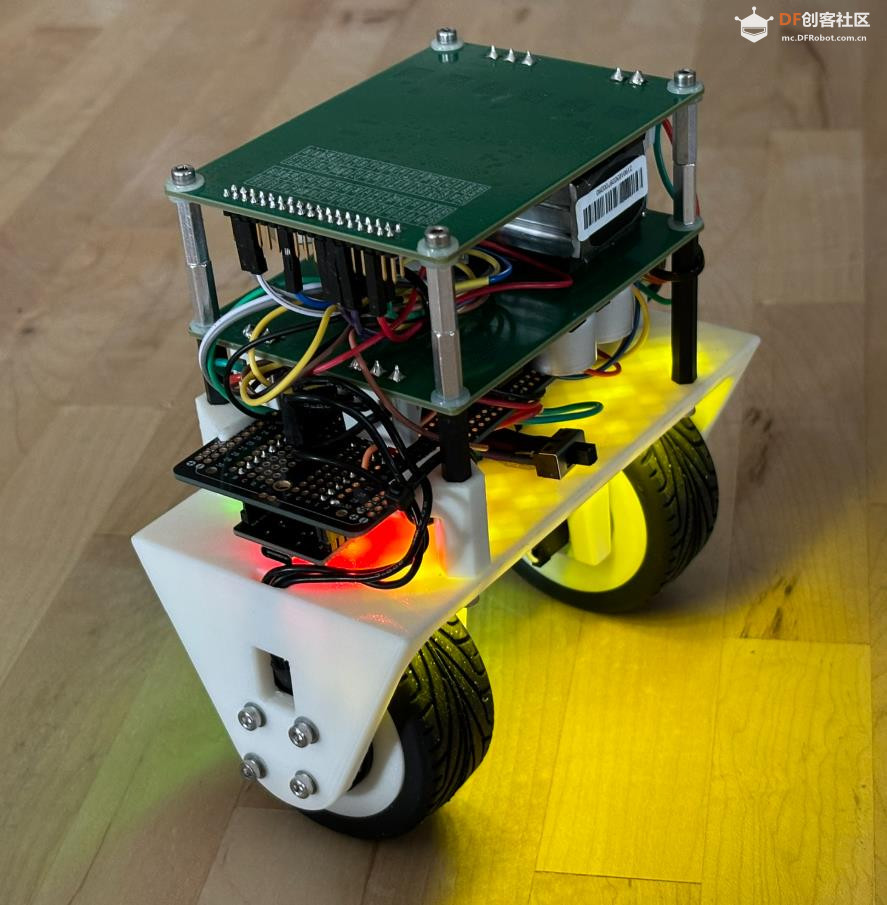
项目代码
- ////////////////////////////////////////////////////////////// IMU //////////////////////////////////////////////////////////////
- #include <Adafruit_Sensor.h>
- #include <Adafruit_MPU6050.h>
- #include <Wire.h>
- #include <Kalman.h> // Source: https://github.com/TKJElectronics/KalmanFilter
-
- Adafruit_MPU6050 mpu;
-
- // accel
- float ax_float, ay_float, az_float;
- float ax_error, ay_error, az_error; // error of linear acceleration
-
- // gyro
- float wx, wy, wz; // rad/s
- float wx_error, wy_error, wz_error;// rad/s
- Kalman kalmanY; // Create the Kalman instances
- double p_kf=0;
- uint32_t timer_kf;
- ////////////////////////////////////////////////////////////// IMU //////////////////////////////////////////////////////////////
- ////////////////////////////////////////////////////////////// Encoder //////////////////////////////////////////////////////////////
- #include "AS5600.h"
-
- AS5600 as5600_0(&Wire);
- AS5600 as5600_1(&Wire1);
-
- ////////////////////////////////////////////////////////////// Encoder //////////////////////////////////////////////////////////////
-
- void setup() {
- Serial.begin(460800);
- Serial.println("开始初始化");
-
- AS5600_setup();
- mpu6050_setup();
-
- Serial.println("初始化完成");
-
- }
-
- void loop() {
- // 读取AS5600传感器的角度
- float angle0 = float(as5600_0.readAngle())/4096*2*M_PI;
- float angle1 = float(as5600_1.readAngle())/4096*2*M_PI;
-
- // 输出数据到串口
- Serial.print("Ang 1: ");
- Serial.print(angle0);
- Serial.print("\tAng 2: ");
- Serial.print(angle1);
- read_mpu6050_angle_loop();
- Serial.println();
-
- delay(4);
- }
-
- ////////////////////////////////////////////////////////////// Encoder //////////////////////////////////////////////////////////////
- void AS5600_setup(){
- Wire.begin(21, 22); // SDA=21, SCL=22
- Wire1.begin(19, 23); // SDA=19, SCL=23
-
- if (!as5600_0.begin()) {
- Serial.println("No 1 AS5600 Found");
- while (1);
- }
- if (!as5600_1.begin()) {
- Serial.println("No 2 AS5600 Found");
- while (1);
- }
-
- }
-
- ////////////////////////////////////////////////////////////// Encoder //////////////////////////////////////////////////////////////
- ////////////////////////////////////////////// IMU //////////////////////////////////////////////
- void mpu6050_setup(){
- Serial.flush();
- delay(2500);
- mpu6050_start();
-
- delay(2000);
-
- read_accel_gyro_raw();
- ax_float-=ax_error;
- ay_float-=ay_error;
- az_float-=az_error;
-
- double pitch=atan(-1*ax_float/sqrt(sq(ay_float)+sq(az_float)));
-
- kalmanY.setAngle(pitch); // Set starting angle
-
- timer_kf = micros();
- }
-
- void mpu6050_start(){
- // Try to initialize!
