本帖最后由 _深蓝_ 于 2025-12-2 12:19 编辑
我们先看看使用二哈识图2和Arduino Uno制作简单手势控制云台的视频,然后我们一起做。
【项目介绍】
我们可以使用按钮控制云台舵机的运转,二维自由度旋转,但是有电线的束缚。我们可以使用无线连接遥控控制云台。但是我们还可以使用二哈识图2的手势识别控制云台的运转。从简到难,我们入手二哈试图2,尝试它的智能魅力。
【工作原理】
我们使用二哈识图识别手势x位置和y位置,根据位置的变化,驱动舵机的运动。本例中我们手向右移动,底部舵机旋转。手向上移动,顶部舵机做抬头或低头动作。
【器材清单】
(一)【硬件】
1.二哈识图2

Gravity:二哈识图 2 是一款简单易用、玩法丰富的 AI 视觉传感器。其搭载 6TOPS 算力专用 AI 芯片,预置人脸识别、目标检测、物体分类、姿态识别、实例分割等 20 余种开箱即用的 AI 模型;同时支持部署用户自定义训练模型,可灵活教会设备识别任意目标物体。该传感器完美兼容 Arduino、micro:bit、ESP32、UNIHIKER(M10/K10)、掌控板、Raspberry Pi 等主流控制器,为智能机器人、工业自动化、教育科研等多元场景,提供高效可靠的全能型视觉解决方案。
2.Arduino Uno主控板
Arduino Uno主控板带扩展板
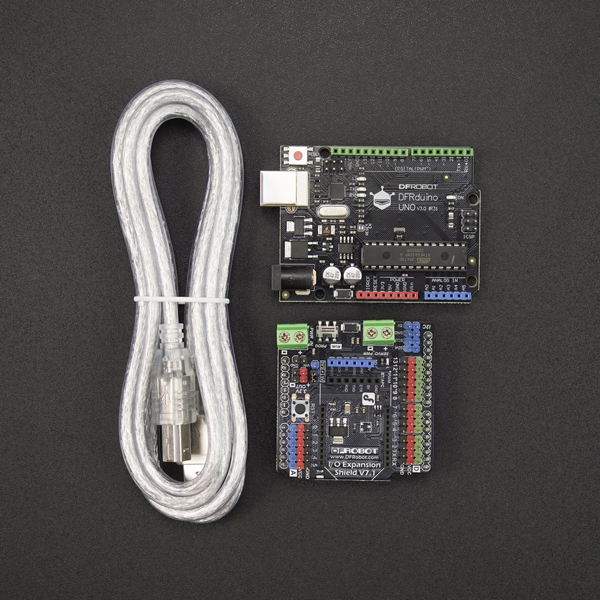
DFRduino UNO R3 是一款基于开源理念打造的简易 I/O 电子原型平台,配备类 Java、C 语言风格的开发环境,让您能快速通过 Arduino 语言,结合 Flash、Processing 等软件高效实现互动作品开发。
该开发板可灵活对接各类现成电子元件,包括开关(Switch)、传感器(Sensors)、其他控制器,以及 LED 灯、步进电机等输出设备;同时也能独立运行,作为核心控制单元与 Flash、Processing、Max/MSP、VVVV 等互动软件实现数据通信。
3.DFRobot DF9GMS 180° 微型舵机 或360° 微型舵机
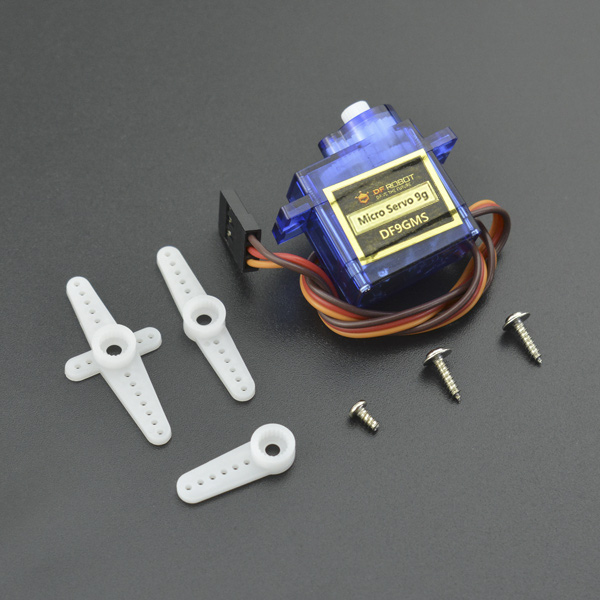
DFRobot 出品的 DF9GMS 180° 微型舵机,采用高强度透明 ABS 外壳与内部高精度尼龙齿轮组,搭配精准控制电路及高档轻量化空心杯电机,在仅 9 克的轻巧机身下,实现了 1.6kg・cm 的惊人输出力矩,兼具便携性与强劲性能。
4.迷你2自由度云台(无舵机)

