|
24488| 20
|
[项目] 多脚怪 |

|
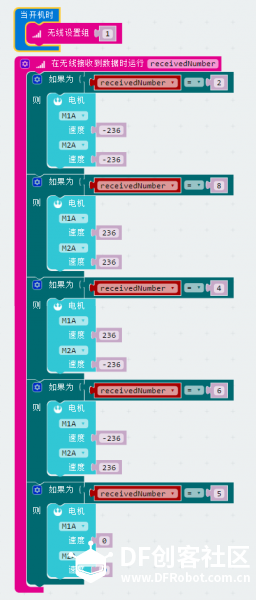
这是我第一次写教程,不当之处请大家多多包涵。 准备器材: robot:bit 1 TT电机 2 风力仿生兽 1 3D打印支架 1 TT电机转接件 2 电池盒 1 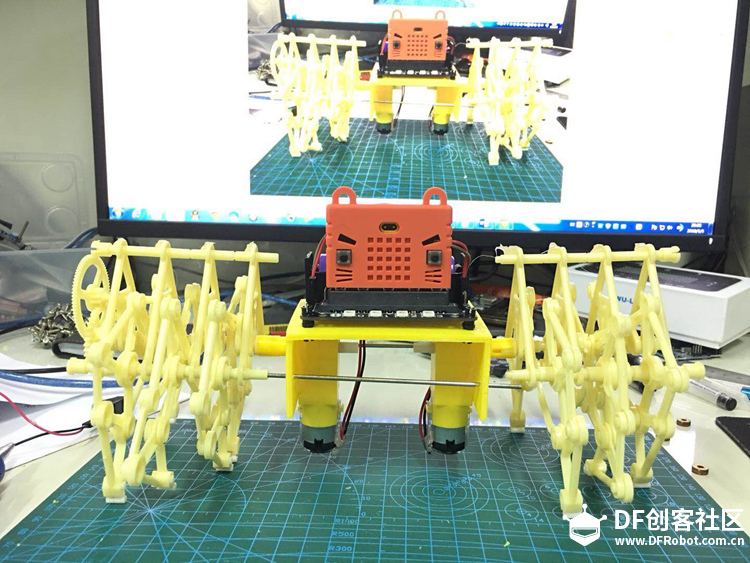 1、设计打印支架和TT电机转接件。 由于本人的3d打印机不是很好,模型打印精度不高,所以有些地方打印出来后可能紧密度不高。 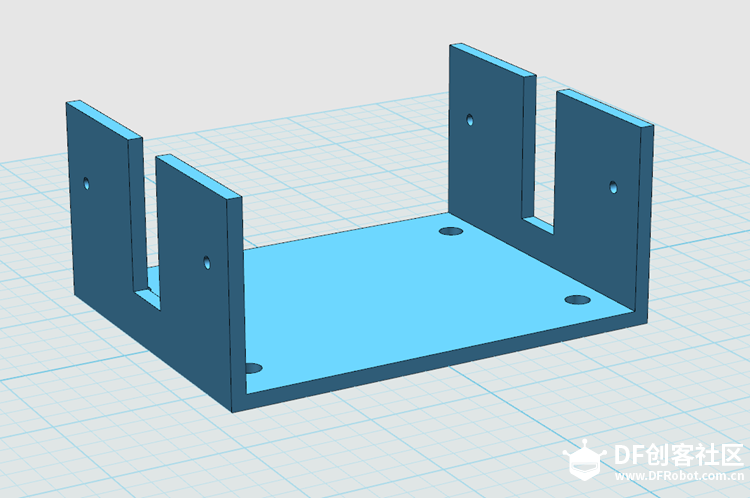 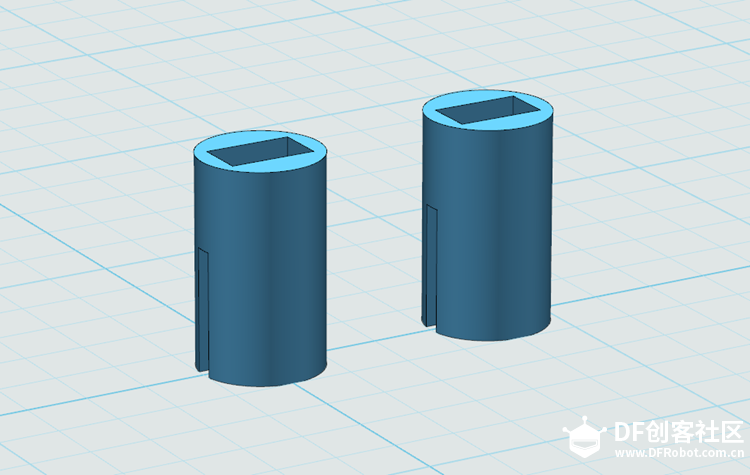 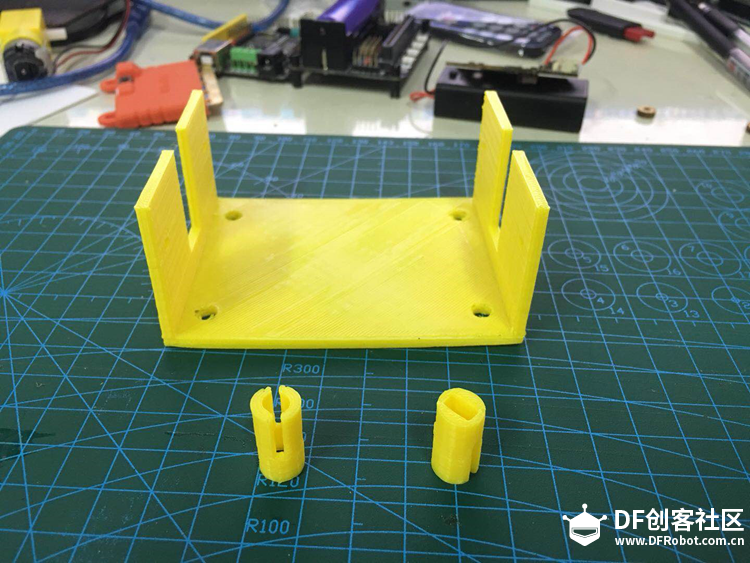 2、脚部组装。 