本帖最后由 驴友花雕 于 2025-5-22 19:02 编辑
第 6 步:项目代码
我基于这个项目开发了 Esghati 的平台并添加了更多功能。我在 GitHub 上上传了该项目的源代码,单击此处重定向。
- #include <SoftwareSerial.h>
- #include <VarSpeedServo.h>
-
- SoftwareSerial mySerial(4, 3);
-
- VarSpeedServo Rwheel;
- VarSpeedServo Lwheel;
-
- int VSPEED = 5 , HSPEED = 10 , MSPEED = 50, MACCEL = 125;
- int MAX_VSPEED = 10 , MAX_HSPEED = 20 , MAX_MSPEED = 255, MSTOP = 1500, MSTOPdeg = 90;
-
- String command;
- bool commandEnd=false;
- char inByte;
- int arg = 0;
-
- void setup() {
- // put your setup code here, to run once:
- Serial.begin(115200);
- mySerial.begin(9600);
-
- Rwheel.attach(6);
- delay(100);
- Rwheel.write(MSTOP);
- delay(300);
-
- Lwheel.attach(5);
- delay(100);
- Lwheel.write(MSTOP);
- delay(300);
- }
-
- void loop() {
- // put your main code here, to run repeatedly:
- if (mySerial.available() > 0) {
-
- if(commandEnd){
- command="";
- commandEnd=false;
- }
- inByte = mySerial.read();
- if (inByte != '\n') {
- if (inByte == '=') {
- arg = mySerial.parseInt();
- //Serial.println(arg);
- } else {
- command += inByte;
- }
- }else{
- commandEnd=true;
- Serial.println(command);
- execute(command, arg);
- }
- }
-
- }
-
- void execute(String command, int arg){
- if(compareString(command, "l-rotate")){
- Rwheel.write(MSTOPdeg-MSPEED,MACCEL);
- Lwheel.write(MSTOPdeg-MSPEED,MACCEL);
- command="";
- }else if(compareString(command, "r-rotate")){
- Rwheel.write(MSTOPdeg+MSPEED,MACCEL);
- Lwheel.write(MSTOPdeg+MSPEED,MACCEL);
- command="";
- }else if(compareString(command, "f-forward")){
- Rwheel.write(MSTOPdeg-MSPEED, MACCEL);
- Lwheel.write(MSTOPdeg+MSPEED, MACCEL);
- command="";
- }else if(compareString(command, "f-left")){
- Rwheel.write(MSTOPdeg-MSPEED,MACCEL);
- Lwheel.write(MSTOP);
- command="";
- }else if(compareString(command, "f-right")){
- Rwheel.write(MSTOP);
- Lwheel.write(MSTOPdeg+MSPEED,MACCEL);
- command="";
- }else if(compareString(command, "b-backward")){
- Rwheel.write(MSTOPdeg+MSPEED,MACCEL);
- Lwheel.write(MSTOPdeg-MSPEED,MACCEL);
- command="";
- }else if(compareString(command, "b-right")){
- Rwheel.write(MSTOPdeg+MSPEED,MACCEL);
- Lwheel.write(MSTOP);
- command="";
- }else if(compareString(command, "b-left")){
- Rwheel.write(MSTOP);
- Lwheel.write(MSTOPdeg-MSPEED,MACCEL);
- command="";
- }else if(compareString(command, "stop")){
- Rwheel.write(MSTOP);
- Lwheel.write(MSTOP);
- command="";
- }
- command="";
- }
-
- boolean compareString(String a, String b) {
- if (a.length() != b.length() + 1) {
- return false;
- }
- for (int i = 0; i < a.length() - 1; i++) {
- if (a[i] != b[i]) {
- return false;
- }
- }
- return true;
- }
- #include <ArduinoWebsockets.h>
- #include "esp_http_server.h"
- #include "esp_timer.h"
- #include "esp_camera.h"
- #include "camera_index.h"
- #include "Arduino.h"
- #include "fd_forward.h"
- #include "fr_forward.h"
- #include "fr_flash.h"
- #include "fb_gfx.h"
-
- const char* ssid = "your ssid";
- const char* password = "your password";
-
- #define ENROLL_CONFIRM_TIMES 5
- #define FACE_ID_SAVE_NUMBER 7
- #define LED_BUILTIN 4
- bool INT_LED = false;
- hw_timer_t *My_timer = NULL;
- // Select camera model
- //#define CAMERA_MODEL_WROVER_KIT
- //#define CAMERA_MODEL_ESP_EYE
- //#define CAMERA_MODEL_M5STACK_PSRAM
- //#define CAMERA_MODEL_M5STACK_WIDE
- #define CAMERA_MODEL_AI_THINKER
- #include "camera_pins.h"
-
- using namespace websockets;
- WebsocketsServer socket_server;
-
- camera_fb_t * fb = NULL;
-
- long current_millis;
- long last_detected_millis = 0;
-
- #define RED 15 // pin 12 can also be used
- #define GREEN 14
- #define BLUE 2
- #define Mic 12
- int light = 0;
- unsigned long door_opened_millis = 0;
- long interval = 5000; // open lock for ... milliseconds
