本帖最后由 RRoy 于 2025-9-2 16:32 编辑
这周给大家分享一款硬核的机器人——HydroBot。

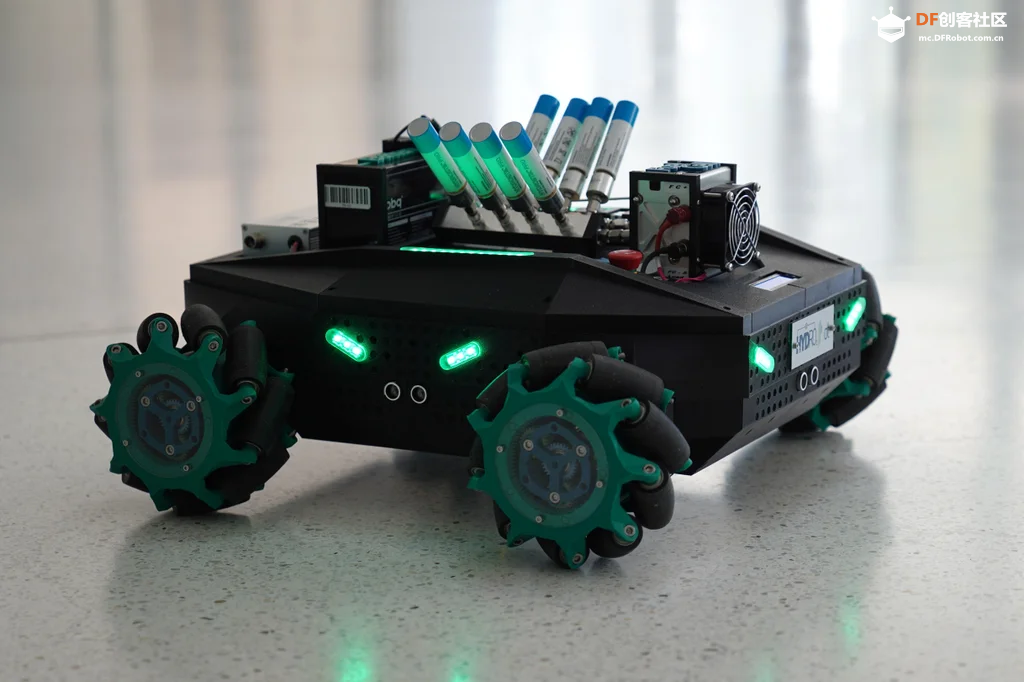
它由德国海姆霍兹埃朗根-纽伦堡可再生能源研究所(HI ERN)的研究团队打造,不仅是一台普通的遥控小车,也是一个展示未来能源技术——氢燃料电池的移动演示平台。
为何选择燃料电池?
作为一辆“燃料电池电动车”(FCEV),HydroBot的核心动力来源是氢燃料电池电堆,而不是传统的锂电池。这不禁让人好奇,既然锂电池如此普及,为何还要大费周章地使用燃料电池呢?

作者对此给出了解答:燃料电池与电池最大的区别在于,它的“燃料箱”和“发动机”是分离的。这意味着,增加机器人的续航里程(增大燃料箱)并不会增加其峰值功率(增大电堆尺寸),这为设计带来了更多灵活性。尤其在追求长续航时,相比于不断增加电池容量带来的重量和成本,使用燃料电池会是更高效的选择。
下面几张图展示了燃料电池车的概念。
系统待机与监控
车载电子设备(芯片图标)监控氢气存储罐、燃料电池和电池的状态,并确保系统安全运行。
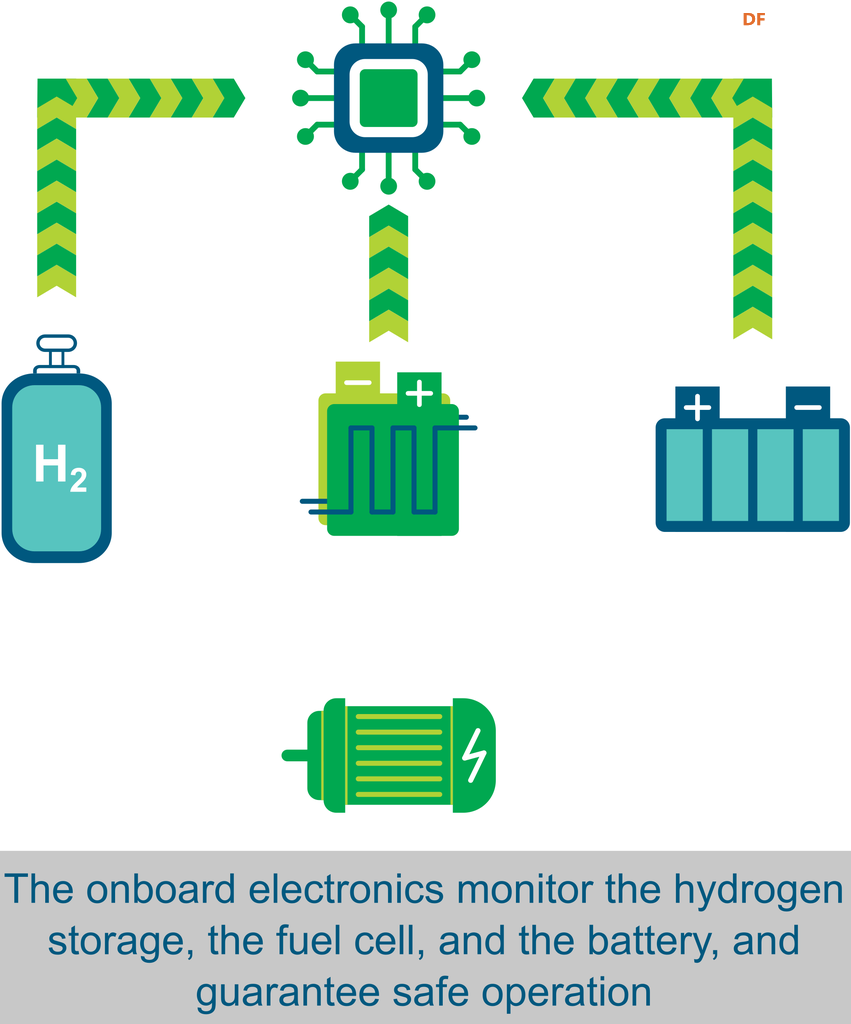
这是系统在准备就绪但未运行时所处的状态。
纯电池供电模式
当燃料电池不工作时,车载电子设备和电机由电池供电。
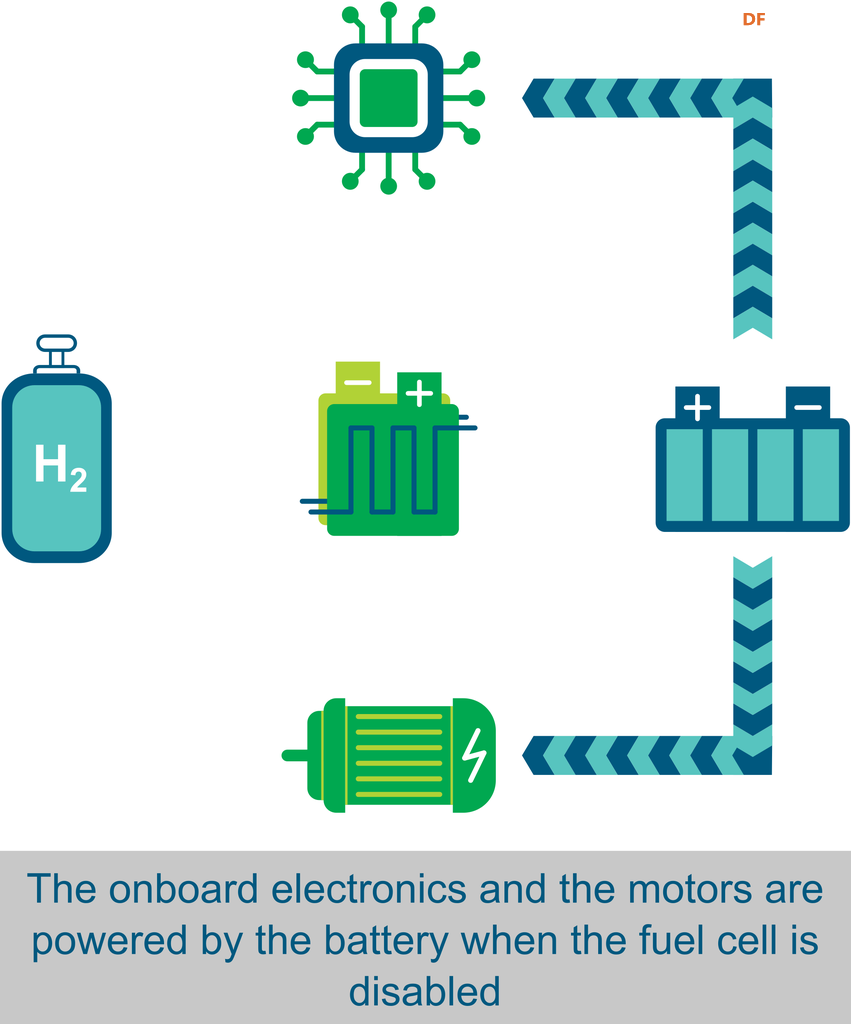
这种模式通常用于系统启动、低功耗运行或燃料电池未激活时的状态。
燃料电池供电与充电模式