由于设计能力有限,脚部零件是在淘宝上购买的,在淘宝上搜“仿生兽”即可,按上面的说明书组装好,分成左右两部分。   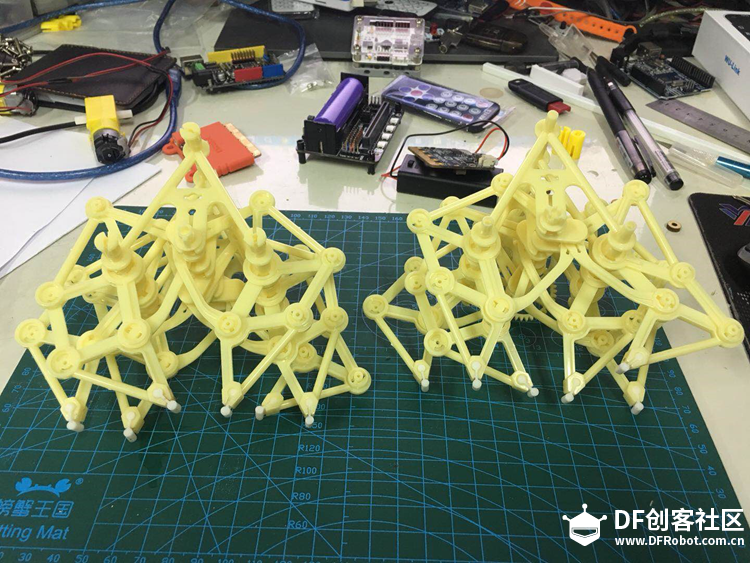 3、组装 将TT电机用热熔胶固定在支架内侧两边。注意TT电机的安装高度,事先可与脚部零件比划一下,确定大致的位置。,由于我在设计支架时没考虑到这个,所以只能在下面调整了。 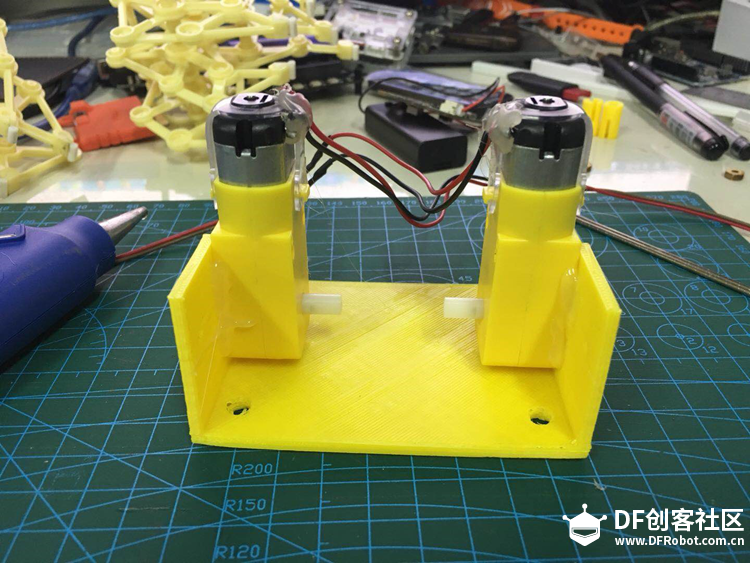 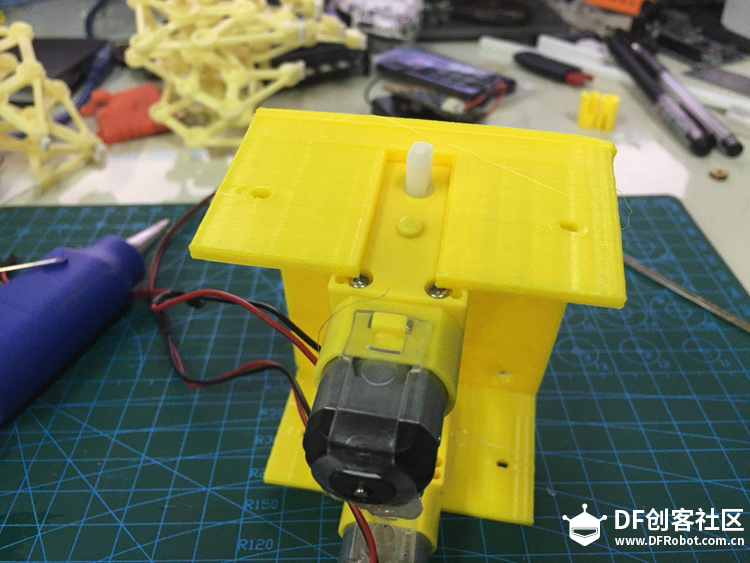 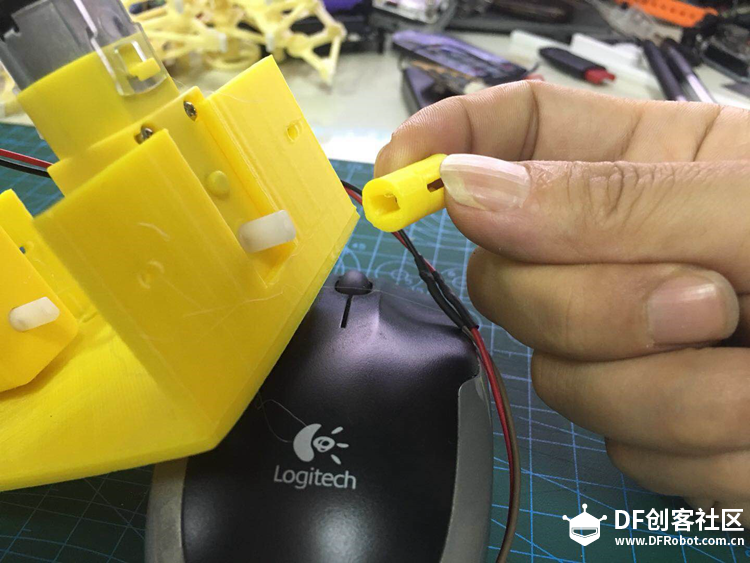 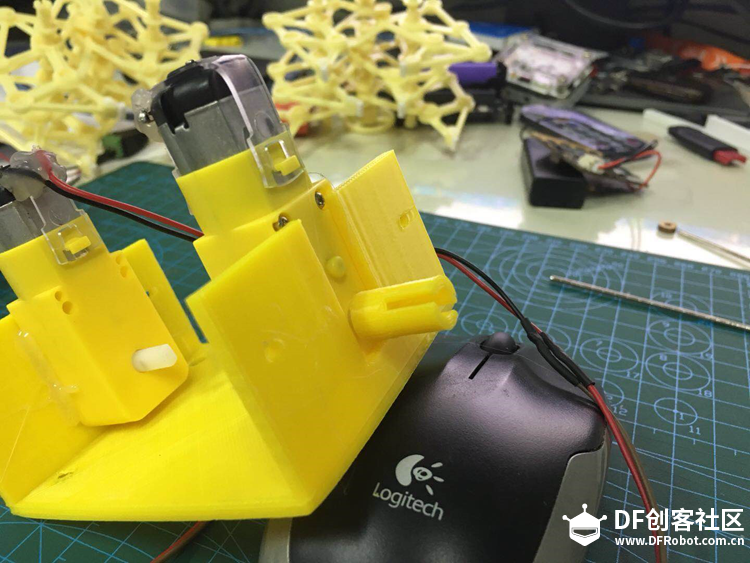 