- bool face_recognised = false;
-
- const int numReadings = 5;
- int readings[numReadings]; // the readings from the analog input
- int readIndex = 0;
- int total = 0; // the running total
- int average_face_size = 0; // the average
- int face_distance;
- int face_id = 0;
- String command;
- bool commandEnd=false;
- char inByte;
- int arg = 0;
- bool follow = 0;
-
- //void app_facenet_main();
- //void app_httpserver_init();
-
- typedef struct
- {
- uint8_t *image;
- box_array_t *net_boxes;
- dl_matrix3d_t *face_id;
- } http_img_process_result;
-
-
- static inline mtmn_config_t app_mtmn_config()
- {
- mtmn_config_t mtmn_config = {0};
- mtmn_config.type = FAST;
- mtmn_config.min_face = 80;
- mtmn_config.pyramid = 0.707;
- mtmn_config.pyramid_times = 4;
- mtmn_config.p_threshold.score = 0.6;
- mtmn_config.p_threshold.nms = 0.7;
- mtmn_config.p_threshold.candidate_number = 20;
- mtmn_config.r_threshold.score = 0.7;
- mtmn_config.r_threshold.nms = 0.7;
- mtmn_config.r_threshold.candidate_number = 10;
- mtmn_config.o_threshold.score = 0.7;
- mtmn_config.o_threshold.nms = 0.7;
- mtmn_config.o_threshold.candidate_number = 1;
- return mtmn_config;
- }
- mtmn_config_t mtmn_config = app_mtmn_config();
-
- face_id_name_list st_face_list;
- static dl_matrix3du_t *aligned_face = NULL;
-
- httpd_handle_t camera_httpd = NULL;
-
- typedef enum
- {
- START_STREAM,
- START_DETECT,
- SHOW_FACES,
- START_RECOGNITION,
- START_ENROLL,
- ENROLL_COMPLETE,
- DELETE_ALL,
- } en_fsm_state;
- en_fsm_state g_state;
-
- typedef struct
- {
- char enroll_name[ENROLL_NAME_LEN];
- } httpd_resp_value;
-
- httpd_resp_value st_name;
- void IRAM_ATTR onTimer(){
- Serial.println("task");
- }
- void setup() {
- Serial.begin(9600);
- Serial.setDebugOutput(true);
- Serial.println();
-
- pinMode (LED_BUILTIN, OUTPUT);
- pinMode(RED, OUTPUT);
- pinMode(GREEN, OUTPUT);
- pinMode(BLUE, OUTPUT);
- pinMode(33, OUTPUT);
- pinMode(Mic, INPUT);
- digitalWrite(33, HIGH);
- digitalWrite(RED, LOW);
- digitalWrite(GREEN, LOW);
- digitalWrite(BLUE, LOW);
- camera_config_t config;
- config.ledc_channel = LEDC_CHANNEL_0;
- config.ledc_timer = LEDC_TIMER_0;
- config.pin_d0 = Y2_GPIO_NUM;
- config.pin_d1 = Y3_GPIO_NUM;
- config.pin_d2 = Y4_GPIO_NUM;
- config.pin_d3 = Y5_GPIO_NUM;
- config.pin_d4 = Y6_GPIO_NUM;
- config.pin_d5 = Y7_GPIO_NUM;
- config.pin_d6 = Y8_GPIO_NUM;
- config.pin_d7 = Y9_GPIO_NUM;
- config.pin_xclk = XCLK_GPIO_NUM;
- config.pin_pclk = PCLK_GPIO_NUM;
- config.pin_vsync = VSYNC_GPIO_NUM;
- config.pin_href = HREF_GPIO_NUM;
- config.pin_sscb_sda = SIOD_GPIO_NUM;
- config.pin_sscb_scl = SIOC_GPIO_NUM;
- config.pin_pwdn = PWDN_GPIO_NUM;
- config.pin_reset = RESET_GPIO_NUM;
- config.xclk_freq_hz = 10000000;
- config.pixel_format = PIXFORMAT_JPEG;
- //init with high specs to pre-allocate larger buffers
- if (psramFound()) {
- config.frame_size = FRAMESIZE_UXGA;
- config.jpeg_quality = 10;
- config.fb_count = 2;
- } else {
- config.frame_size = FRAMESIZE_SVGA;
- config.jpeg_quality = 12;
- config.fb_count = 1;
- }
-
- #if defined(CAMERA_MODEL_ESP_EYE)
- pinMode(13, INPUT_PULLUP);
- pinMode(14, INPUT_PULLUP);
- #endif
-
- // camera init
- esp_err_t err = esp_camera_init(&config);
- if (err != ESP_OK) {
- Serial.printf("Camera init failed with error 0x%x", err);
- return;
- }
-
- sensor_t * s = esp_camera_sensor_get();
- s->set_framesize(s, FRAMESIZE_QVGA);
-
- #if defined(CAMERA_MODEL_M5STACK_WIDE)
- s->set_vflip(s, 1);
- s->set_hmirror(s, 1);
- #endif
-
- WiFi.softAP(ssid, password);
- IPAddress IP = WiFi.softAPIP();
- Serial.print("ACCESS POINT IP address: ");
- Serial.println(IP);
-
- app_httpserver_init();
- app_facenet_main();
- socket_server.listen(82);
-
