|
23290| 14
|
[项目] 萌宠机器人的设计与制作 |

|
纸箱人阿愣由于各个关节灵活自由,有圆圆的眼睛和三角形的嘴巴,时刻露出无辜的表情,让人看到就心软从而获得大量的粉丝。不过他只有一种无辜的表情,如果我们可以自己利用编程让根据不同的场景显示不同的表情或不同表情随时进行切换达到动动态的显示效果,相信会更加打动粉丝们的心。于是我就设计一款萌宠机器人。 【功能描述 】 我们事先通过编程设计一些表情显示图形,通过按键来切换不同的表情或显示一组组动态表情包,加上他的头部和手都可以灵活转动,这样一来在不同的场景下,我们选择相应的表情及姿态,使之与周围环境相融合,从而形成不同的情景场面,我们也可以通过拍摄一组图片或视频来形成一段小动画。 【效果图】 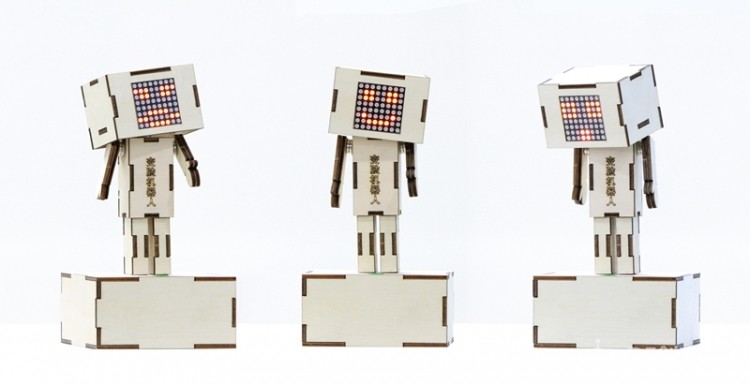 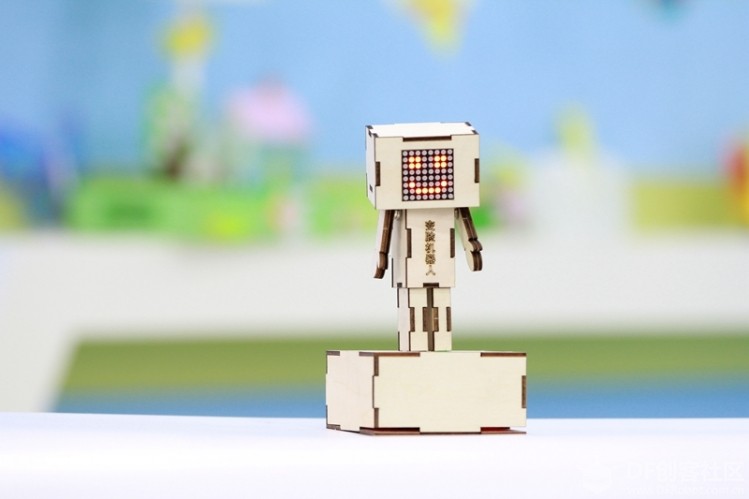 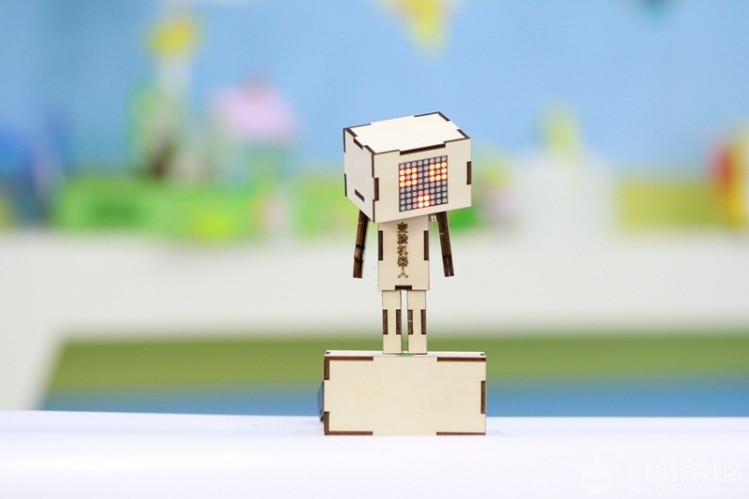 【视频演示】 【硬件清单】
【制作过程】 1、为了使外观更加好看,结构采用椴木板,先在电脑上设计图纸并用激光切割机进行切割。  2、头部组装。 组装时可以用热熔胶或502胶水对连接部分加以巩固。为了使变脸机器的头部可以自由灵活多角度转动,头部与身体的连接部分我采用钢珠与环形磁铁的连接方式,安装点阵显示模块时,我把它倒过来安装,这样可以避免转动时受连接线的影响,不过这样一来在下面写程序的时候要注意表情设计时要倒过来设计。