DFRobot 两轴尼龙云台(20g 轻量化设计),专为 9g-12g 舵机量身适配。产品外形精致、做工精密,组件贴合紧密无晃动,配备舵机线绕线夹,便于理线收纳。其体积小巧、重量轻盈,完美适配各类 DIY 小制作与创意搭建场景,支持灵活自由架构。
需要注意的是:
1.迷你2自由度云台不含舵机,需单独选购;
- 安装需对舵盘进行剪裁:底部适配十字舵盘,侧边适配单个舵盘;
3.兼容舵机型号:SER0006、TowerPro SG90 舵机、DMS-MG90 金属 9 克舵机。
二、软件
Mind+ V2

Mind+ V2 是一款专为创意造物而生的全能型工具软件,深度整合程序设计、AI 模型训练与可视化界面设计三大核心功能,打造 “一站式创作工作台”。软件创新支持图形化拖拽编程与 Python/C++ 等代码编程双模式,入门者可通过模块化积木快速上手,进阶用户能切换代码模式实现复杂功能开发,无缝衔接不同阶段的学习与创作需求。
Mind+ V2 全面适配 Arduino、micro:bit、ESP32、树莓派、UNIHIKER 等海量主流主控板及开源硬件,无需额外配置驱动即可快速连接,覆盖智能机器人、物联网装置、AI 视觉项目等多元应用场景。无论是青少年启蒙编程思维、完成 STEM 课程作品,还是创客实现创意原型开发、落地复杂项目,都能通过其一体化工具链高效实现从创意构思到成品落地的全流程,真正做到 “一站式满足从入门到精通的创造需求”。
【实现步骤】
(一)云台组装
使用官网教程,组装云台,需要注意的是兼容舵机型号:SER0006、TowerPro SG90 舵机、DMS-MG90 金属 9 克舵机。并且安装时需要对舵盘进行剪裁。分部步骤如下:
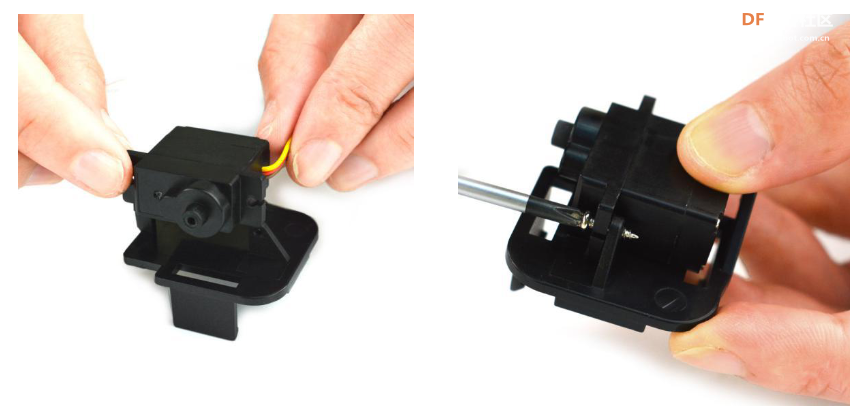
- 准备好云台和两个小舵机,螺丝若干。