- Serial.print("Camera Ready! Use 'http://");
- Serial.print(WiFi.localIP());
- Serial.println("' to connect");
-
- My_timer = timerBegin(0, 80, true);
- timerAttachInterrupt(My_timer, &onTimer, true);
- timerAlarmWrite(My_timer, 300000000, true);
- timerAlarmEnable(My_timer);
- }
-
- static esp_err_t index_handler(httpd_req_t *req) {
- httpd_resp_set_type(req, "text/html");
- httpd_resp_set_hdr(req, "Content-Encoding", "gzip");
- return httpd_resp_send(req, (const char *)index_ov2640_html_gz, index_ov2640_html_gz_len);
- }
-
- httpd_uri_t index_uri = {
- .uri = "/",
- .method = HTTP_GET,
- .handler = index_handler,
- .user_ctx = NULL
- };
-
- void app_httpserver_init ()
- {
- httpd_config_t config = HTTPD_DEFAULT_CONFIG();
- if (httpd_start(&camera_httpd, &config) == ESP_OK)
- Serial.println("httpd_start");
- {
- httpd_register_uri_handler(camera_httpd, &index_uri);
- }
- }
-
- void app_facenet_main()
- {
- face_id_name_init(&st_face_list, FACE_ID_SAVE_NUMBER, ENROLL_CONFIRM_TIMES);
- aligned_face = dl_matrix3du_alloc(1, FACE_WIDTH, FACE_HEIGHT, 3);
- read_face_id_from_flash_with_name(&st_face_list);
- }
-
- static inline int do_enrollment(face_id_name_list *face_list, dl_matrix3d_t *new_id)
- {
- ESP_LOGD(TAG, "START ENROLLING");
- int left_sample_face = enroll_face_id_to_flash_with_name(face_list, new_id, st_name.enroll_name);
- ESP_LOGD(TAG, "Face ID %s Enrollment: Sample %d",
- st_name.enroll_name,
- ENROLL_CONFIRM_TIMES - left_sample_face);
- return left_sample_face;
- }
-
- static esp_err_t send_face_list(WebsocketsClient &client)
- {
- client.send("delete_faces"); // tell browser to delete all faces
- face_id_node *head = st_face_list.head;
- char add_face[64];
- for (int i = 0; i < st_face_list.count; i++) // loop current faces
- {
- sprintf(add_face, "listface:%s", head->id_name);
- client.send(add_face); //send face to browser
- head = head->next;
- }
- }
-
- static esp_err_t delete_all_faces(WebsocketsClient &client)
- {
- delete_face_all_in_flash_with_name(&st_face_list);
- client.send("delete_faces");
- }
-
- void handle_message(WebsocketsClient &client, WebsocketsMessage msg)
- {
- timerWrite(My_timer, 0); //reset timer (feed watchdog)
- //Serial.println(msg.data());
- if (msg.data() == "stream") {
- g_state = START_STREAM;
- client.send("STREAMING");
- }else if (msg.data() == "detect") {
- g_state = START_DETECT;
- client.send("DETECTING");
- }else if (msg.data().substring(0, 8) == "capture:") {
- g_state = START_ENROLL;
- char person[FACE_ID_SAVE_NUMBER * ENROLL_NAME_LEN] = {0,};
- msg.data().substring(8).toCharArray(person, sizeof(person));
- memcpy(st_name.enroll_name, person, strlen(person) + 1);
- client.send("CAPTURING");
- }else if (msg.data() == "recognise") {
- g_state = START_RECOGNITION;
- client.send("RECOGNISING");
- }else if (msg.data().substring(0, 7) == "remove:") {
- char person[ENROLL_NAME_LEN * FACE_ID_SAVE_NUMBER];
- msg.data().substring(7).toCharArray(person, sizeof(person));
- delete_face_id_in_flash_with_name(&st_face_list, person);
- send_face_list(client); // reset faces in the browser
- }else if (msg.data().substring(0, 5) == "tilt:") {
- //int i = msg.data().substring(5).toInt();
- Serial.print("tilt=");
- Serial.println(msg.data().substring(5));
- }else if (msg.data().substring(0, 4) == "pan:") {
- //int j = msg.data().substring(4).toInt();
- Serial.print("pan=");
- Serial.println(msg.data().substring(4));
- }else if (msg.data().substring(0, 9) == "lr-rhand:") {
- //int i = msg.data().substring(5).toInt();
- Serial.print("lr-rhand=");
- Serial.println(msg.data().substring(9));
- }else if (msg.data().substring(0, 9) == "ud-rhand:") {
- //int j = msg.data().substring(4).toInt();
- Serial.print("ud-rhand=");