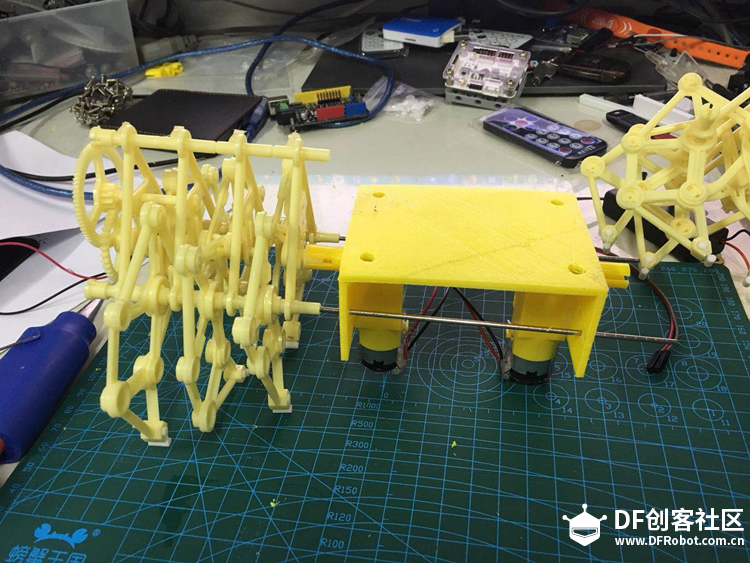 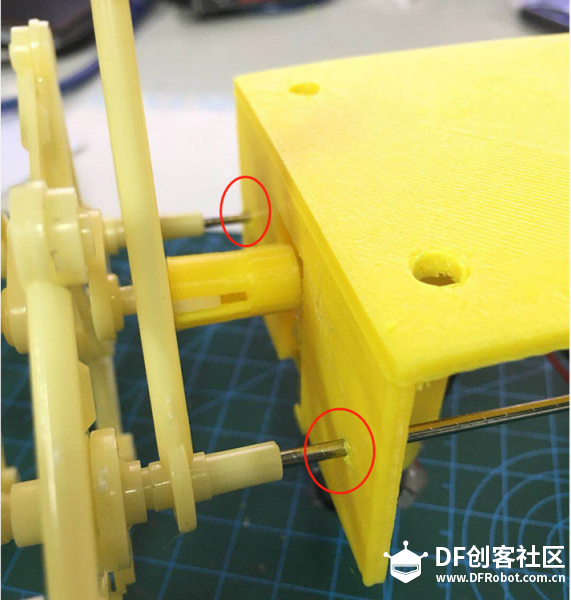 如果位置有偏差,可以用电钻等把支架上红色圈中的孔弄得大些,以便微调。 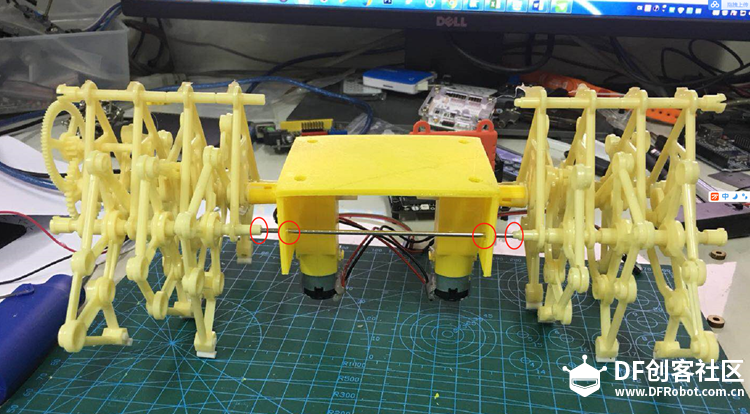 可以用热熔胶在红色圈处固定住,以防止在走动过程中移动或脱落。 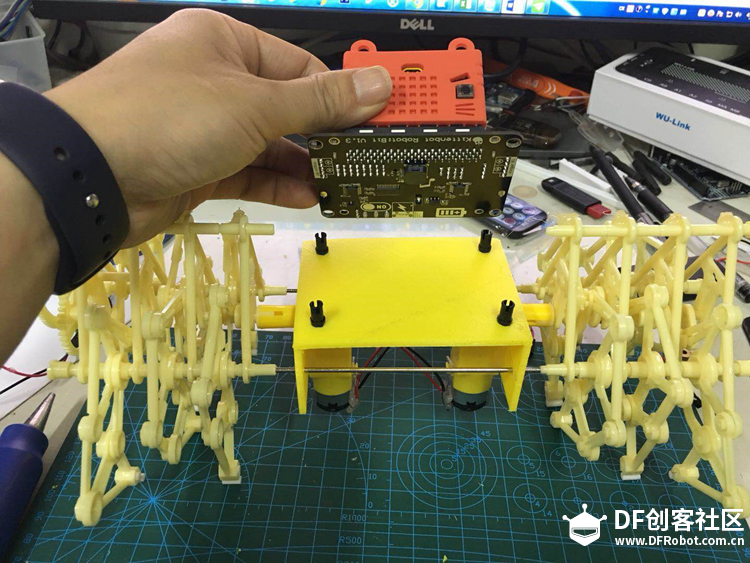 用4个乐高插销把ROBOT:BIT安装在支架上。 最后把两个TT电机与ROBOT:BIT相连,分别接在两边的A+和A-上,这样,组装部分就完成了。 4、程序部分 功能要求:遥控端向前倾斜,多脚怪就向前走;向后倾斜,多脚怪就后退;向左倾斜,就左转;向右倾斜,就右转;水平位置,多脚怪就会停下来。 