燃料电池利用氢气发电,为电池充电,并同时为车载电子设备和电机供电。
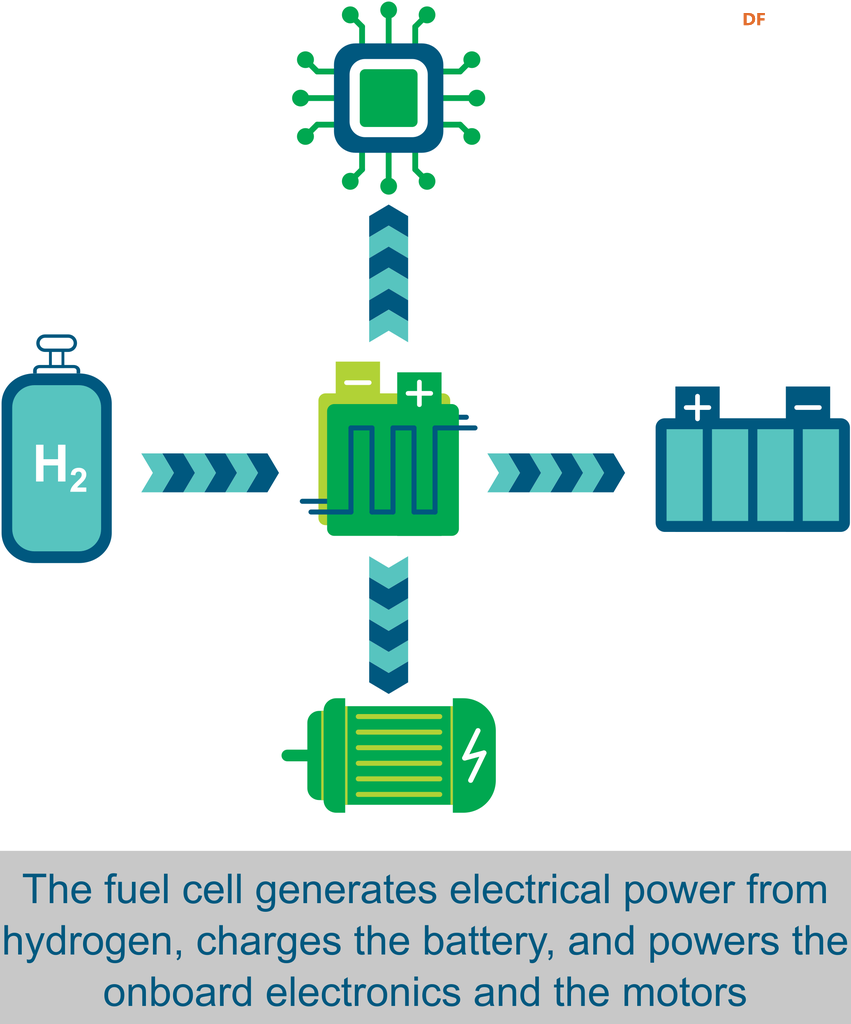
这是系统进入正常工作状态,并且需要为电池补充电能时的模式。
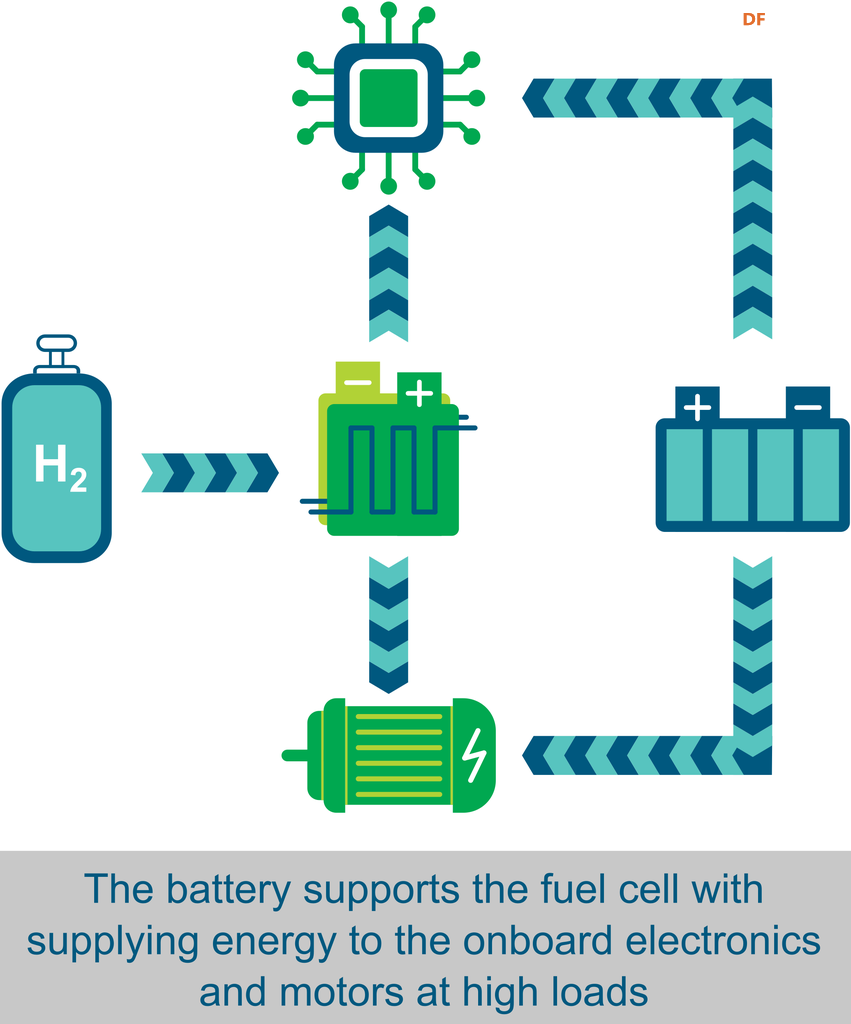
电池辅助燃料电池模式
在高负载下,电池辅助燃料电池为车载电子设备和电机提供能量。
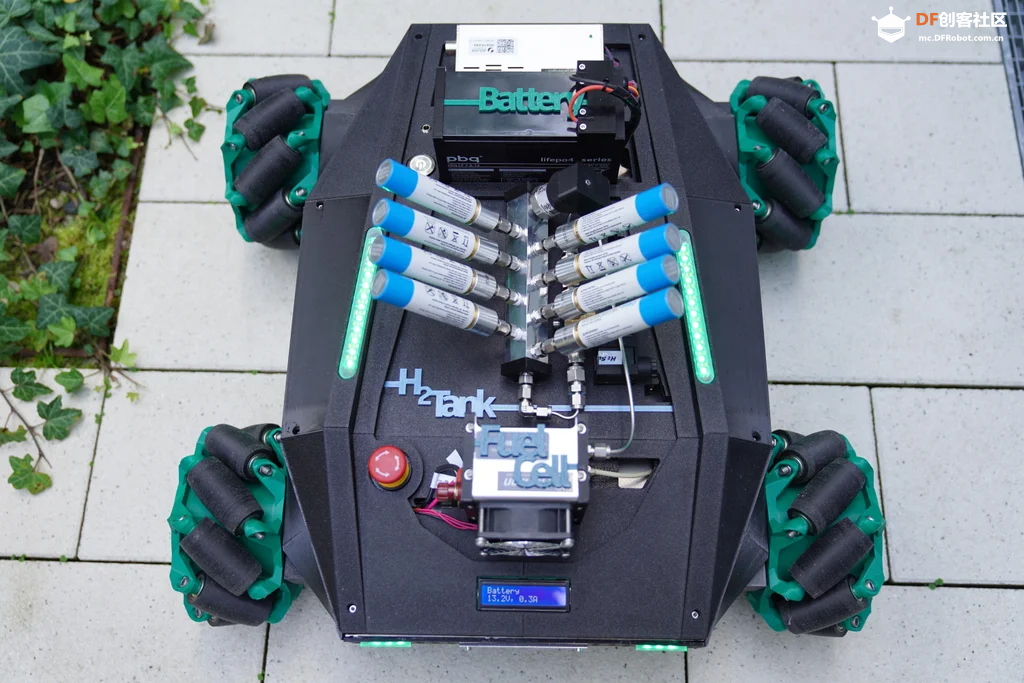
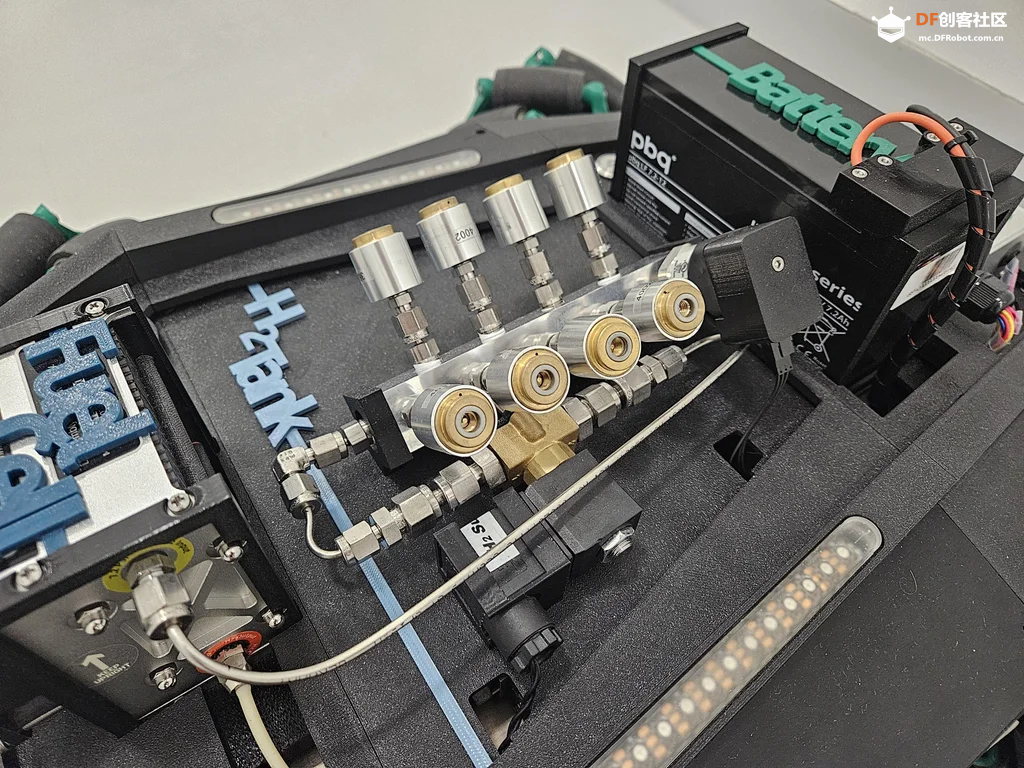
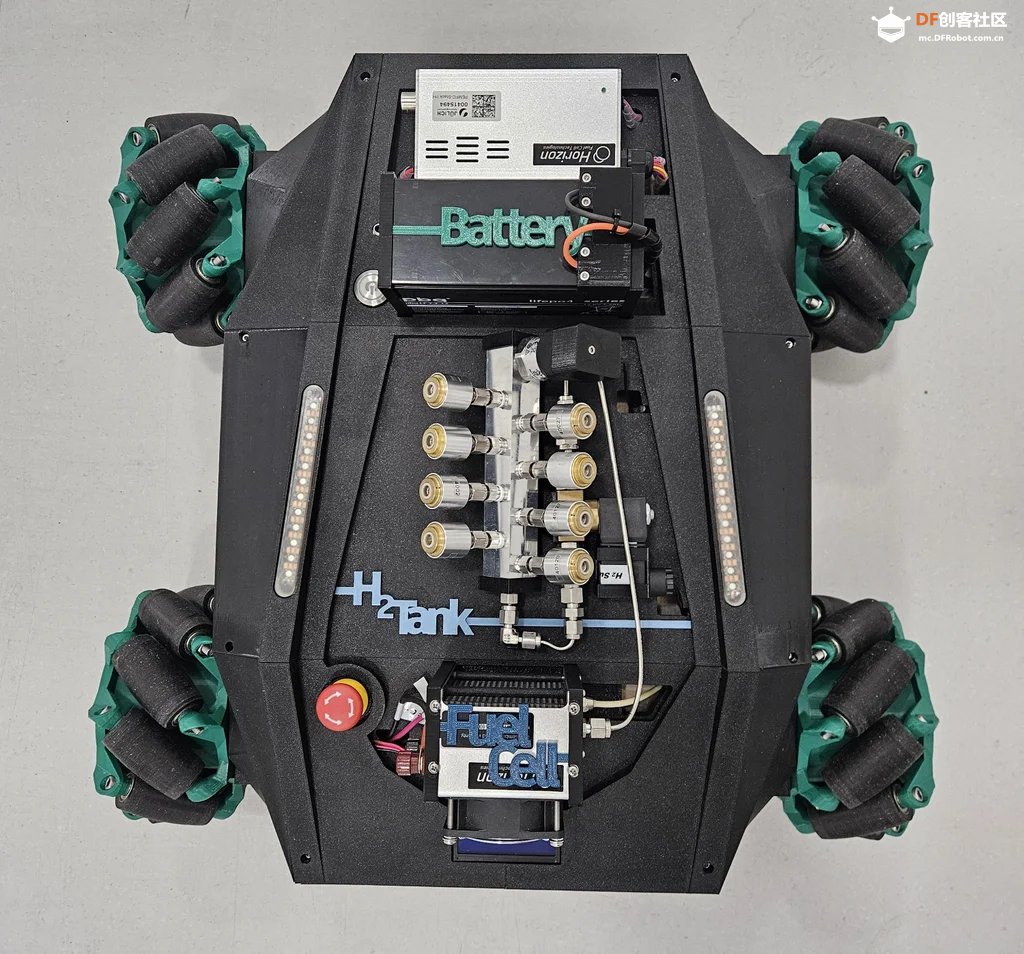
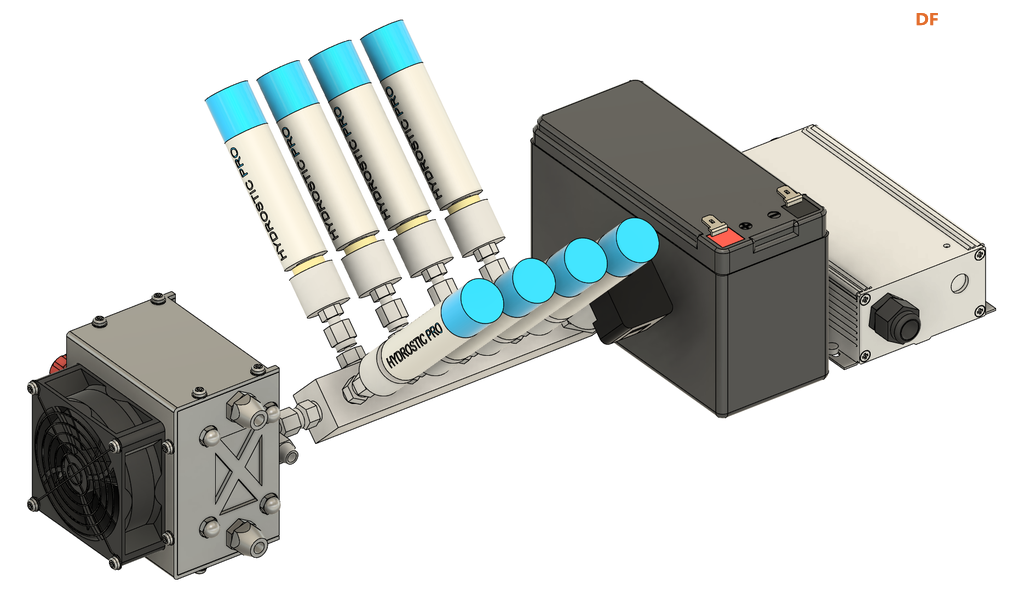