- Serial.println(msg.data().substring(9));
- }else if (msg.data().substring(0, 9) == "lr-lhand:") {
- //int i = msg.data().substring(5).toInt();
- Serial.print("lr-lhand=");
- Serial.println(msg.data().substring(9));
- }else if (msg.data().substring(0, 9) == "ud-lhand:") {
- //int j = msg.data().substring(4).toInt();
- Serial.print("ud-lhand=");
- Serial.println(msg.data().substring(9));
- }else if (msg.data() == "stop") {
- Serial.println("stop");
- }else if (msg.data() == "r-rotate") {
- Serial.println("r-rotate");
- }else if (msg.data() == "l-rotate") {
- Serial.println("l-rotate");
- }else if (msg.data() == "f-left") {
- Serial.println("f-left");
- }else if (msg.data() == "f-forward") {
- Serial.println("f-forward");
- }else if (msg.data() == "f-right") {
- Serial.println("f-right");
- }else if (msg.data() == "b-left") {
- Serial.println("b-left");
- }else if (msg.data() == "b-backward") {
- Serial.println("b-backward");
- }else if (msg.data() == "b-right") {
- Serial.println("b-right");
- }else if (msg.data() == "introduce") {
- Serial.println("introduce");
- }else if (msg.data() == "greet") {
- Serial.println("greet");
- }else if (msg.data() == "find" && g_state == START_RECOGNITION) {
- Serial.println("find");
- }else if (msg.data() == "follow") {
-
- if(!follow){
- Serial.println("follow");
- follow = true;
- }else{
- Serial.println("nofollow");
- follow = false;
- }
-
- }else if (msg.data() == "dance") {
- Serial.println("dance");
- }else if (msg.data() == "random") {
- Serial.println("random");
- }else if (msg.data() == "history") {
- Serial.println("history");
- }else if (msg.data() == "hymn") {
- Serial.println("hymn");
- }else if (msg.data() == "hreset") {
- Serial.println("hreset");
- }else if (msg.data() == "reset") {
- Serial.println("reset");
- }else if (msg.data() == "light") {
- if(INT_LED){
- digitalWrite(LED_BUILTIN, LOW);
- INT_LED = false;
- }else{
- digitalWrite(LED_BUILTIN, HIGH);
- INT_LED = true;
- }
-
- Serial.println("light");
- }else if (msg.data() == "rgb") {
- if(light == 0){
- digitalWrite(RED, HIGH);
- digitalWrite(GREEN, LOW);
- digitalWrite(BLUE, LOW);
- light++;
- }else if(light == 1){
- digitalWrite(RED, LOW);
- digitalWrite(GREEN, HIGH);
- digitalWrite(BLUE, LOW);
- light++;
- }else if(light == 2){
- digitalWrite(RED, LOW);
- digitalWrite(GREEN, LOW);
- digitalWrite(BLUE, HIGH);
- light++;
- }else{
- digitalWrite(RED, LOW);
- digitalWrite(GREEN, LOW);
- digitalWrite(BLUE, LOW);
- light=0;
- }
- Serial.println("rgb");
- }else if (msg.data() == "fire") {
- Serial.println("fire");
- }else if (msg.data() == "voicemode") {
- Serial.println("voicemode");
- }else if (msg.data() == "clearcache") {
- Serial.println("free heap: ");
- Serial.println(ESP.getFreeHeap());
- }else if (msg.data() == "seq1") {
- Serial.println("seq1");
- }else if (msg.data() == "seq2") {
- Serial.println("seq2");
- }else if (msg.data() == "seq3") {
- Serial.println("seq3");
- }else if (msg.data() == "seq4") {
- Serial.println("seq4");
- }
-
- }
-
- void open_door(WebsocketsClient &client) {
- if (true/*digitalRead(relay_pin) == LOW*/) {
- //digitalWrite(relay_pin, HIGH); //close (energise) relay so door unlocks
- Serial.println("sorush");
- client.send("door_open");
- door_opened_millis = millis(); // time relay closed and door opened
- }
- }
- static void draw_face_boxes(dl_matrix3du_t *image_matrix, box_array_t *boxes)
- {
- int x, y, w, h, i, half_width, half_height;
- fb_data_t fb;
- fb.width = image_matrix->w;
- fb.height = image_matrix->h;
- fb.data = image_matrix->item;
- fb.bytes_per_pixel = 3;
- fb.format = FB_BGR888;
- for (i = 0; i < boxes->len; i++) {
-
- // Convoluted way of finding face centre...