- 需要削掉一些底座用螺丝装上舵机臂。

- 固定好第一个舵机。
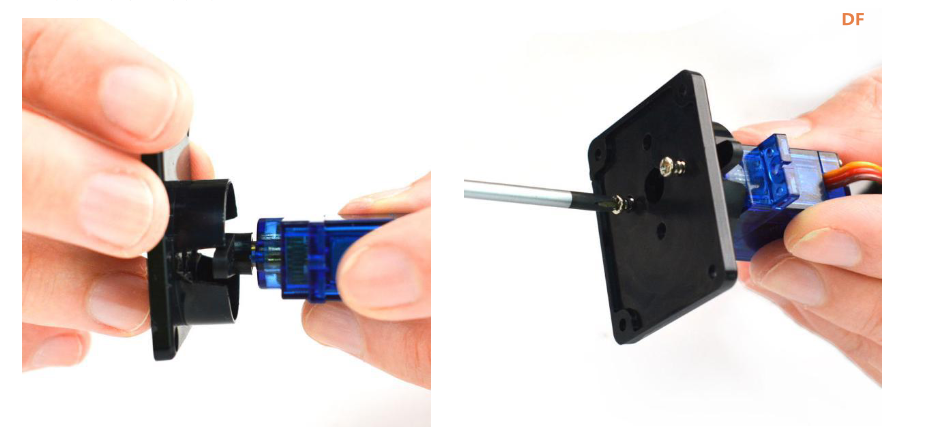
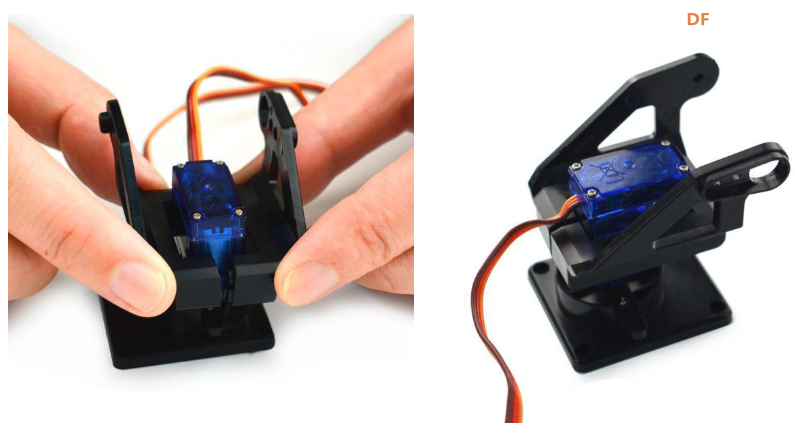
- 将云台两个侧翼相对安装在舵机上。
- 将第二个舵机安装在摄像头支架上。
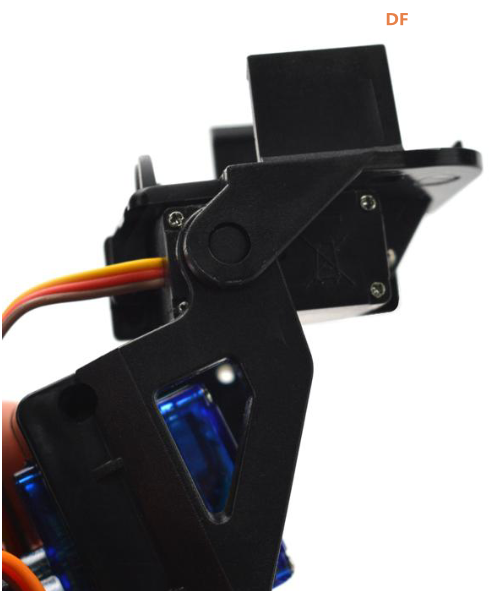
- 两个部分相连接,一边凹凸处相扣。
- 另一边安装上舵机臂与第二个舵机连接。(需削短一部分舵机臂)
