|
1210| 3
|
[项目] 【花雕动手做】CanMV K230 AI 视觉之摄像头图像水平翻转 |
本帖最后由 驴友花雕 于 2025-11-6 08:36 编辑  什么是 CanMV K230? CanMV K230是一款高性价比的RISC-V边缘AI平台,凭借低功耗、强视觉处理能力和开放的开发生态,成为嵌入式AI开发的理想选择,尤其适合需要快速部署视觉与AI功能的创客、中小企业及教育场景。CanMV 是一套 AI 视觉开发平台,K230 是其核心芯片。该模块结合了图像采集、AI推理、边缘计算等能力,适合嵌入式视觉应用开发。 CanMV:类似 OpenMV 的图像处理框架,支持 Python 编程,简化视觉识别开发流程。 K230 芯片:嘉楠科技推出的 AIoT SoC,采用 RISC-V 架构,内置第三代 KPU(AI加速单元),算力高达 6 TOPS,性能是 K210 的 13.7 倍。   |
|
知识点 摄像头图像翻转是调整摄像头对采集的图像进行方向调整(如上下颠倒、左右镜像)的处理,常用于修正因摄像头安装角度(如倒置、侧装)或硬件特性导致的画面方向异常,确保显示的图像符合人眼视觉习惯。 1、常见的翻转类型(按方向划分) 水平翻转(左右镜像)图像沿垂直中轴线对称反转,类似照镜子的效果(左变右、右变左)。▶ 适用场景:摄像头镜头朝向错误(如自拍时画面左右颠倒)、视频通话时对方看到的画面与自己动作镜像(需矫正为正向)。 垂直翻转(上下颠倒)图像沿水平中轴线反转,画面上下颠倒(顶部变底部、底部变顶部)。▶ 适用场景:摄像头倒装(如监控摄像头为隐藏安装而倒置固定在天花板)、硬件驱动默认输出方向错误(如部分 USB 摄像头初始画面颠倒)。 旋转(90°/180°/270°)严格来说属于 “旋转” 而非单纯 “翻转”,但常被归为同类调整。通过顺时针或逆时针旋转图像,解决摄像头侧装(如竖屏设备中横装的摄像头)导致的画面倾斜问题。