记得在组合时把点阵显示模块的连接线插上,不然安装好后线就不好插了,并在纸上记下五根连接线相对应的针脚名称,在下面与主控板连接和编写程序时要用到。 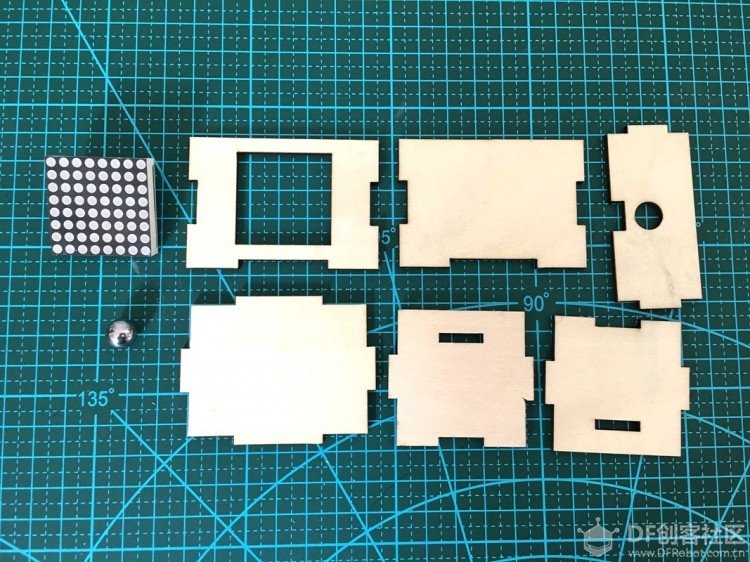 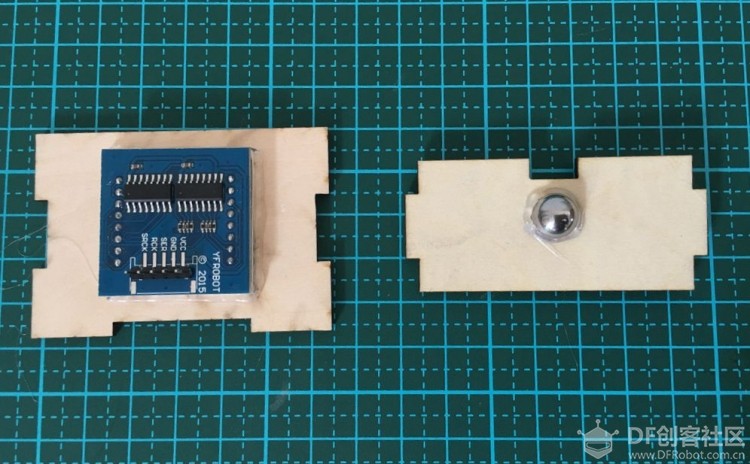  3、身体组装。 安装环形磁铁要注意,朝向的一面尽量凸出来一点,这样头脑的转动角度就会更大。上面穿线问他的槽要朝后,而下面的槽要朝两边,不然等下腿部无法安装。固定的话我是用热熔胶进行固定的。 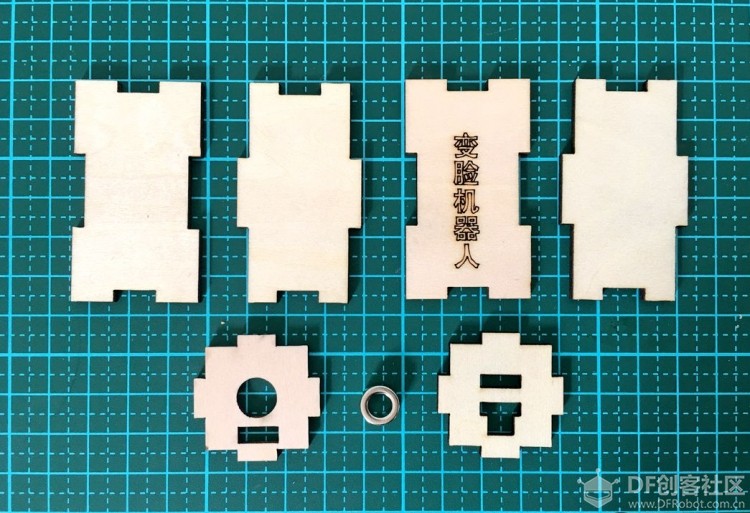 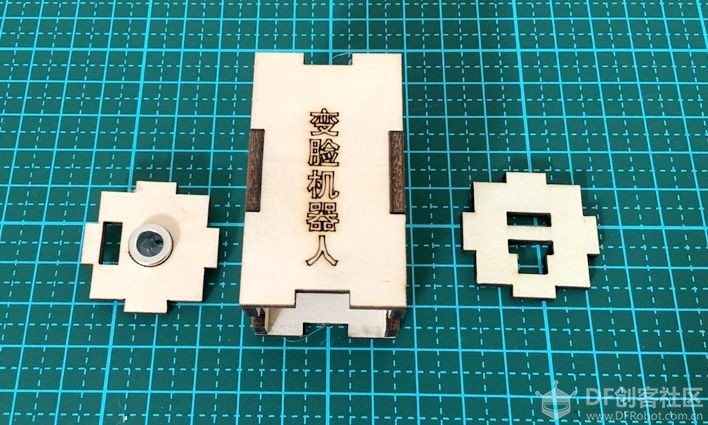  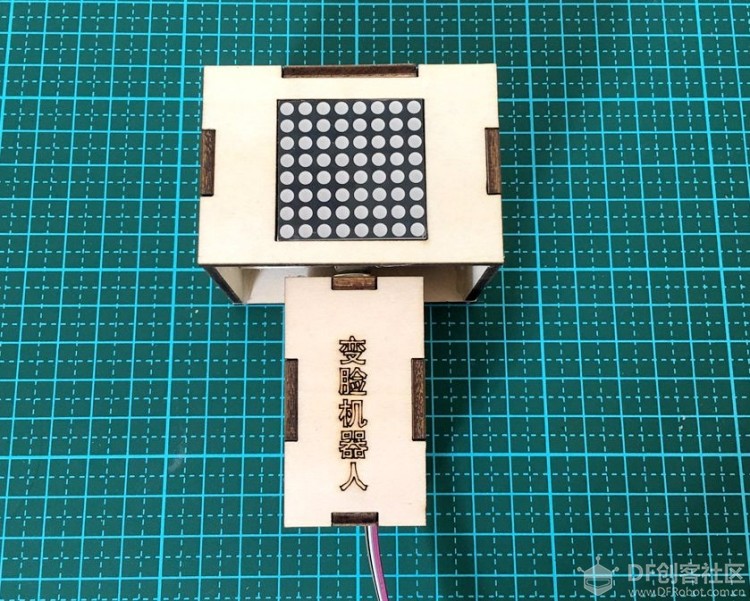 4、腿部组装。 