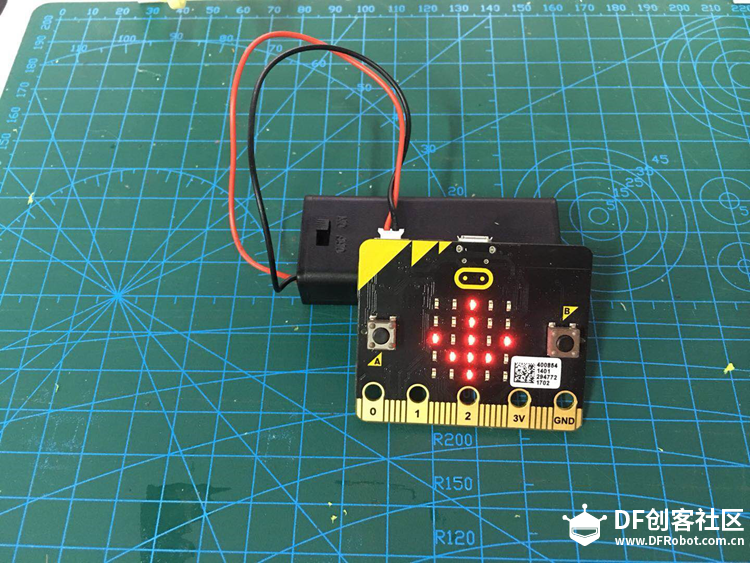 遥控部分程序: 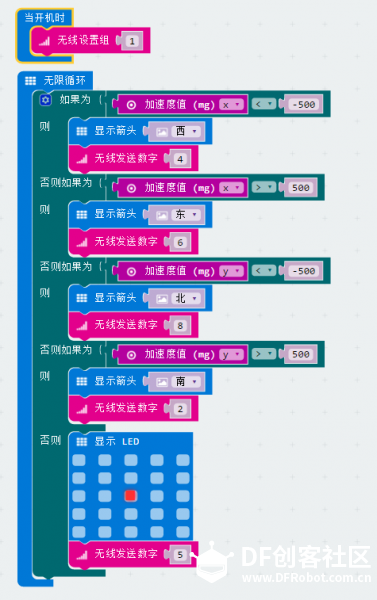 多脚怪主控部分程序: 作者其它帖子 ◆ 小尚,别跟丢了!——自动跟随的麦克纳姆轮小车 https://mc.dfrobot.com.cn/thread-296803-1-1.html ◆ 来吧!一起动手制作一台架子鼓 https://mc.dfrobot.com.cn/thread-289948-1-1.html ◆ 炫彩电子钢琴的设计与制作 https://mc.dfrobot.com.cn/thread-280116-1-1.html ◆ [micro:bit×OBLOQ物联网挑战赛第三轮] 坐姿矫正仪 https://mc.dfrobot.com.cn/thread-269139-1-1.html ◆ 【挑战2】基于物联网的智能闸道、人数统计与安全预警系统 https://mc.dfrobot.com.cn/thread-268643-1-1.html ◆ 物联网比赛第一关:远程监测温度和亮度 https://mc.dfrobot.com.cn/thread-268162-1-1.html ◆ 来来来,让我们一起来打地鼠! https://mc.dfrobot.com.cn/thread-268413-1-1.html |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 谢谢支持,上面的看了,学到很多知识
谢谢支持,上面的看了,学到很多知识



 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖






