|
2287| 10
|
[项目] 【花雕学编程】Arduino动手做(234)---WeMos D1R32控制360舵机 |
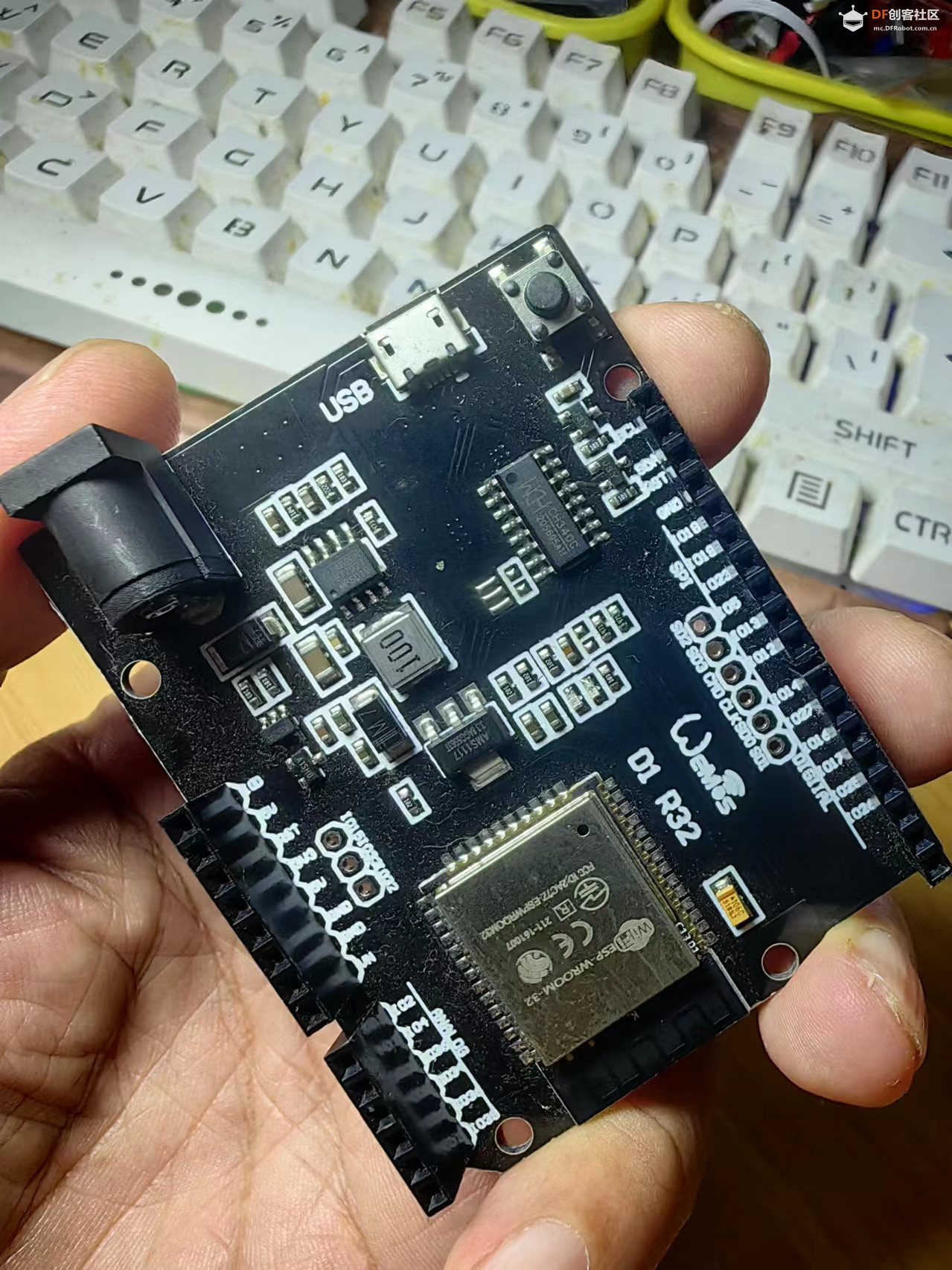 Wemos D1 ESP32 开发板是一款紧凑而强大的设备,它集成了天线和射频巴伦、功率放大器、低噪声放大器、滤波器和电源管理模块。整个解决方案占用的印刷电路板面积最少。该板采用台积电 40nm 低功耗技术,搭配 2.4GHz 双模 Wi-Fi 和蓝牙芯片,功率和射频性能最佳,安全可靠,可扩展至各种应用。将 WiFi 和蓝牙连接结合在单个 ESP32 芯片上。Wemos D1 ESP32 开发板是基于乐鑫 ESP32 芯片的开发板。它具有 Wi-Fi 和蓝牙连接,以及一系列用于连接传感器、执行器和其他设备的输入和输出引脚。该板具有高性能处理器和广泛的功能,是物联网和家庭自动化项目的理想选择。此外,该板具有易于使用的界面,采用 Arduino UNO 外形尺寸,并与 Arduino 平台兼容,可以轻松开发项目并与其他设备集成。