腿部安装时要注意每条腿组合的方向,凸出来的部分要一上一下。组合好后先把线穿过其中一条腿后再把两条腿与身体部分用胶水固定住。 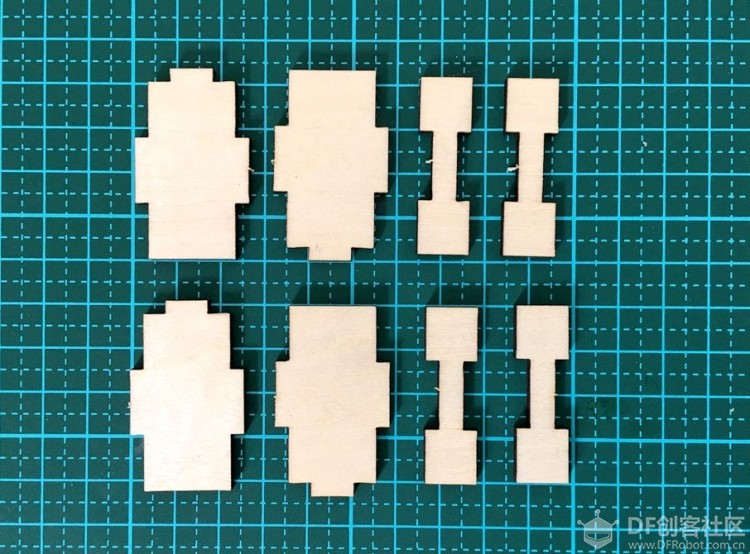 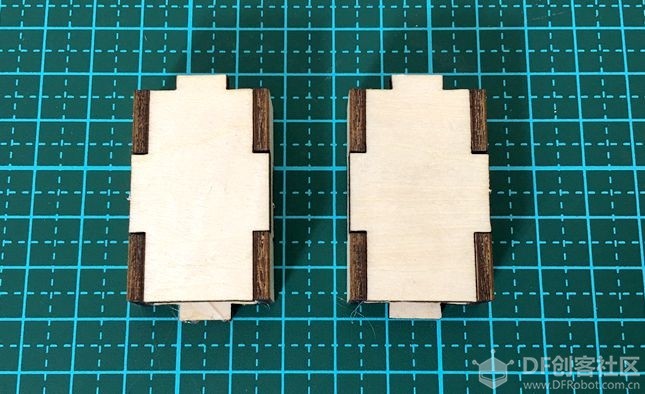  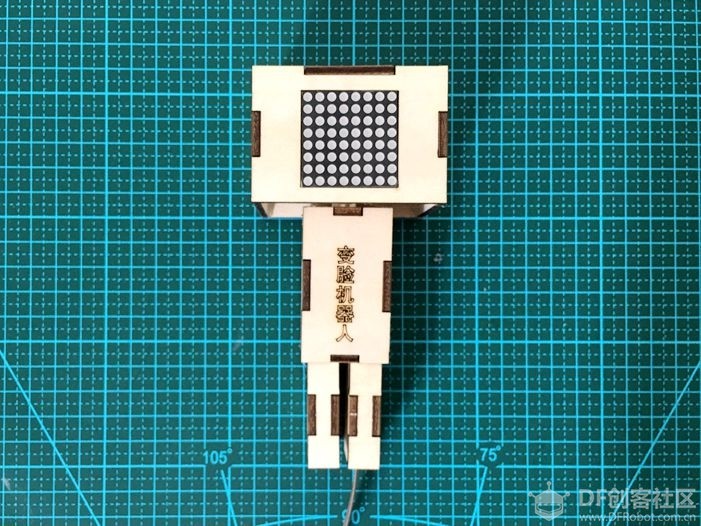 5、底座组装 根据图片所示安装好按钮有底座的四周面板,最后把前面做好的部分固定在底座上。 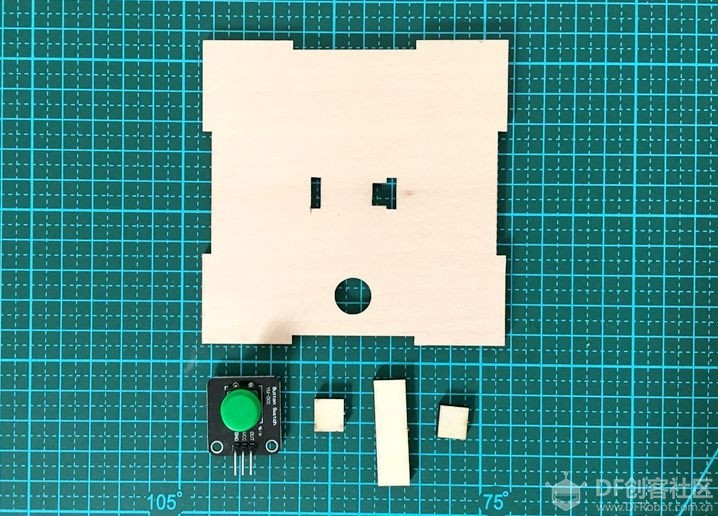   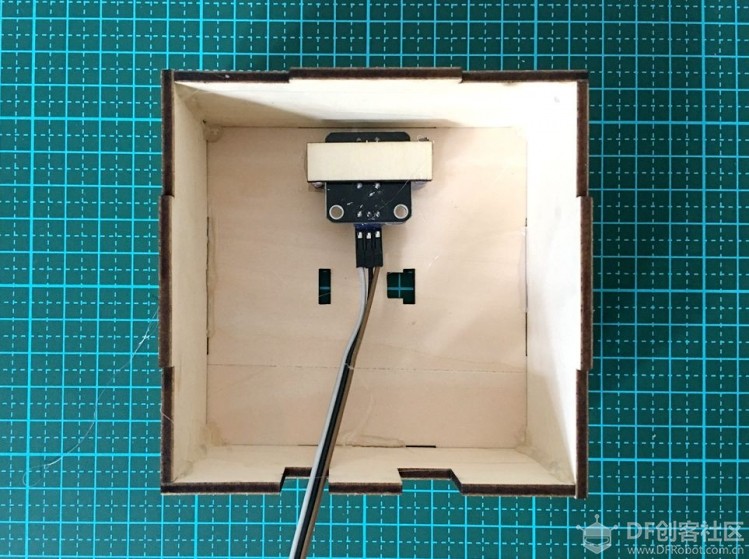 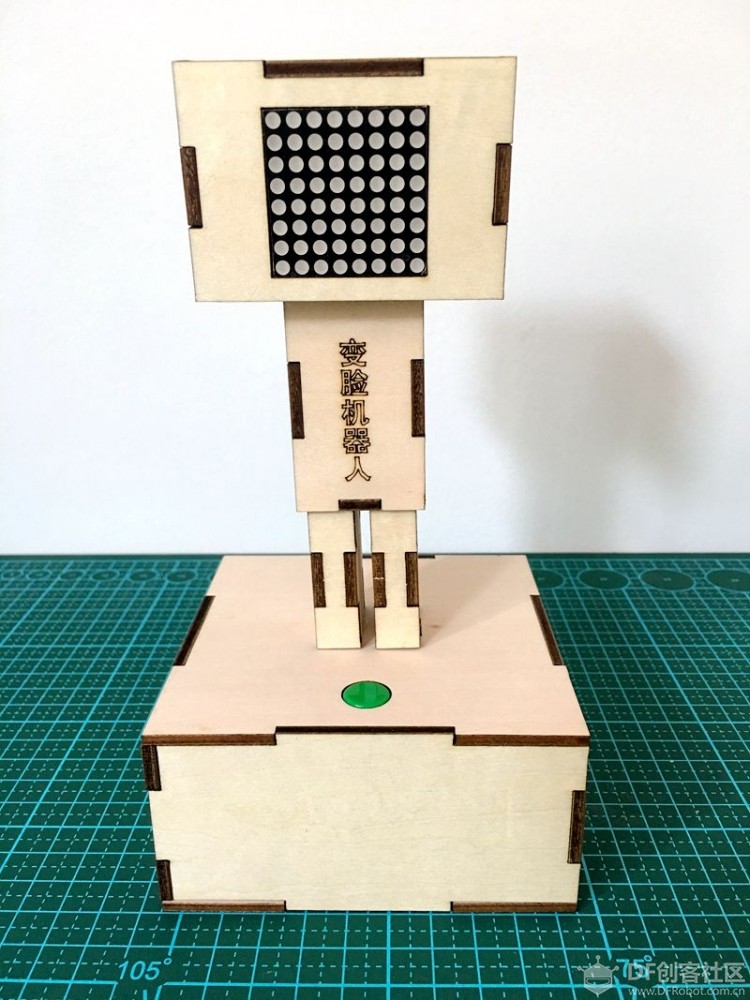 6、手部组装。 