- x = ((int)boxes->box[i].box_p[0]);
- w = (int)boxes->box[i].box_p[2] - x + 1;
- half_width = w / 2;
- int face_center_pan = x + half_width; // current face centre x co-ordinate
-
- y = (int)boxes->box[i].box_p[1];
- h = (int)boxes->box[i].box_p[3] - y + 1;
- half_height = h / 2;
- int face_center_tilt = y + half_height; // current face centre y co-ordinate
-
- // subtract the last reading:
- total = total - readings[readIndex];
- // add current face height:
- readings[readIndex] = h;
- // add the reading to the total:
- total = total + readings[readIndex];
- // advance to the next position in the array:
- readIndex = readIndex + 1;
-
- // if we're at the end of the array...
- if (readIndex >= numReadings) {
- // ...wrap around to the beginning:
- readIndex = 0;
- }
-
- // calculate the average:
- average_face_size = total / numReadings;
-
- int eq_top = 3.6 * 200 * 240; //f(mm) x real height(mm) x image height(px)
- int eq_bottom = average_face_size * 2.7; //object height(px) x sensor height(mm)
- int face_distance = eq_top / eq_bottom;
-
- /*Serial.print('<'); // start marker
- Serial.print(face_center_pan);
- Serial.print(','); // comma separator
- Serial.print(face_center_tilt);
- Serial.print(','); // comma separator
- Serial.print(face_distance);
- Serial.println('>'); // end marker*/
- Serial.print("autopan=");
- Serial.println(face_center_pan);
- Serial.print("autotilt=");
- Serial.println(face_center_tilt);
- Serial.print("distance=");
- Serial.println(face_distance);
-
- }