借助 Wemos D1 ESP32 开发板,您可以轻松地为各种应用创建智能、互联的解决方案。该板的一些规格包括: - 240 MHz 双核 LX6 芯片 - Wi-Fi 802.11 b/g/n 连接 - 蓝牙 4.2 BLE 连接 - 4 MB 闪存 - 520 KB SRAM - 30 针输入/输出,包括 GPIO、I2C、SPI、UART 和 ADC - MicroSD支持 - LiPo电池充电支持 该板与 Arduino 平台兼容,可以使用 Arduino IDE 进行编程。此外,它还支持 MicroPython 平台,该平台允许使用 Python 进行编程。 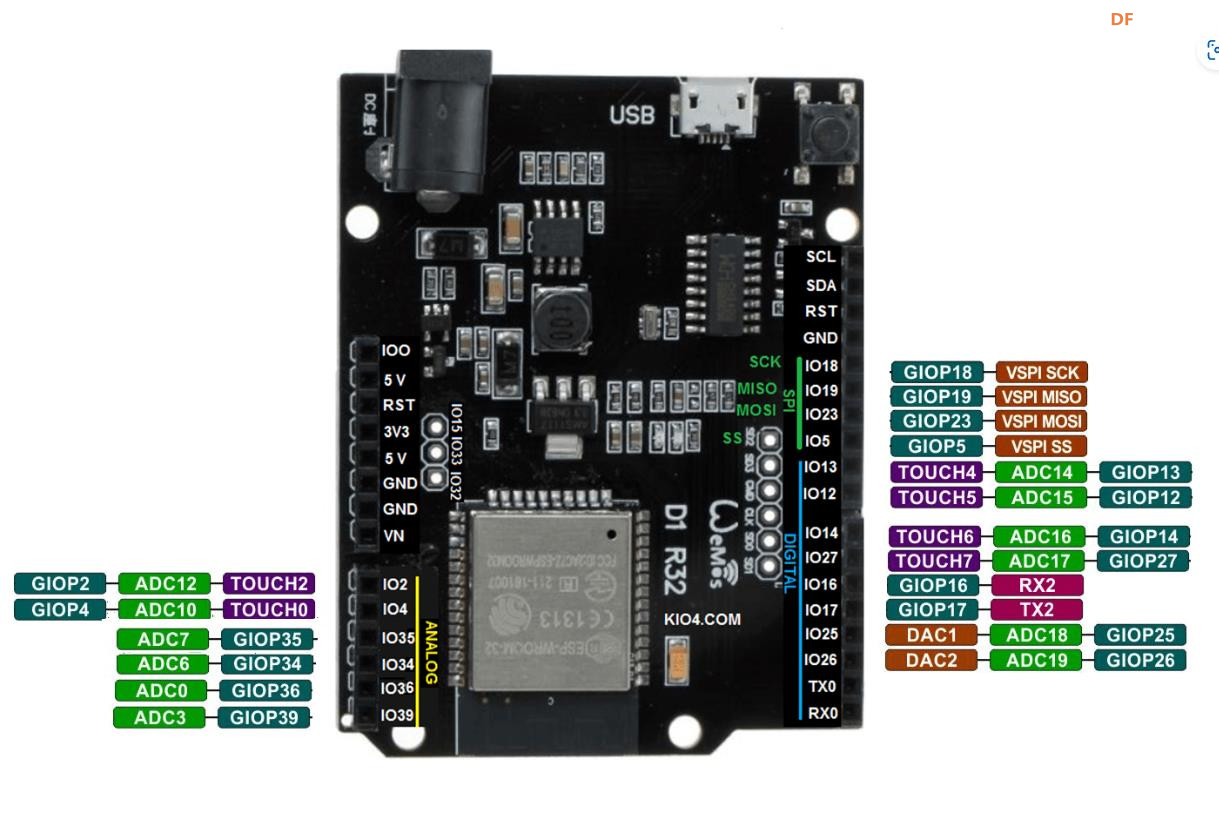 |
|
ESP32 SPP(Serial Port Profile)是一种基于蓝牙的经典蓝牙串口通信协议,它允许设备之间通过蓝牙进行串口数据传输。在ESP32中,SPP功能可以通过软件协议栈实现,使得ESP32可以作为一个蓝牙串口服务器或客户端与其他蓝牙设备进行通信。 1、Arduino Arduino 是一种开源硬件和软件平台,用于制作电子项目和物联网(IoT)设备。