HydroBot的动力系统:
- 燃料电池电堆(“发动机”):选用Horizon H-60 PEM燃料电池,峰值功率60W。 储氢罐(“油箱”):使用8个Hydrostik Pro金属氢化物储氢罐,总供电量可达88Wh。 磷酸铁锂电池(“缓冲器”):一个92Wh的电池组,用于启动系统和应对电机工作时的电流峰值。

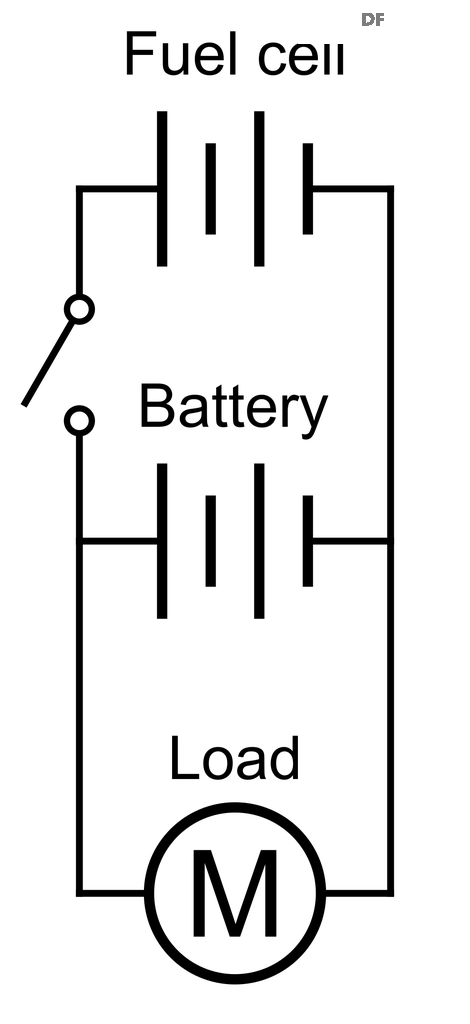
这种混合动力架构让HydroBot既能像纯电动汽车(BEV)一样,由电池驱动,也能在电量不足时,通过燃料电池为电池充电,实现类似增程式电动车的续航模式。
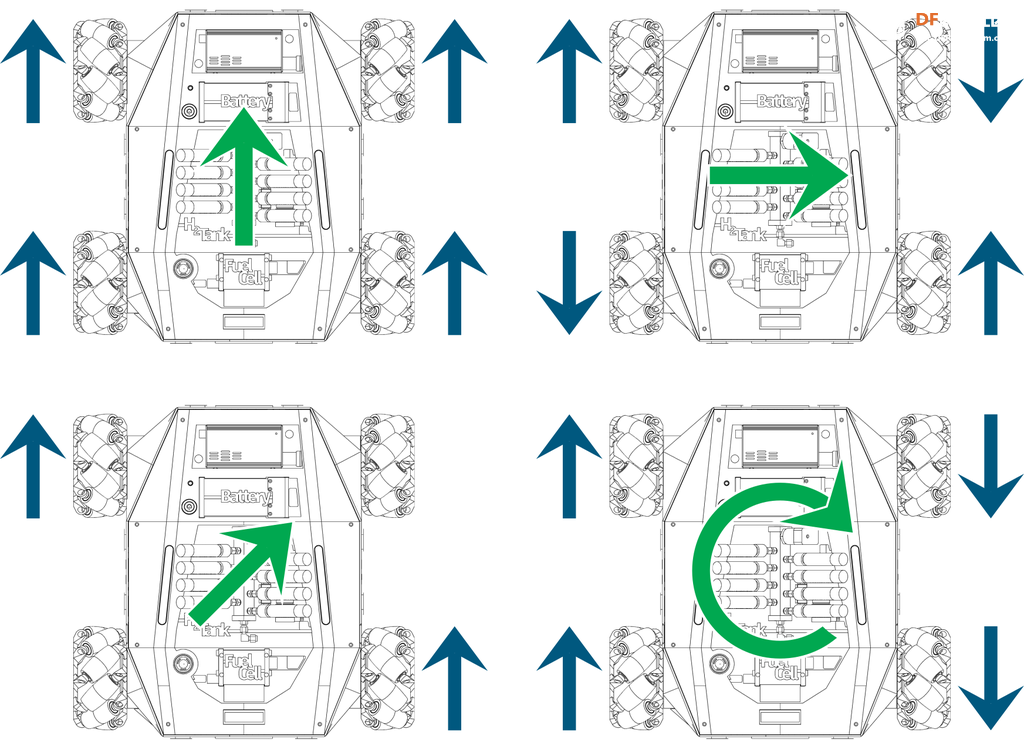
全向移动:麦克纳姆轮驱动