- }
- void loop() {
-
- auto client = socket_server.accept();
- client.onMessage(handle_message);
- dl_matrix3du_t *image_matrix = dl_matrix3du_alloc(1, 320, 240, 3);
- http_img_process_result out_res = {0};
- out_res.image = image_matrix->item;
-
- send_face_list(client);
- client.send("STREAMING");
-
-
- while (client.available()) {
- client.poll();
-
- // char voice[12];
- // sprintf(voice, "voice:%s", (const char *)analogRead(12));
- // client.send(voice);
- // Serial.println(analogRead(12));
- // client.sendBinary((const char *)analogRead(12));
-
- if (Serial.available()) {
-
- String command = Serial.readStringUntil('\n');
- if (command == "red") {
- digitalWrite(RED, HIGH);
- digitalWrite(GREEN, LOW);
- digitalWrite(BLUE, LOW);
- } else if (command == "green") {
- digitalWrite(RED, LOW);
- digitalWrite(GREEN, HIGH);
- digitalWrite(BLUE, LOW);
- } else if (command == "blue") {
- digitalWrite(RED, LOW);
- digitalWrite(GREEN, LOW);
- digitalWrite(BLUE, HIGH);
- } else if (command == "norgb") {
- digitalWrite(RED, LOW);
- digitalWrite(GREEN, LOW);
- digitalWrite(BLUE, LOW);
- }
- }
-
- if (millis() - interval > door_opened_millis) { // current time - face recognised time > 5 secs
- //digitalWrite(relay_pin, LOW); //open relay
- }
-
- fb = esp_camera_fb_get();
-
- if (g_state == START_DETECT || g_state == START_ENROLL || g_state == START_RECOGNITION)
- {
- out_res.net_boxes = NULL;
- out_res.face_id = NULL;
-
- fmt2rgb888(fb->buf, fb->len, fb->format, out_res.image);
-