它包括一个开发板和一套编程环境,使用户可以通过简单的代码来控制各种电子元件。 2、ESP32 ESP32 是由 Espressif Systems 设计的一款单片机(SoC),集成了 Wi-Fi 和蓝牙功能。它广泛应用于移动设备、可穿戴设备和物联网(IoT)应用。ESP32 提供丰富的外设接口和高性能,非常适合开发各种嵌入式系统。 3、SPP(Serial Port Profile) SPP(Serial Port Profile) 是蓝牙协议中的一种,它模拟了传统的 RS-232(UART)串行连接。通过 SPP,ESP32 可以通过蓝牙与其他设备进行数据传输,就像通过串行端口一样。 4、Arduino ESP32 SPP Arduino ESP32 SPP 指的是使用 Arduino 开发环境在 ESP32 上实现蓝牙串行端口协议(SPP)。通过这种方式,你可以编写代码来控制 ESP32 的蓝牙功能,使其能够与其他蓝牙设备进行通信。 5、全面详细的科学解释 1)Arduino 开发环境:Arduino 提供了一套开发环境,包括编译器、IDE(集成开发环境)和各种库,使用户可以通过简单的代码来控制硬件。 2)ESP32 硬件:ESP32 是一款集成了 Wi-Fi 和蓝牙的单片机,具有多个 GPIO 引脚、ADC、DAC、PWM 等功能,适用于各种嵌入式系统开发。 3)SPP 协议:SPP 是蓝牙协议中的一种,通过模拟 RS-232 串行连接,实现无线数据传输。SPP 通常用于替代传统的串行端口,使设备可以通过蓝牙进行通信。 4)Arduino ESP32 SPP 应用:通过 Arduino 开发环境在 ESP32 上实现 SPP,可以编写代码来初始化蓝牙、发现服务、建立连接、发送和接收数据。这种应用广泛用于物联网设备、远程控制和数据传输等场景。  |
|
MG996R舵机是一种高性能的舵机,它具有金属齿轮和双轴承设计,能够提供高扭矩和稳定的运行。以下是MG996R舵机的一些主要特性和应用: 1、结构材质:MG996R舵机采用金属齿轮,这使得它比塑料齿轮的舵机更加耐用,能够承受更大的负载。 