- Serial.println("MPU6050 Start");delay(1000);
- // DO NOT USE: if (!mpu.begin()) {
- // USE: ↓↓↓↓↓↓↓↓↓↓↓↓
- if (!mpu.begin(0x68,&Wire)) {
- Serial.println("Failed to find MPU6050 chip");
- while (1) {
- delay(10);
- }
- }
- Serial.println("MPU6050 Found!");
-
- mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
- Serial.print("Accelerometer range set to: ");
- switch (mpu.getAccelerometerRange()) {
- case MPU6050_RANGE_2_G:
- Serial.println("+-2G");
- break;
- case MPU6050_RANGE_4_G:
- Serial.println("+-4G");
- break;
- case MPU6050_RANGE_8_G:
- Serial.println("+-8G");
- break;
- case MPU6050_RANGE_16_G:
- Serial.println("+-16G");
- break;
- }
- mpu.setGyroRange(MPU6050_RANGE_500_DEG);
- Serial.print("Gyro range set to: ");
- switch (mpu.getGyroRange()) {
- case MPU6050_RANGE_250_DEG:
- Serial.println("+- 250 deg/s");
- break;
- case MPU6050_RANGE_500_DEG:
- Serial.println("+- 500 deg/s");
- break;
- case MPU6050_RANGE_1000_DEG:
- Serial.println("+- 1000 deg/s");
- break;
- case MPU6050_RANGE_2000_DEG:
- Serial.println("+- 2000 deg/s");
- break;
- }
-
- mpu.setFilterBandwidth(MPU6050_BAND_5_HZ);
- Serial.print("Filter bandwidth set to: ");
- switch (mpu.getFilterBandwidth()) {
- case MPU6050_BAND_260_HZ:
- Serial.println("260 Hz");
- break;
- case MPU6050_BAND_184_HZ:
- Serial.println("184 Hz");
- break;
- case MPU6050_BAND_94_HZ:
- Serial.println("94 Hz");
- break;
- case MPU6050_BAND_44_HZ:
- Serial.println("44 Hz");
- break;
- case MPU6050_BAND_21_HZ:
- Serial.println("21 Hz");
- break;
- case MPU6050_BAND_10_HZ:
- Serial.println("10 Hz");
- break;
- case MPU6050_BAND_5_HZ:
- Serial.println("5 Hz");
- break;
- }
- }
-
- void read_accel_gyro_raw(){
- sensors_event_t a, g, temp;
- mpu.getEvent(&a, &g, &temp);
- ax_float=a.acceleration.x;
- ay_float=a.acceleration.y;
- az_float=a.acceleration.z;
-
- wx=g.gyro.x;
- wy=g.gyro.y;
- wz=g.gyro.z;
- }
-
- void read_mpu6050_angle_loop(){
- read_accel_gyro_raw();
- ax_float-=ax_error;
- ay_float-=ay_error;
- az_float-=az_error;
- wx-=wx_error;
- wy-=wy_error;
- wz-=wz_error;
-
- double dt = (double)(micros() - timer_kf) / 1000000; // Calculate delta time
- timer_kf = micros();
-
- double pitch=atan(ay_float/sqrt(sq(ax_float)+sq(az_float)))*180/M_PI;
- p_kf = kalmanY.getAngle(pitch, wx*180/M_PI, dt); // pitch
- // Serial.print(-50); // To freeze the lower limit
- // Serial.print(" ");
- // Serial.print(50); // To freeze the upper limit
- // Serial.print(" ");
-
- // Serial.print("Pitch: ");
- // Serial.print(p_kf); Serial.print("\t");
- Serial.print("p_kf:");Serial.print(p_kf); Serial.print("\t");
- }
- ////////////////////////////////////////////// IMU //////////////////////////////////////////////
| 







 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