- out_res.net_boxes = face_detect(image_matrix, &mtmn_config);
-
- if (out_res.net_boxes)
- {
- if (align_face(out_res.net_boxes, image_matrix, aligned_face) == ESP_OK)
- {
-
- out_res.face_id = get_face_id(aligned_face);
- last_detected_millis = millis();
- if (g_state == START_DETECT) {
- client.send("FACE DETECTED");
- }
- if(follow){
- draw_face_boxes(image_matrix, out_res.net_boxes);
- }
- if (g_state == START_ENROLL)
- {
- int left_sample_face = do_enrollment(&st_face_list, out_res.face_id);
- char enrolling_message[64];
- sprintf(enrolling_message, "SAMPLE NUMBER %d FOR %s", ENROLL_CONFIRM_TIMES - left_sample_face, st_name.enroll_name);
- client.send(enrolling_message);
- if (left_sample_face == 0)
- {
- ESP_LOGI(TAG, "Enrolled Face ID: %s", st_face_list.tail->id_name);
- g_state = START_STREAM;
- char captured_message[64];
- sprintf(captured_message, "FACE CAPTURED FOR %s", st_face_list.tail->id_name);
- client.send(captured_message);
- send_face_list(client);
-
- }
- }
-
- if (g_state == START_RECOGNITION && (st_face_list.count > 0))
- {
- face_id_node *f = recognize_face_with_name(&st_face_list, out_res.face_id);
- if (f)
- {
- char recognised_message[64];
- sprintf(recognised_message, "Hi %s", f->id_name);
- open_door(client);
- client.send(recognised_message);
- }
- else
- {
- client.send("FACE NOT RECOGNISED");
- Serial.println("stranger");
- }
- }
- dl_matrix3d_free(out_res.face_id);
- }
- free(out_res.net_boxes->score); // Free allocated memory
- free(out_res.net_boxes->box);