▶ 适用场景:车载摄像头侧装、竖屏显示器搭配横置摄像头(如手机竖拍时画面需要旋转 90°)。 2、实现方式(硬件 / 软件层面) 图像翻转的处理可在采集端或显示端完成,具体方式取决于设备功能: 1. 硬件层面(摄像头 / 芯片自带功能) 部分摄像头内置翻转电路或通过 ISP(图像信号处理器)直接输出翻转后的图像,无需额外软件处理,延迟更低(如监控摄像头的 “倒装模式”,在硬件中预设垂直翻转)。 原理:在图像传感器输出原始数据后,通过芯片内部逻辑调整像素排列顺序(如垂直翻转时,将第 1 行像素与最后 1 行对调)。 2. 软件层面(系统 / 应用程序处理) 若硬件不支持,可通过软件算法对图像数据进行翻转,常见于手机、电脑等设备: 系统级设置:在摄像头驱动或设备设置中勾选 “水平翻转”“垂直翻转”(如 Windows 的 “相机” 应用设置、Android 的摄像头参数配置)。 应用级处理:视频软件(如 OBS 直播软件、Zoom 会议软件)通过图像算法实时翻转画面(如调用 OpenCV 的flip函数,参数控制翻转方向)。 原理:通过代码遍历图像像素矩阵,重新排列像素位置(例如水平翻转时,交换每行的左右像素;垂直翻转时,交换每列的上下像素)。 3、典型应用场景 监控摄像头:倒装在天花板时,通过垂直翻转让画面恢复正向(避免观看者仰头 “歪脖子”)。 手机 / 平板自拍:前置摄像头默认输出镜像画面(符合人眼习惯),但部分场景(如扫码)需关闭镜像(水平翻转)以确保二维码正常识别。 直播 / 视频会议:主播通过水平翻转修正画面左右颠倒,让观众看到与实际动作一致的方向。 工业检测:摄像头斜向安装时,通过旋转调整画面至正向,便于机器视觉算法分析(如检测产品缺陷时需画面方向统一)。  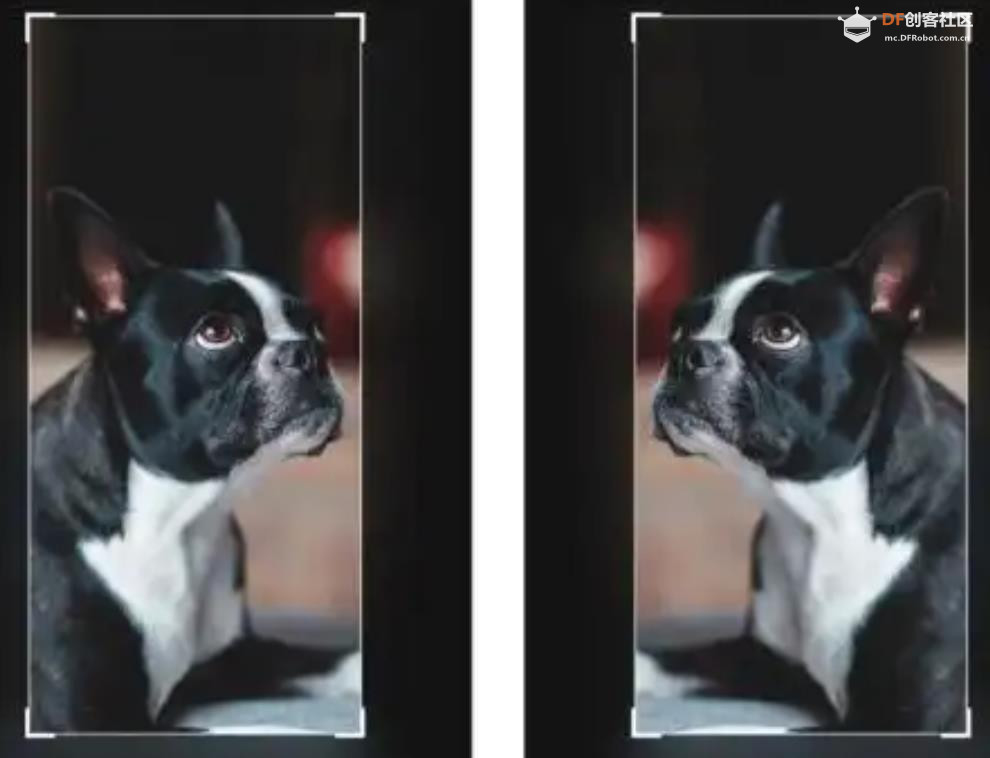  |
|