如果说燃料电池是HydroBot的“大脑”,那么其独特的移动系统就是它的“四肢”。HydroBot采用麦克纳姆轮(Mecanum wheel)作为驱动系统,这种特殊的轮子允许机器人实现任意方向的平移和原地旋转,无需传统的转向机构。
作者详细介绍了这些麦克纳姆轮的制造过程:
- 定制打印:轮子的主体由PETG材料3D打印而成,而那些以45度角排列的滚轮则使用了柔性的TPU材料。
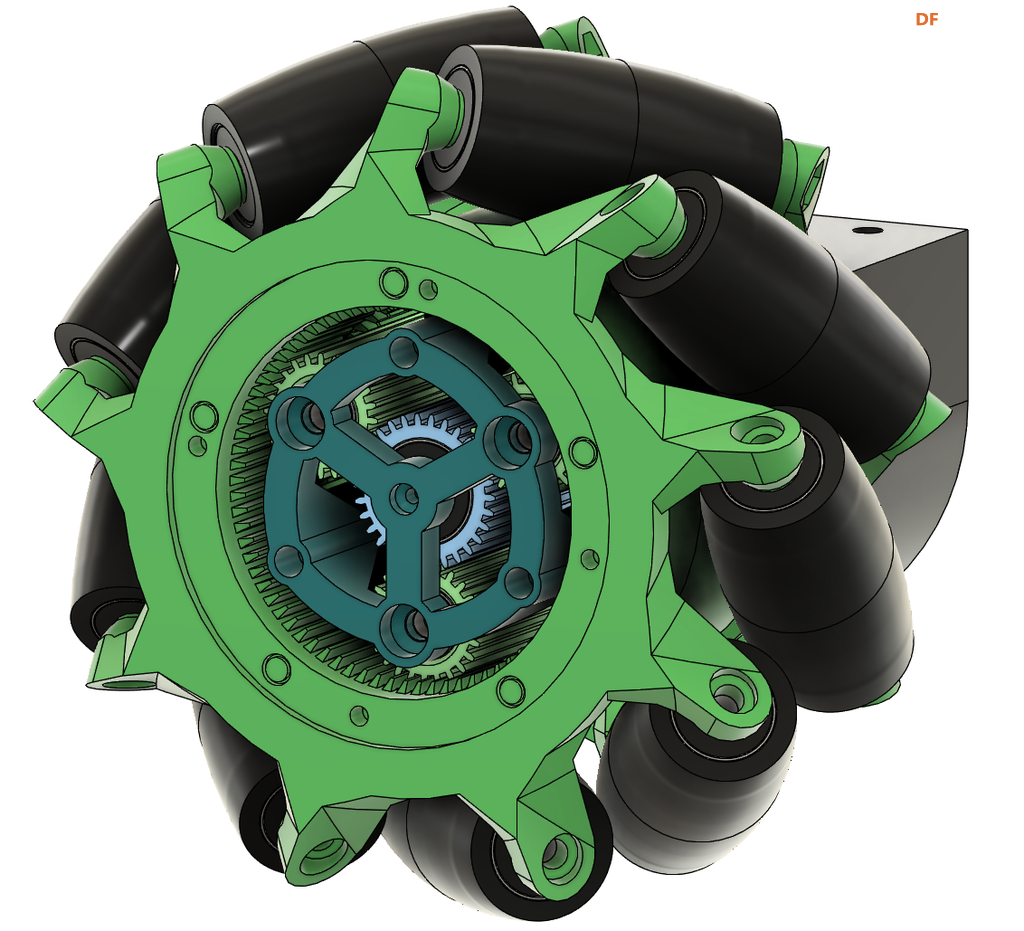
- 行星齿轮箱:为了降低速度并提供更大的扭矩,轮子内部还集成了3D打印的行星齿轮箱。这种设计巧妙地利用行星架固定在底盘上,太阳轮连接电机,而中空齿轮则与轮辋一体,结构十分紧凑。
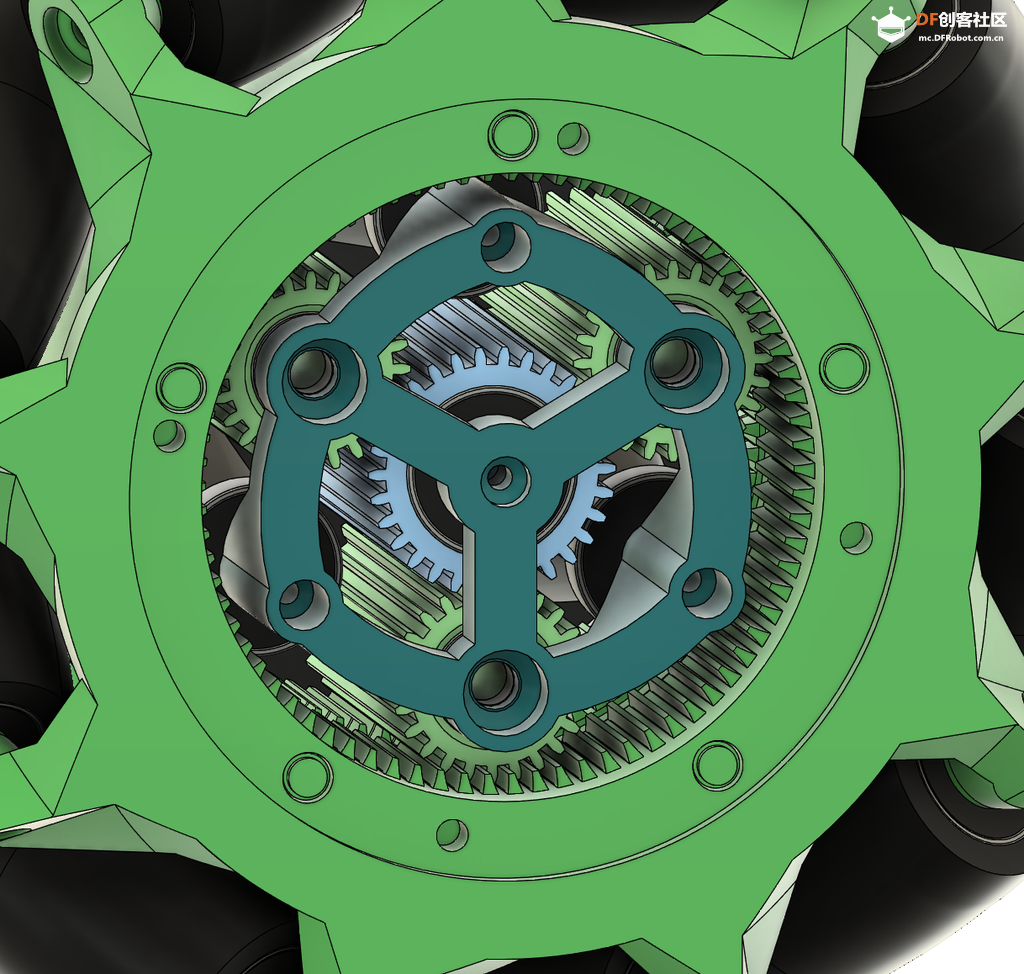
通过这种设计,HydroBot在展会或狭小空间内进行演示时,可以灵活自如地移动,展现出非常好的操控性。
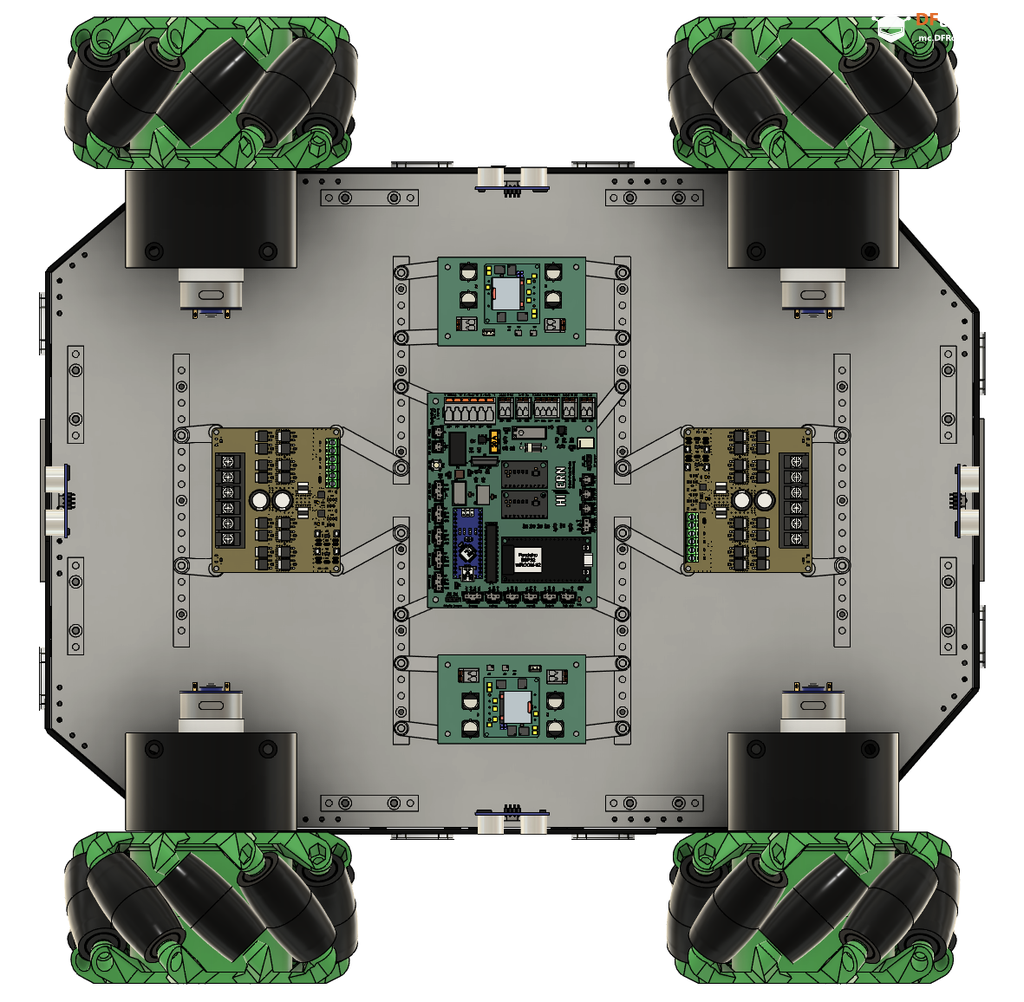
电子和控制系统
作为一款开源项目,HydroBot的电子和控制系统是最值得深入探讨的部分。整个项目并没有直接使用昂贵的商业解决方案,而是采用了ESP32和Arduino Nano等常见的开源硬件,通过巧妙的系统集成来实现复杂的功能。
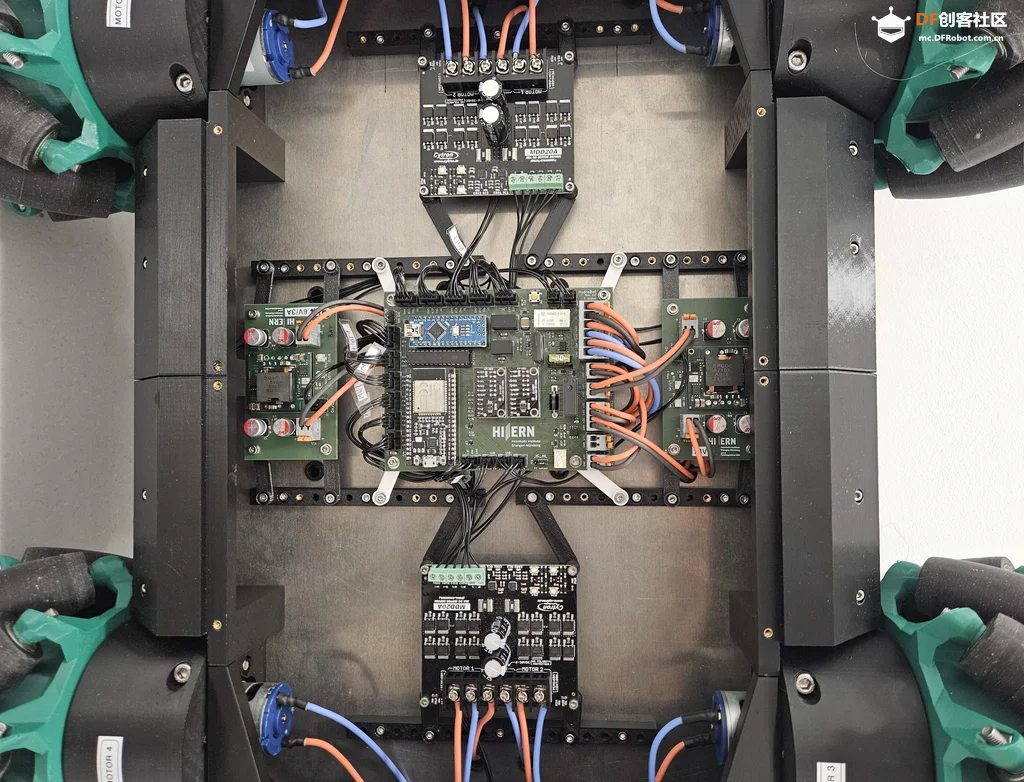
- 双核控制:ESP32作为主控,负责无线通信(ESP-NOW)、电机驱动、灯光控制等;而Arduino Nano则作为辅助,专门处理四个超声波距离传感器的数据,避免了主控因等待传感器回波而造成的代码延迟。 