- free(out_res.net_boxes->landmark);
- free(out_res.net_boxes);
- }
- else
- {
- if (g_state != START_DETECT) {
- client.send("NO FACE DETECTED");
- }
- }
-
- if (g_state == START_DETECT && millis() - last_detected_millis > 500) { // Detecting but no face detected
- client.send("DETECTING");
- }
-
- }
-
- client.sendBinary((const char *)fb->buf, fb->len);
-
- esp_camera_fb_return(fb);
- fb = NULL;
- }
- }
- boolean compareString(String a, String b) {
- if (a.length() != b.length() + 1) {
- return false;
- }
- for (int i = 0; i < a.length() - 1; i++) {
- if (a[i] != b[i]) {
- return false;
- }
- }
- return true;
- }
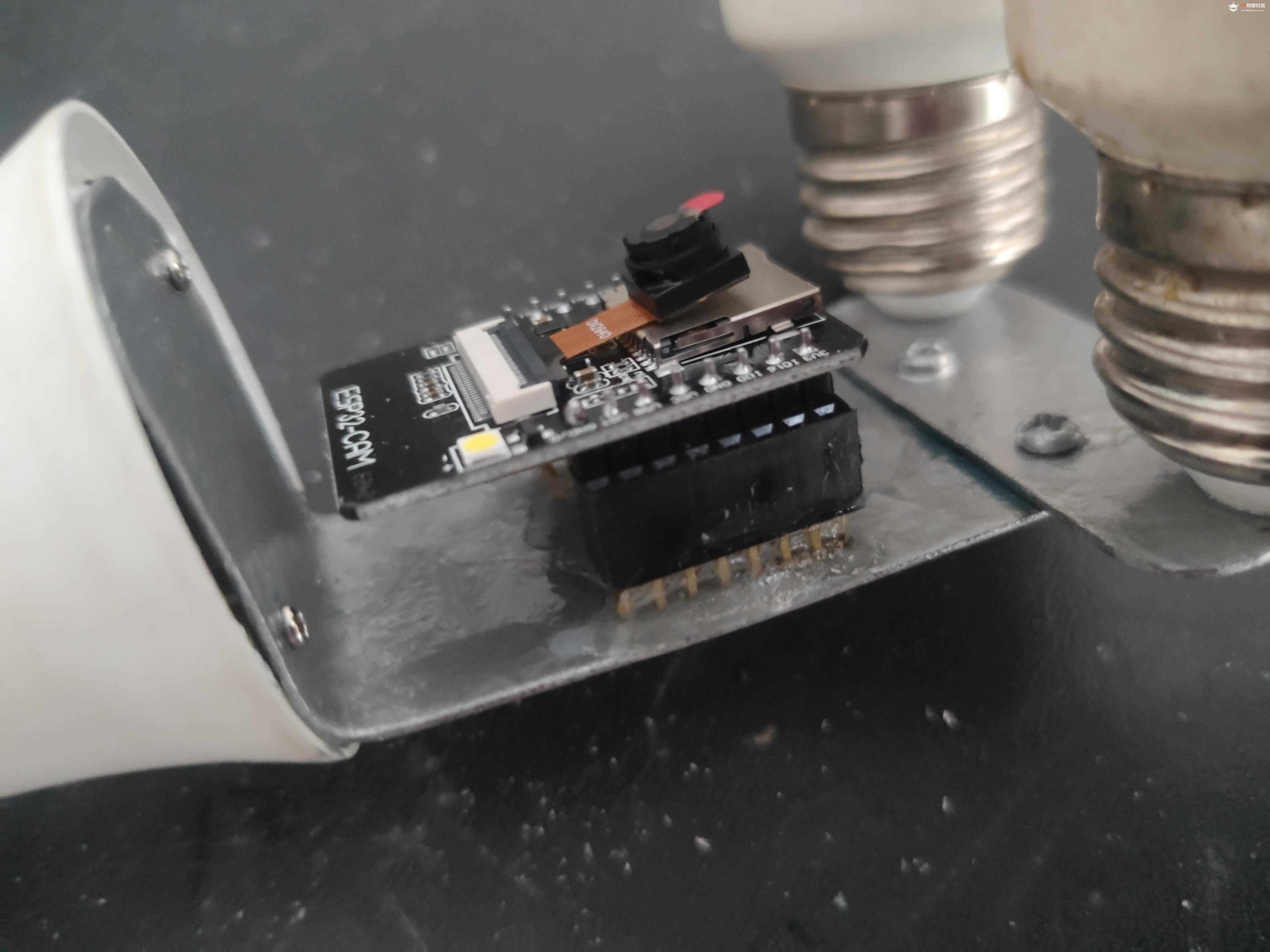
ESP32-CAM 系列:
首先,您需要从开发板管理器安装 ESP32 1.0.4 版本(或其他版本)。然后安装所有缺少的库。将您的板子连接到 USB 到 TTL 转换器。将 GPIO0 连接到 GND 以启用引导模式。从工具中选择 AI Thinker ESP32-CAM 板,然后选择 Huge APP 作为您的分区方案。最后输入 wifi 凭据,选择您的 COM 端口并开始上传程序。
注意:您可能会遇到诸如 guru meditation 或 brownout detector was triggered 之类的错误。它们通常是由电缆连接质量差或电力短缺引起的。为了消除错误,请将板连接到外部电源并确保连接良好。此外,将地线连接到系统和电源也非常重要。
注意:建议您使用 5V 引脚旁边的 GND 引脚为模块供电。
现在,您可以测试您的模块,退出引导模式并重新启动模块。然后用手机或笔记本电脑连接到 ESP32-CAM,并在 chrome 浏览器中输入 192.168.4.1。您应该会看到如图所示的控制面板。灯光和人脸识别功能可以立即进行测试。
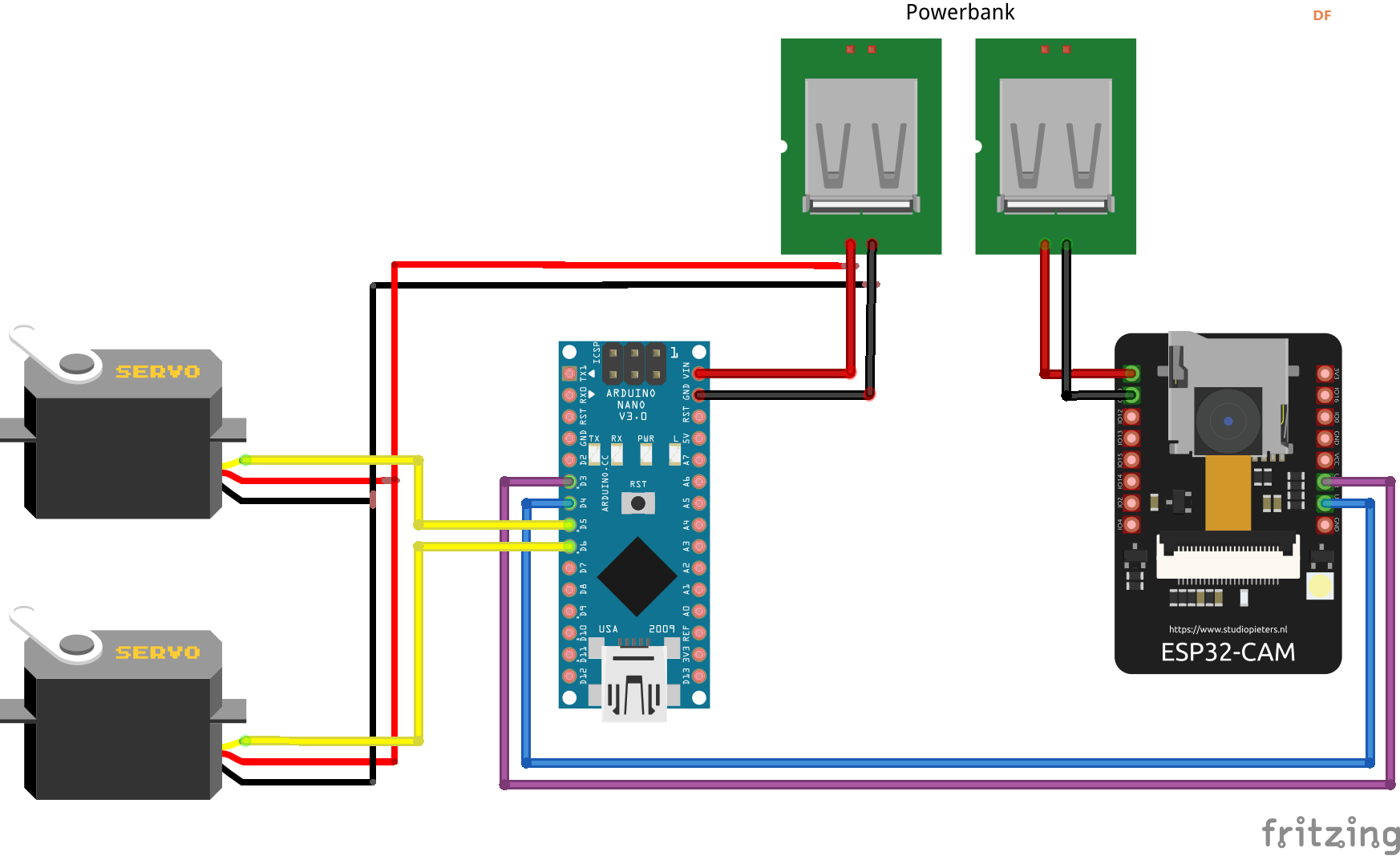
Arduino Nano:
首先安装所有库并从板管理器中选择 arduino nano。选择 COM 并单击 upload (上传)。如果您在上传处理器类型时遇到问题。当处理器设置为 ATmega328P Old Bootloader 时,我可以对我的 arduino nanos 进行编程。
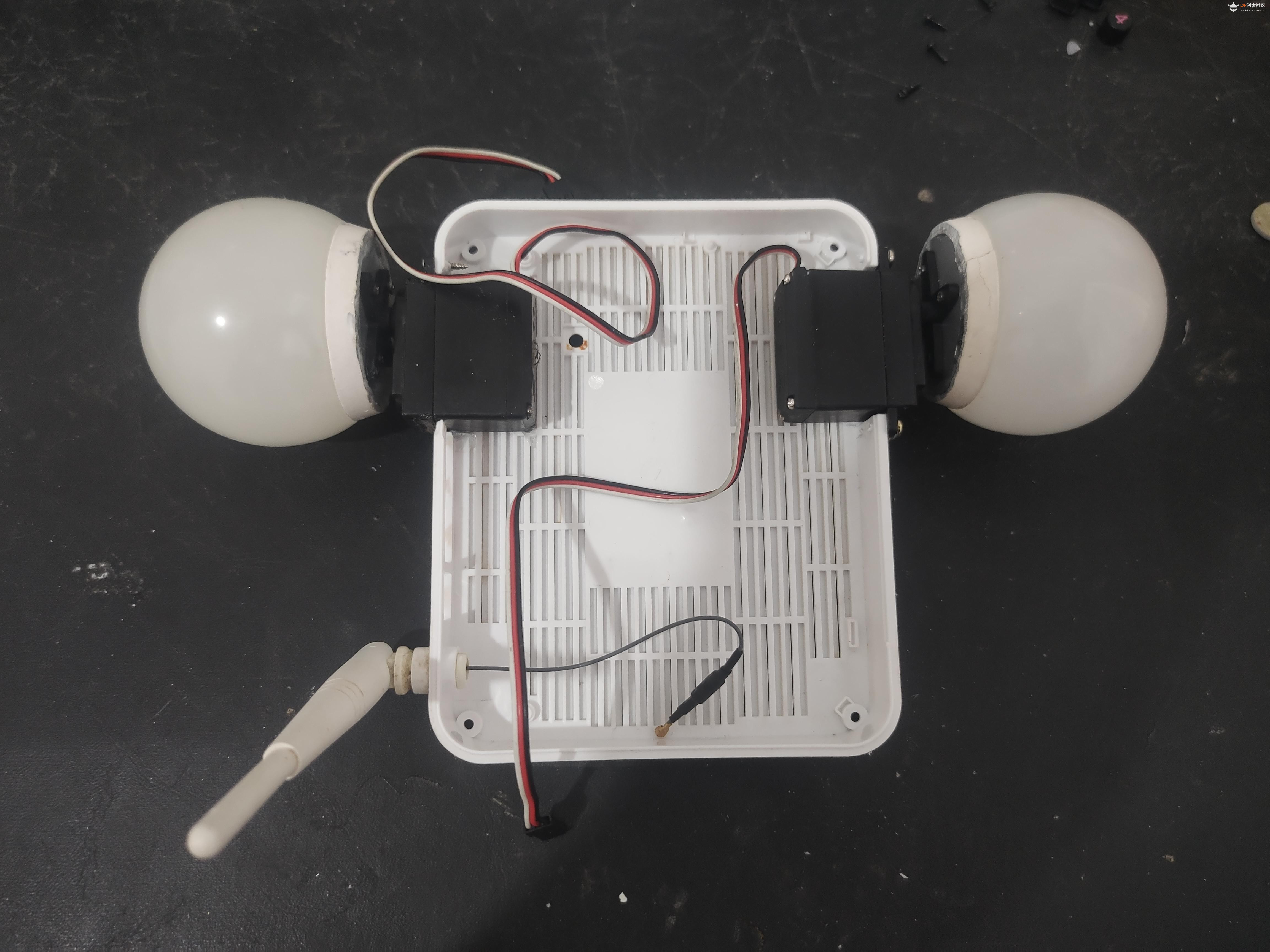
现在您可以将轮子连接到框架上,两个在伺服系统上,一个在后面,以保持平衡。现在我们已经完成了这个项目!
享受你的机器人。
|




















 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






