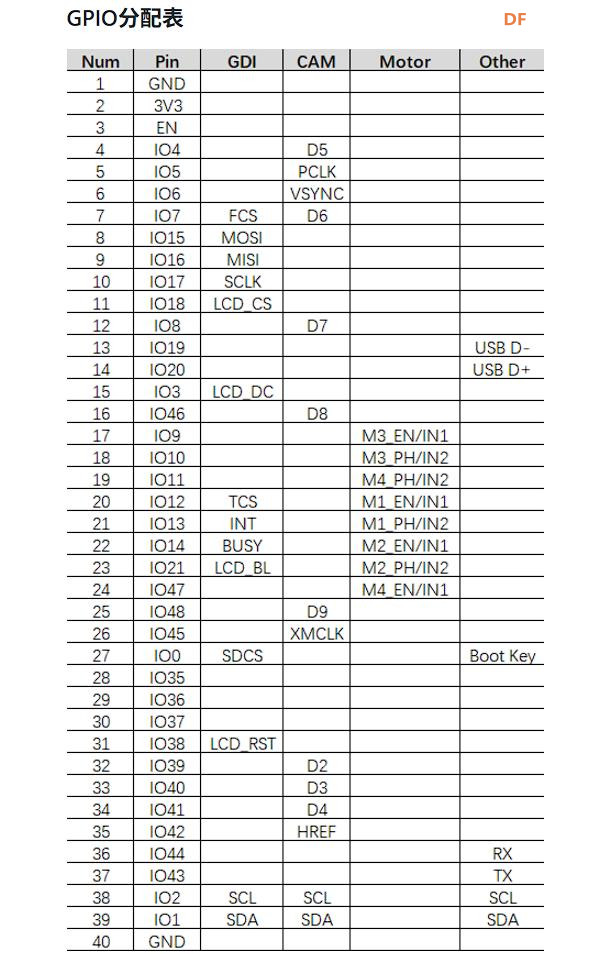

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