手部的与身体的连接是采用分别把两片圆形磁片固定在手上和身体上,通过磁片的吸力固定和转动的,所以在手部安装过程中要注意磁片的安装方向,首先确定身体上磁片的安装方向,使身体上的磁片与身体顶部中间的环形磁铁要相吸,这样利于固定的牢度,然后再确定手部磁片的安装方向。 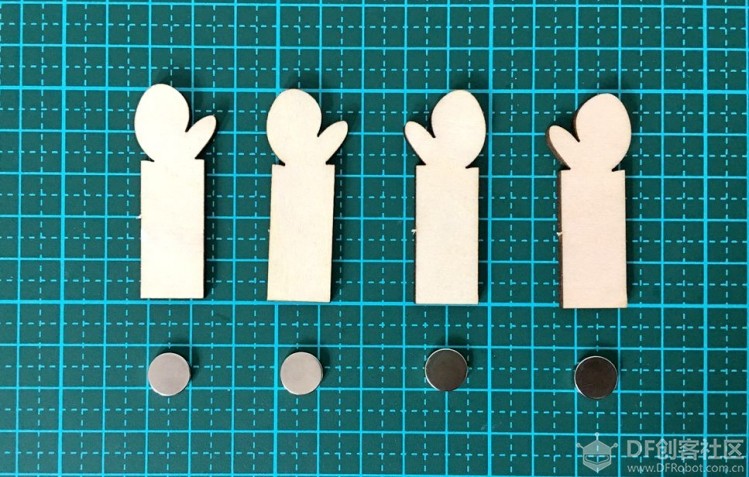  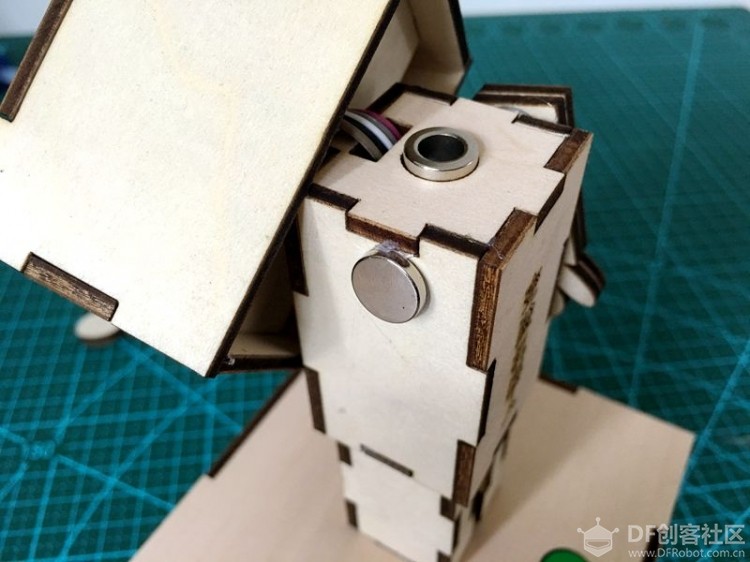 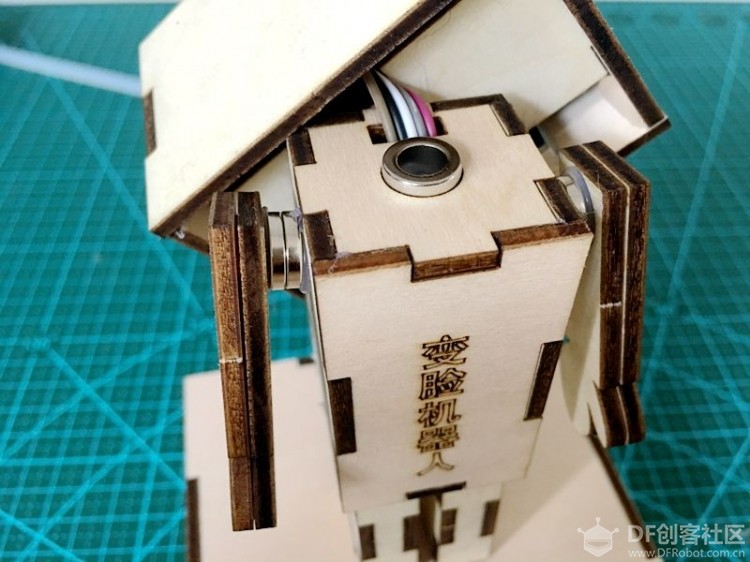 7、主控板安装及线路连接。 把主控板固定在底板上,并连接好线路,把底板与做好的部分固定住。 