【花雕动手做】CanMV K230 AI视觉识别模块之摄像头图像水平翻转(镜像) 描述 配置图像传感器是否进行水平镜像。 语法 sensor.set_hmirror(enable) 参数 参数名称 描述 输入/输出 enable True 开启水平镜像功能 False 关闭水平镜像功能 输入 返回值 返回值 描述 无 举例 sensor.set_hmirror(True) 项目测试实验代码 代码核心功能解析 1. 水平镜像实现 python 功能:启用摄像头水平镜像 效果:图像左右翻转,如同照镜子 应用场景: 前置摄像头应用 需要镜像显示的场合 文字识别前的预处理 2. 图像处理流水线 text 摄像头采集 → 水平镜像处理 → RGB565格式转换 → 显示输出 3. 资源管理特点 异常安全:使用try-except-finally确保资源正确释放 渐进式初始化:按顺序初始化各组件 完整清理:确保所有硬件资源都被正确释放 4. 关键参数说明 分辨率:640×480 - 平衡性能与清晰度 像素格式:RGB565 - 节省内存的16位彩色格式 显示模式:ST7701驱动 + IDE输出 - 便于调试 技术要点 镜像设置的时机 在sensor.reset()之后立即设置set_hmirror(True),确保在数据流开始前就配置好镜像参数。 资源释放顺序 严格按照以下顺序清理: 停止传感器 关闭显示 释放媒体资源 这个程序展示了如何在CanMV K230模块上实现基本的摄像头镜像功能,代码结构清晰,异常处理完善,适合作为计算机视觉项目的基础模板。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶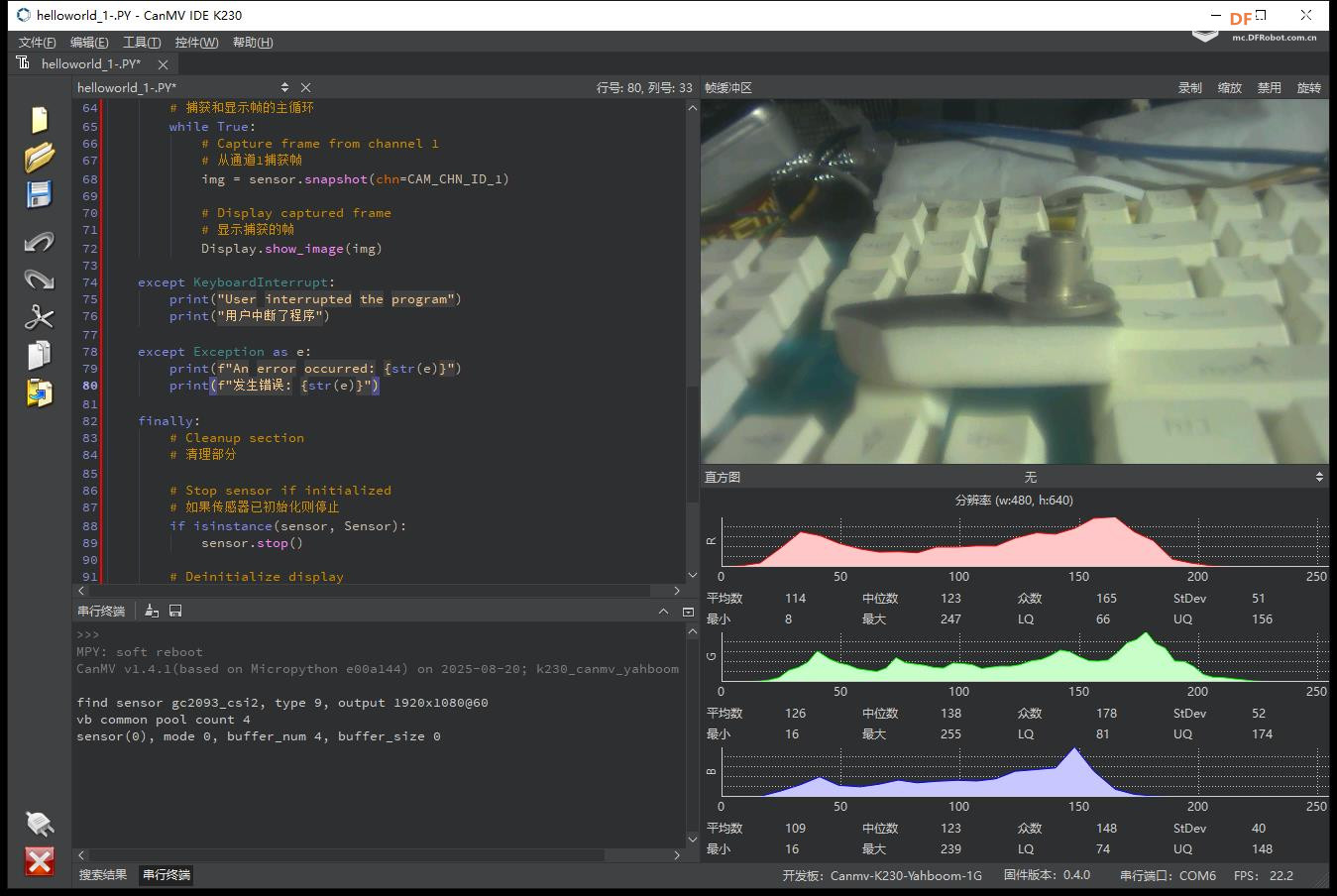

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