2、连接线长度:MG996R舵机的连接线长度为30厘米,其中包含信号线(黄线)、电源线(红线)和地线(棕色)。 3、尺寸和重量:其尺寸为40.7mm × 19.7mm × 42.9mm,重量为55克。 4、反应转速:在无负载的情况下,MG996R舵机的速度为0.17秒/60度(在4.8V下)和0.13秒/60度(在6.0V下)。 5、工作死区:MG996R舵机的工作死区为4微秒。 6、工作电压:MG996R舵机的工作电压范围是3.0V到6.0V。 7、工作扭矩:在4.8V的工作电压下,MG996R舵机的工作扭矩为13KG/cm。 8、控制方法:MG996R舵机通过PWM(脉冲宽度调制)信号进行控制。对于360度舵机,PWM信号的周期为20ms,其中脉冲宽度在0.5ms到2.5ms之间。舵机的控制不仅包括方向,还包括速度。舵机正转时,脉冲宽度在0.5ms到1.5ms之间变化,对应不同的速度;舵机反转时,脉冲宽度在1.5ms到2.5ms之间变化。 9、应用:MG996R舵机由于其高扭矩和快速响应的特点,被广泛应用于机器人、遥控飞机、遥控车模以及其他需要精确控制的领域。 10、注意事项:在使用MG996R舵机时,需要注意PWM信号的分辨率应调制到0.1ms,以确保舵机能够平滑地改变方向和速度。 MG996R舵机的这些特性使其成为一个多功能和可靠的执行元件,适用于各种需要精确控制角度和速度的应用。  |
|
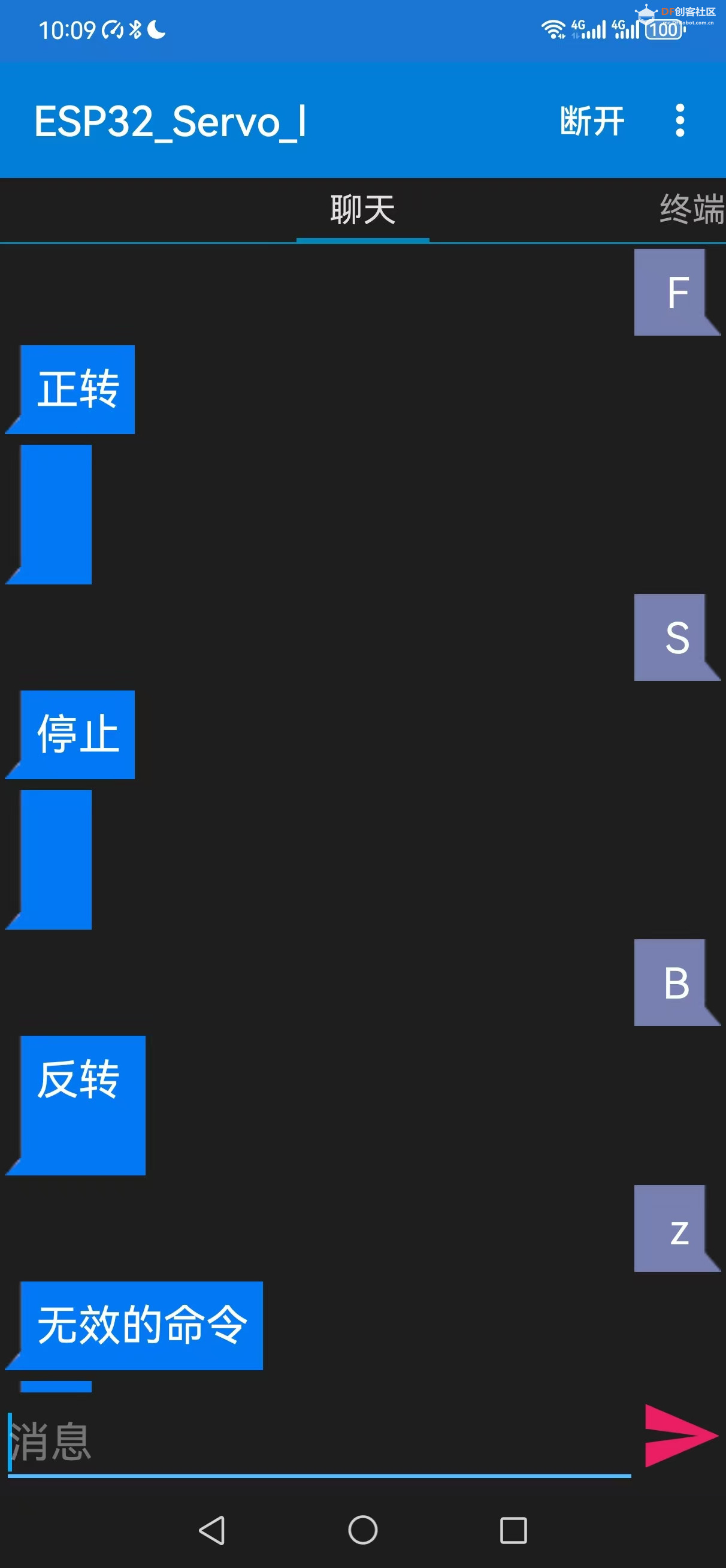
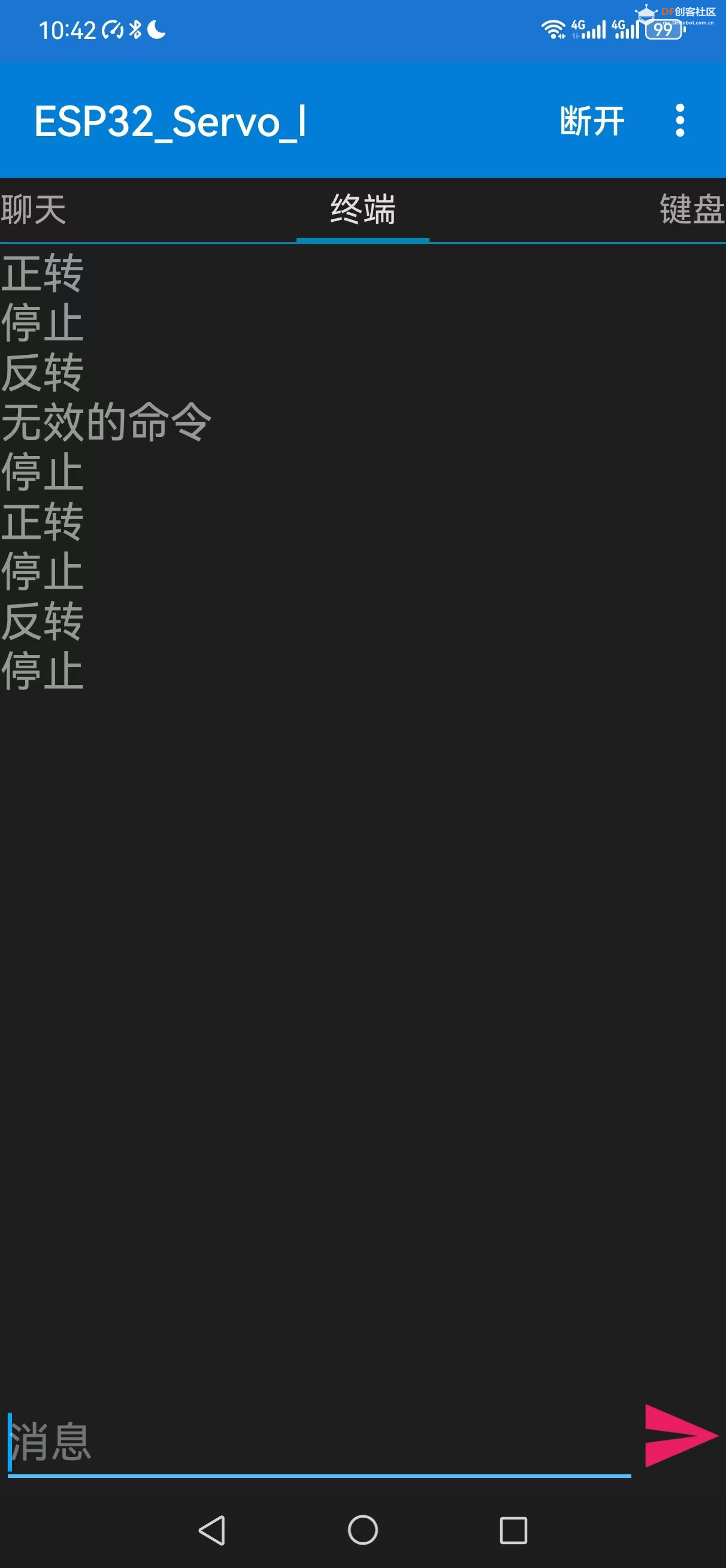
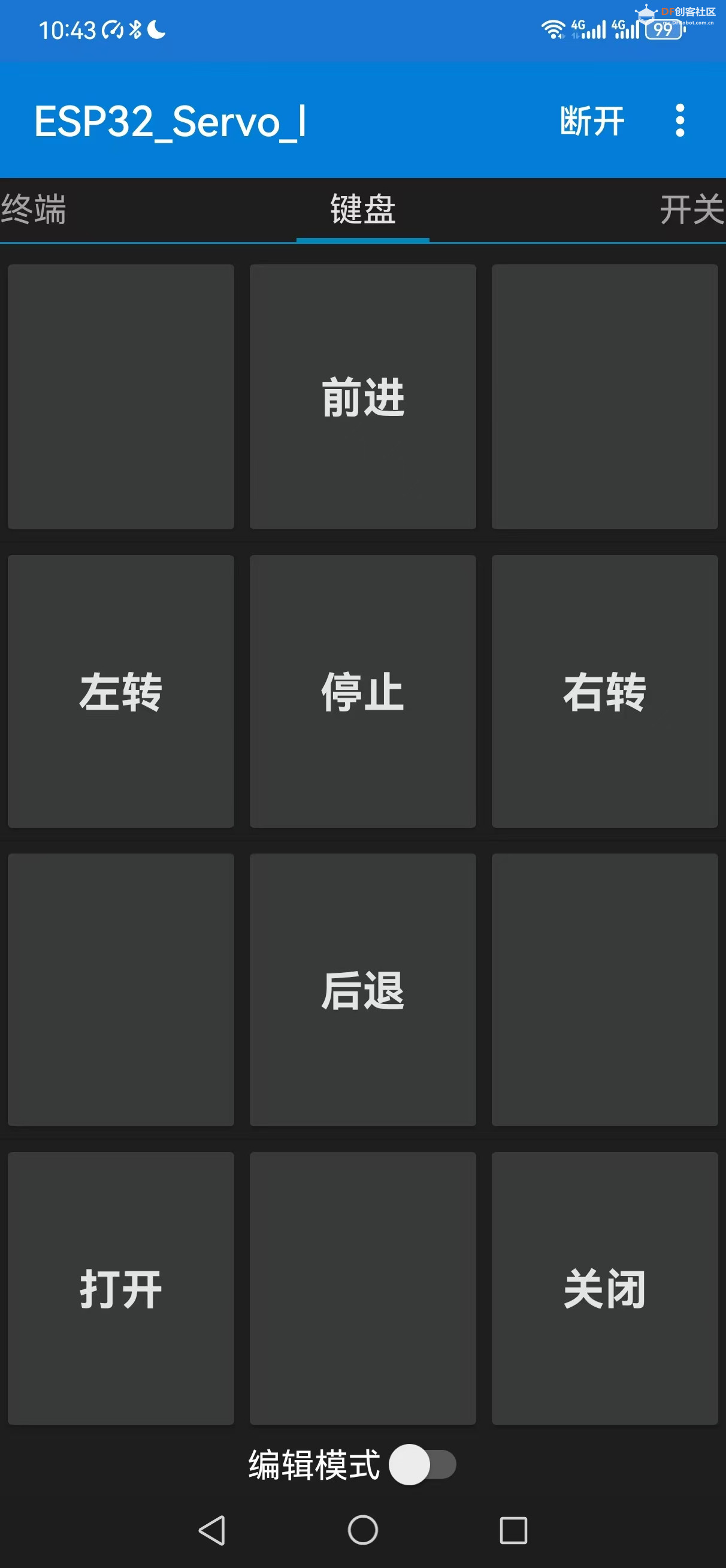
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百三十四:Wemos D1 迷你Arduino Uno R3 D1 R32 ESP32 Wifi蓝牙无线开发板CH340 4M内存 {花雕动手做}项目之十五:Esp32 WeMos D1R32蓝牙控制360度舵机正转、反转和停止 实验接脚:2脚为板载LED,4脚接360度舵机 实验开源代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