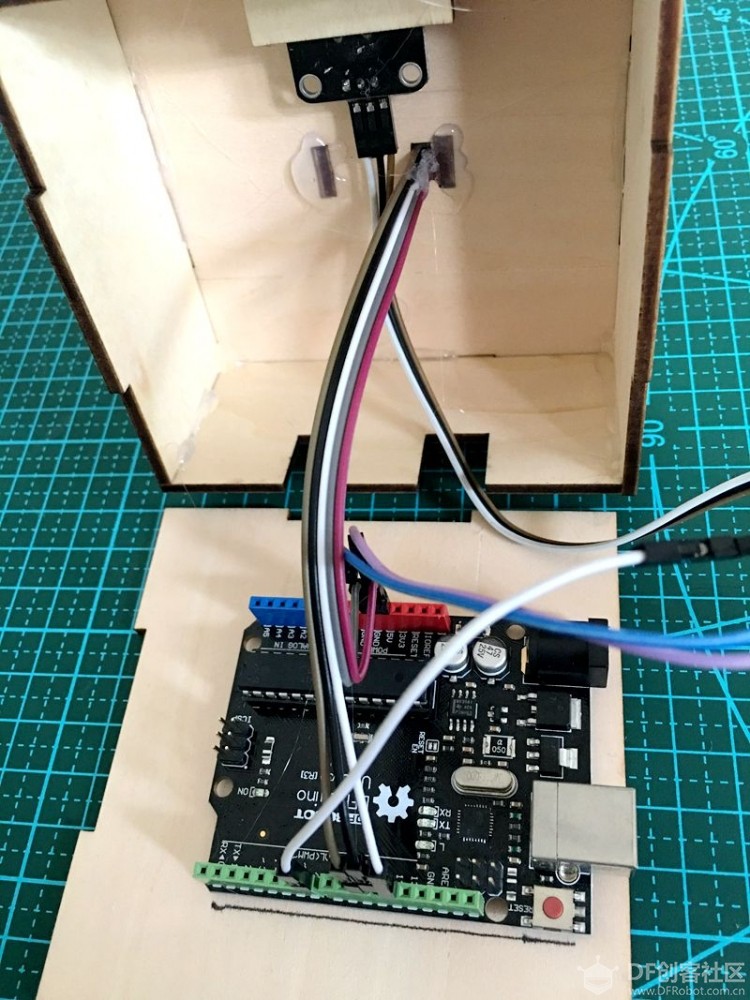 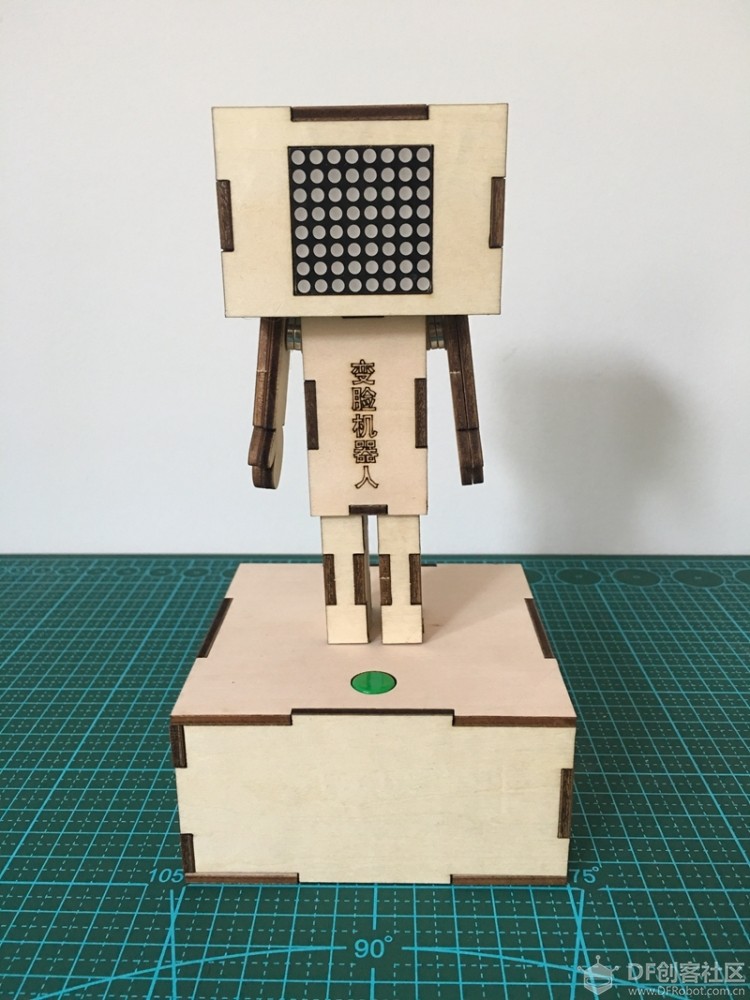 8、接线图。 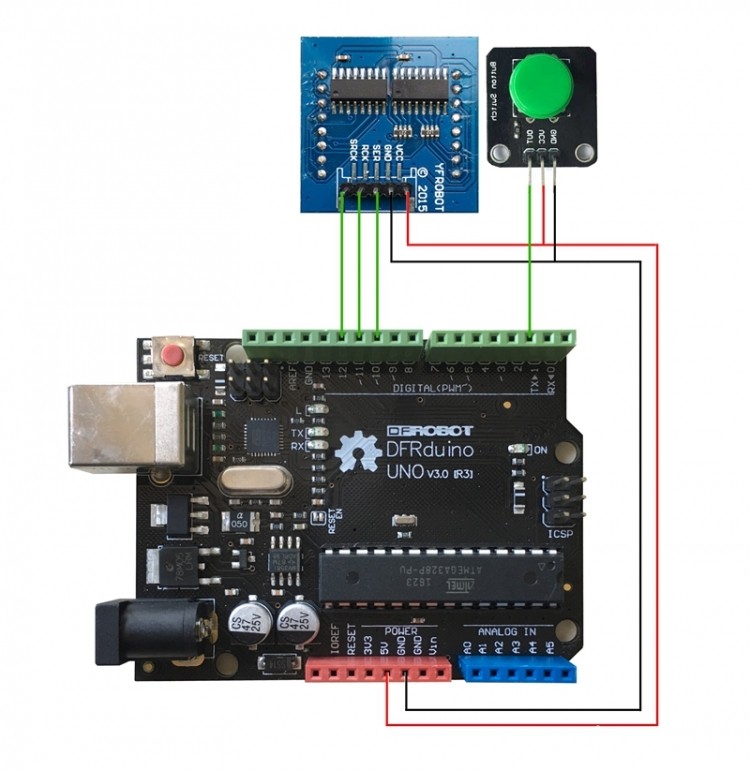 9、程序编写。 程序编写的在米思齐软件上进行编写的。显示表情的8*8点阵我是用YFROBOT,利用米思齐软件提供了相应的库文件,利用它可以简单方便的编写出程序。由于受版面的限制,我只编写了两个表情,通过按键来进行切换,大家可以发挥想像,编写出各样各样的静态表情及动态表情。简化程序如下: 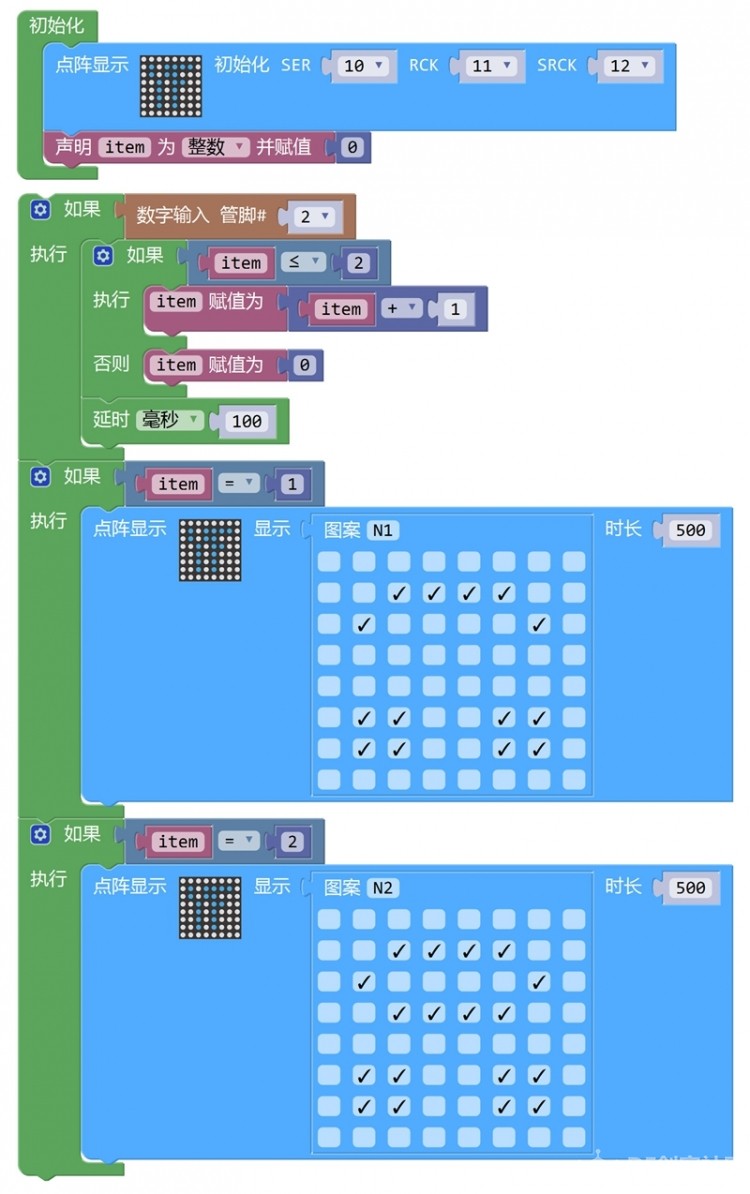 作者其它帖子 ◆ 小尚,别跟丢了!——自动跟随的麦克纳姆轮小车 https://mc.dfrobot.com.cn/thread-296803-1-1.html ◆ 来吧!一起动手制作一台架子鼓 https://mc.dfrobot.com.cn/thread-289948-1-1.html ◆ 炫彩电子钢琴的设计与制作 https://mc.dfrobot.com.cn/thread-280116-1-1.html ◆ 萌宠机器人的设计与制作 https://mc.dfrobot.com.cn/thread-275978-1-1.html ◆ [micro:bit×OBLOQ物联网挑战赛第三轮] 坐姿矫正仪 https://mc.dfrobot.com.cn/thread-269139-1-1.html ◆ 【挑战2】基于物联网的智能闸道、人数统计与安全预警系统 https://mc.dfrobot.com.cn/thread-268643-1-1.html ◆ 物联网比赛第一关:远程监测温度和亮度 https://mc.dfrobot.com.cn/thread-268162-1-1.html ◆ 来来来,让我们一起来打地鼠! https://mc.dfrobot.com.cn/thread-268413-1-1.html |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 精致
精致

 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖






