|
1476| 0
|
[项目] 【Arduino 动手做】具有Wi-Fi通信功能的坦克驱动机器人 |
|
欢迎来到我们的 Instructable,我们将在这里完成制造可作坦克驱动机器人的过程。这个项目是由 2 名高中二年级学生 Kyle 和 Shyamak 制作的。凯尔负责大部分金属加工,而沙马克则负责编程。CAD 是由我们俩完成的。这里的一切都是 100% 从头开始制作的,从 Wi-Fi 接口到金属部件。Driver Station 的代码可以在我的 Github 上找到:Showblown/Personal-Driver-Station:一个使用 websocket 通信与机器人上的 ESP32 通信的 Driver Station。(WIP),CAD 文件可以在以下 Onshape 链接中找到:https://cad.onshape.com/document ... 94ca0927df0e9bb3a1f 用品 您需要的材料是: 10 英尺 0.125“ x 2” x 1.5“ 金属型材 钣金 铆钉 12v摩托车电池 Arduino Mega(任何 ATMega2560 板都可以工作) ESP32(任何型号都可以,但我使用的是 ESP32-WROOM-32E) 面包板(如果您的 ESP2 很大,最好是 32 个) 一个 3.3v 到 5v 逻辑移位器(仅当您的 2 块板在不同的电压下工作时) WCP 单级变速箱(5:1 传动比,但您可以调整) 2 个 12v CIM 电机(您可以使用与您正在使用的变速箱兼容的任何电机)CIM 电机 - VEX Robotics 2 个电机控制器(我们使用 CTRE 的 Sparks,但您可以使用任何支持 PWM 的控制器) 保险丝盒/PDH(我们用了这个:Amazon.com:WUPP 12 伏保险丝盒,带 LED 警告指示灯防潮盖的防水船用保险丝面板,6 个带负极总线保险丝盒的电路,用于汽车船用房车卡车 DC 12-24V:汽车) Omni Wheels(我们的轮子来自 Omni-Directional Wheels - VEX Robotics) 在大一开始时,我们俩(Kyle 和 Shyamak)都加入了一个名为 The Circuit Breakers 的机器人团队,团队编号为 3189。这是第一届机器人竞赛下的一支队伍,全世界数千支高中队在这项比赛中竞争,看看谁拥有那个赛季最好的机器人。我们俩都是与机器人相关的任何事物的新手,我们被比赛的挑战和兴奋所吸引。随着赛季的进行,我们成为了朋友,当我们的构建赛季结束时,我们想构建自己的机器人来模仿我们构建团队机器人的经验。 在我们制作自己的机器人之前,我们参与了为我们团队参加的比赛制作机器人。由于我们之前都没有机器人技术经验,因此学习机器人设计的基础知识是一个陡峭的学习曲线。Kyle 成为团队的一名电工,为机器人接线电机和编码器等,而 Shyamak 则成为一名程序员,使电机移动并实施转向驱动器等先进机制(尽管这不在我们创建的机器人上)。对于我们俩来说,加入团队是一次令人筋疲力尽但有趣的经历,需要在我们的实验室集思广益、原型设计和完善想法。通过这个过程,我们都发现我们的技能是相辅相成的,Kyle 在布线和电子方面的知识与 Shyamak 的编程技能相结合。 虽然在团队比赛中我们没有获胜,但创造机器人并能够在明年再次尝试的经验是无价的。我们学到了很多已知的东西,随着构建季节的结束,我们决定创建我们自己的个人项目——在我们团队几乎没有帮助的情况下创建我们自己的机器人,作为一个简单的机器人,让我们以后可以制作更复杂的机器人。这个项目既具有挑战性又有益,我们能够在 FIRST 及其合作伙伴创建的泡沫之外练习我们的机器人技能,例如 Shyamak 能够编写不使用 WPI 库的机器人,而 Kyle 必须使用电线、电池和 PDH 等未在 FIRST 中使用的东西。 这个机器人只是我们未来将要做的众多项目中的第一个,我们打算使用转向驱动器制造机器人,这是一种全向机器人,可以向任何方向移动而无需旋转,尽管它比该机器人中使用的传统坦克驱动器要困难得多。我们俩,Kyle 和 Shyamak,在对机器人技术的热情的推动下,都必须克服新事物并作为一个团队工作。 介绍 为了处理这个项目,我们将其分为三个主要部分:客户端/电子设备、布线和机器人端。在机器人方面,我们从机器人框架开始,它是支撑电机和轮子的基础,使机器人能够运动。 我们最初的步骤是利用 Onshape,这是一个 3D CAD 程序,可以随时访问在线零件设计。Onshape 还提供了为 CNC 加工生成 G&M 代码的能力,促进零件的精确制造。 然而,由于资源有限,我们选择使用传统工具手动制造零件,包括带锯、钻头、带式砂光机、锤子以及钻头和丝锥套件。这些基本工具使我们能够塑造和组装机器人所需的组件。 最后一步是将所有东西连接在一起。我们在机器人上放置了一块有机玻璃面板,在那里我们存放了所有电子设备。我们的 12v 电池连接到我们的 PDH,其中有两个电机控制器连接到它。这些通过前面步骤中提供的引脚排列连接到 Arduino Mega。您还需要一个移动电源来连接 PCB,并且您可以通过 USB 将其连接到任何一个 PCB,因为供电的 PCB 为另一个供电。有关参考,请参阅此步骤所附的图像。祝贺!您刚刚制造了一个最先进的机器人。 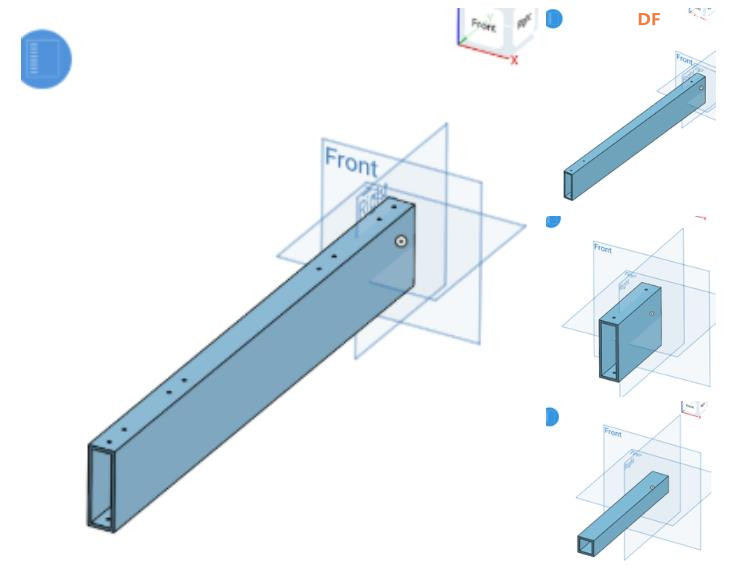 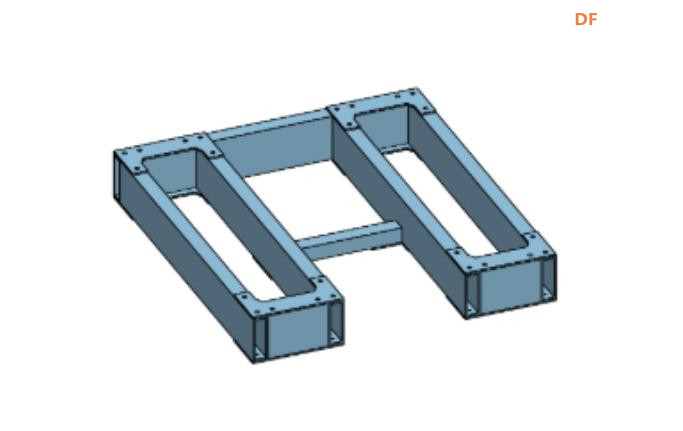  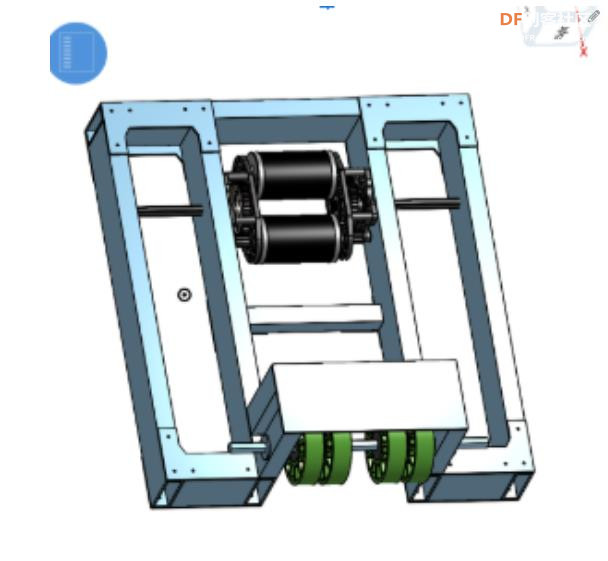  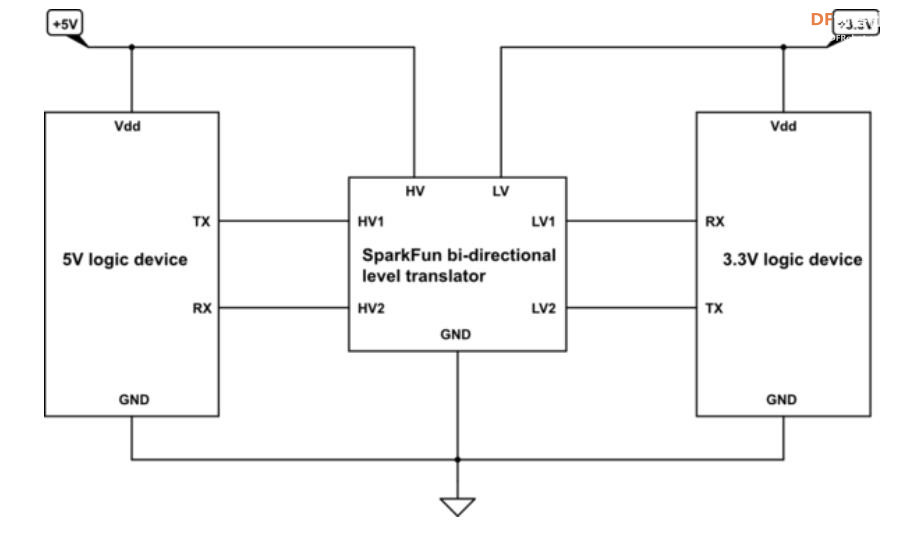 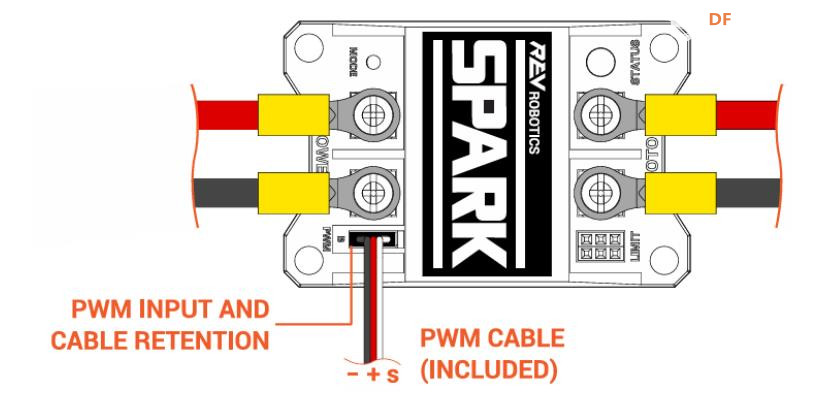 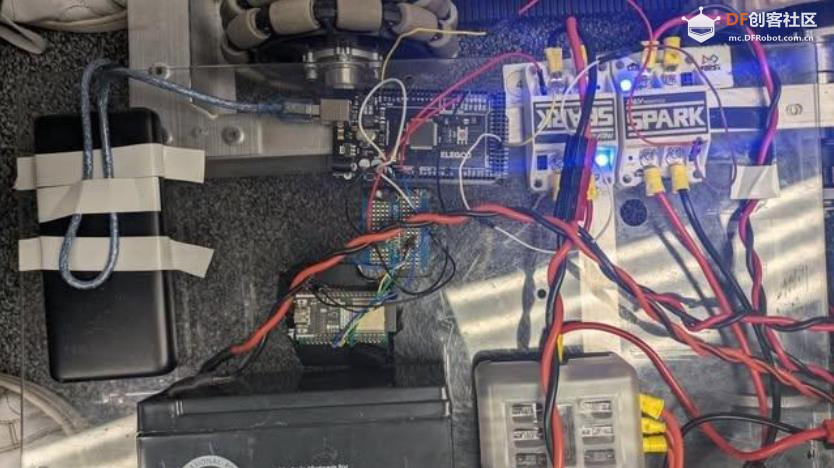 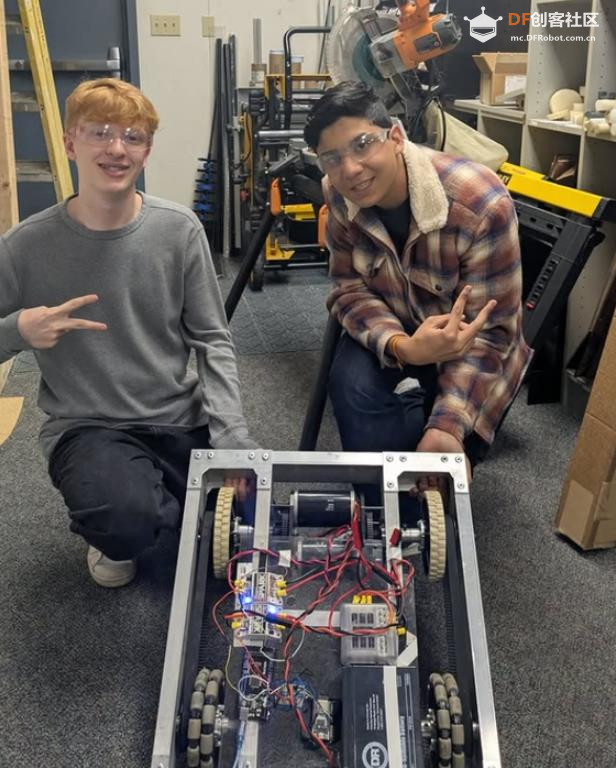 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