智能电源管理:为了安全地将燃料电池与电池连接,设计者没有简单地使用DC-DC转换器,而是增加了一个肖特基二极管来防止电流反向流动,并通过继电器来控制连接,确保只有在燃料电池开路电压正常时才进行充电。 远程操控与安全:遥控器同样基于ESP32,可以双向通信,实时显示机器人的电量、压力等信息。此外,系统还内置了多重安全机制,例如在与遥控器失去连接时,机器人会自动停止并切断电源,防止意外发生。
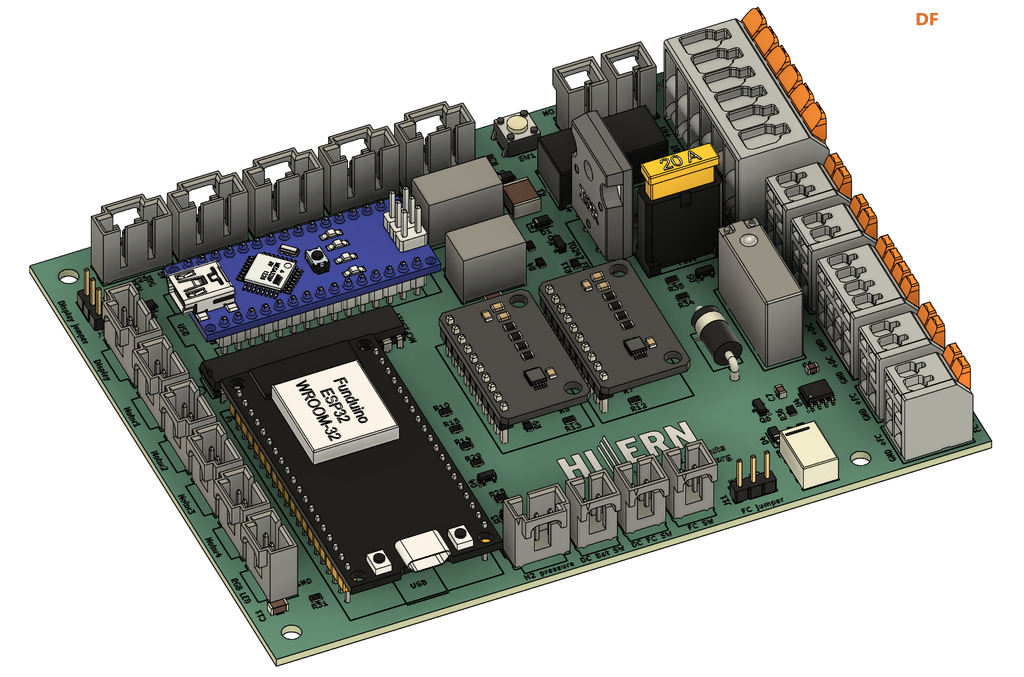
尽管项目开源,但作者也坦诚地分享了开发过程中的“坑”,例如为了解决LCD与主控之间的电压兼容问题而采用的“偏方”,以及在为电池充电时,由于DC-DC转换器无法正常工作而改用二极管和继电器的设计等等。
一个有待完善的未来平台
HydroBot的诞生,是HI ERN研究所研究人员们一次“走出实验室”的尝试。它不仅成功地展示了氢燃料电池的应用前景,也为科研人员提供了宝贵的系统集成经验。
当然,HydroBot也有很多缺点,它目前在成本、加氢便利性、长期可靠性等方面仍有提升空间。
如果你对HydroBot机器人或者清洁能源感兴趣,可以阅读以下HydroBot的开源文档,感受一下这个融合了多领域技术的硬核项目。
项目链接:https://www.instructables.com/HydroBot-a-Fuel-Cell-Powered-Robot/ | 



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