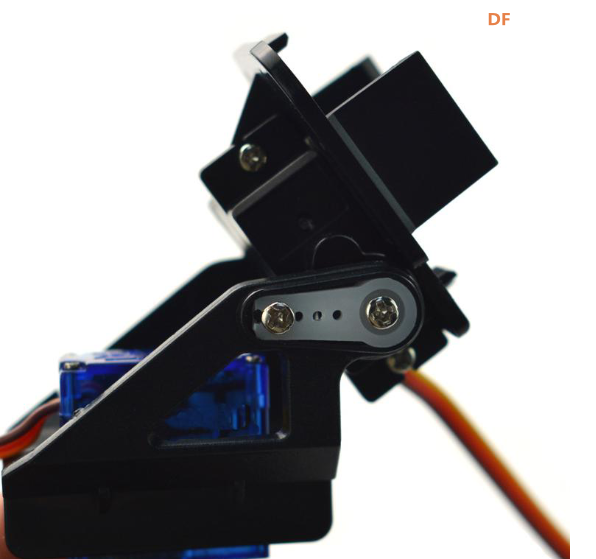
- 安装完成。
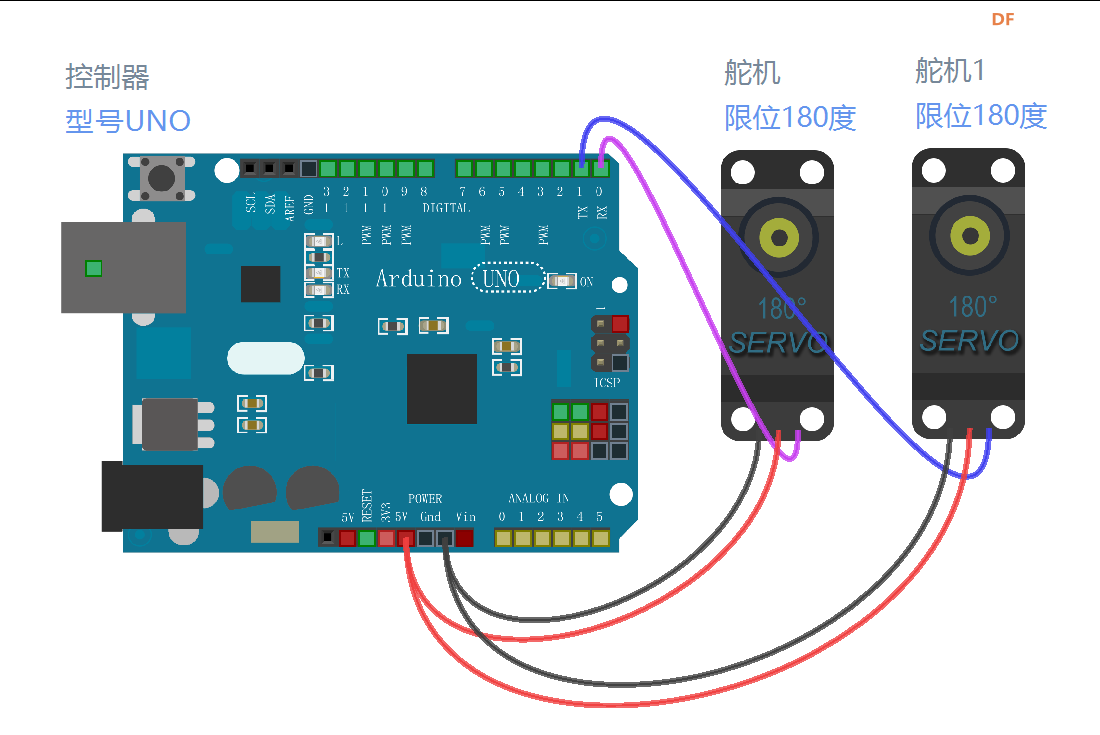
(二)电路连线
二哈2与Arduino Uno接线:
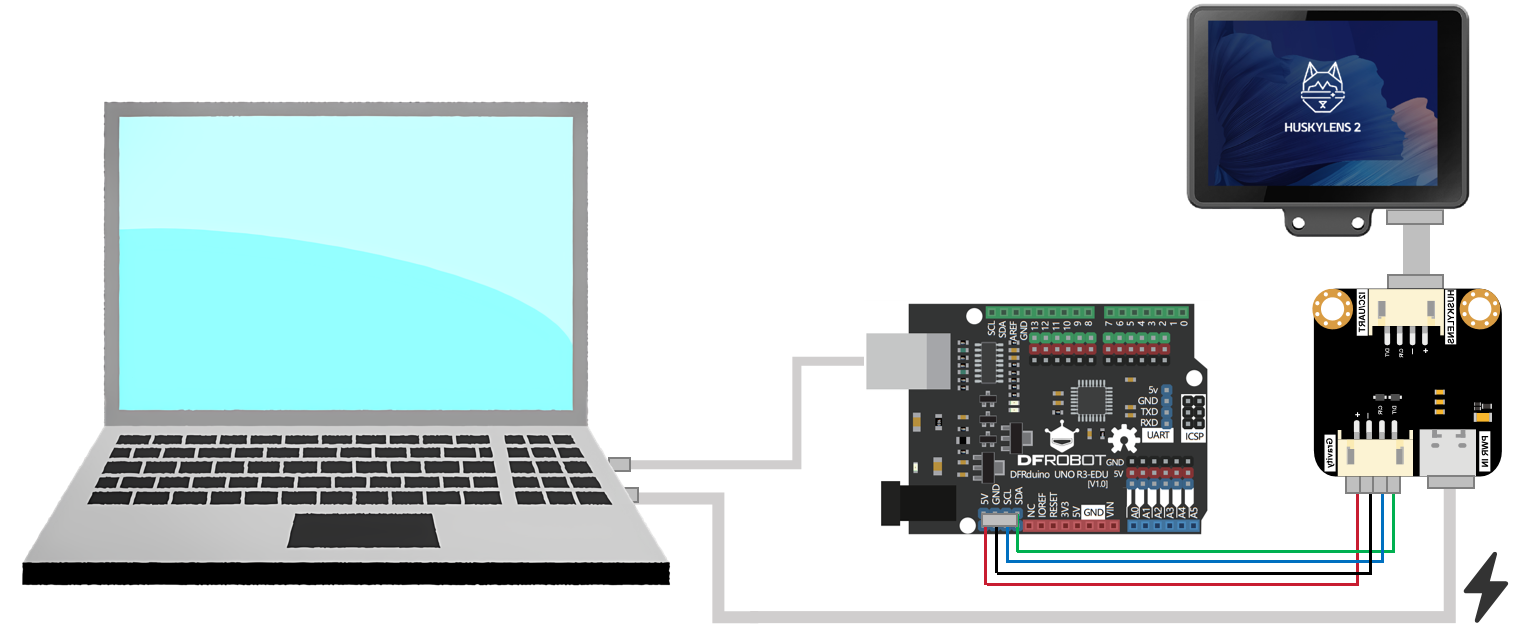
Arduino Uno与舵机接线:
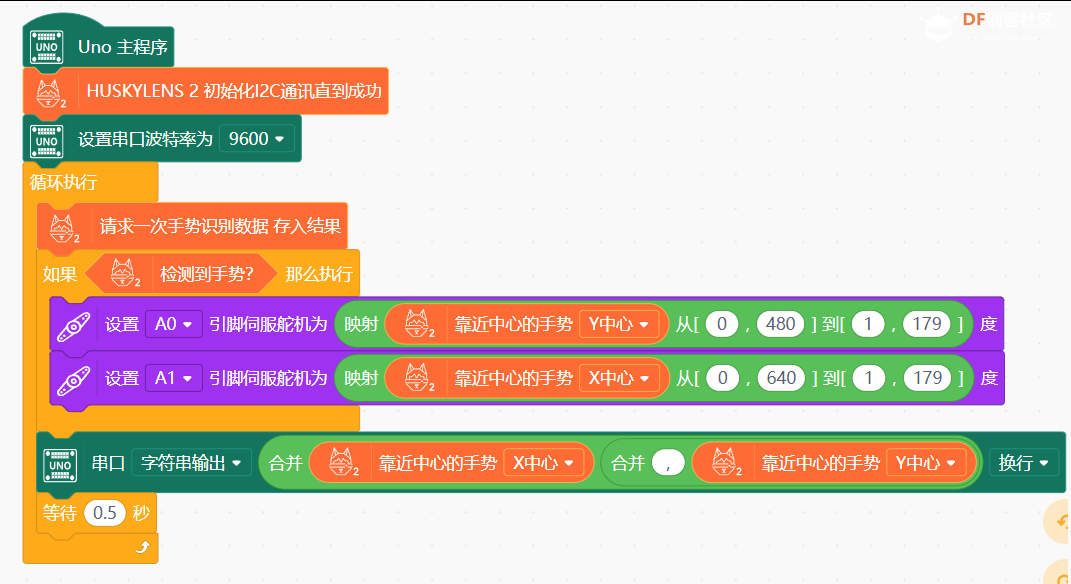
(三)编写程序
1.设置舵机旋转角度等于手势x和y的映射值。
2.舵机角度的映射是从手势在屏幕上x,y位置(640,480)映射到舵机的角度(0-180度)

3.串口输出手势的坐标值,用来验证。
4.延时0.5秒,避免死机。

完整程序如下:
四、成果展示
手势自左向右

手势自右向左
手势自下向上
手势自上向下

我们发现二哈的识别灵敏度非常高的,舵机能完成相关动作,但是有点颠簸,这跟手的位置并非沿着x或者y方向有关,有一点抖动。
五、知识储备
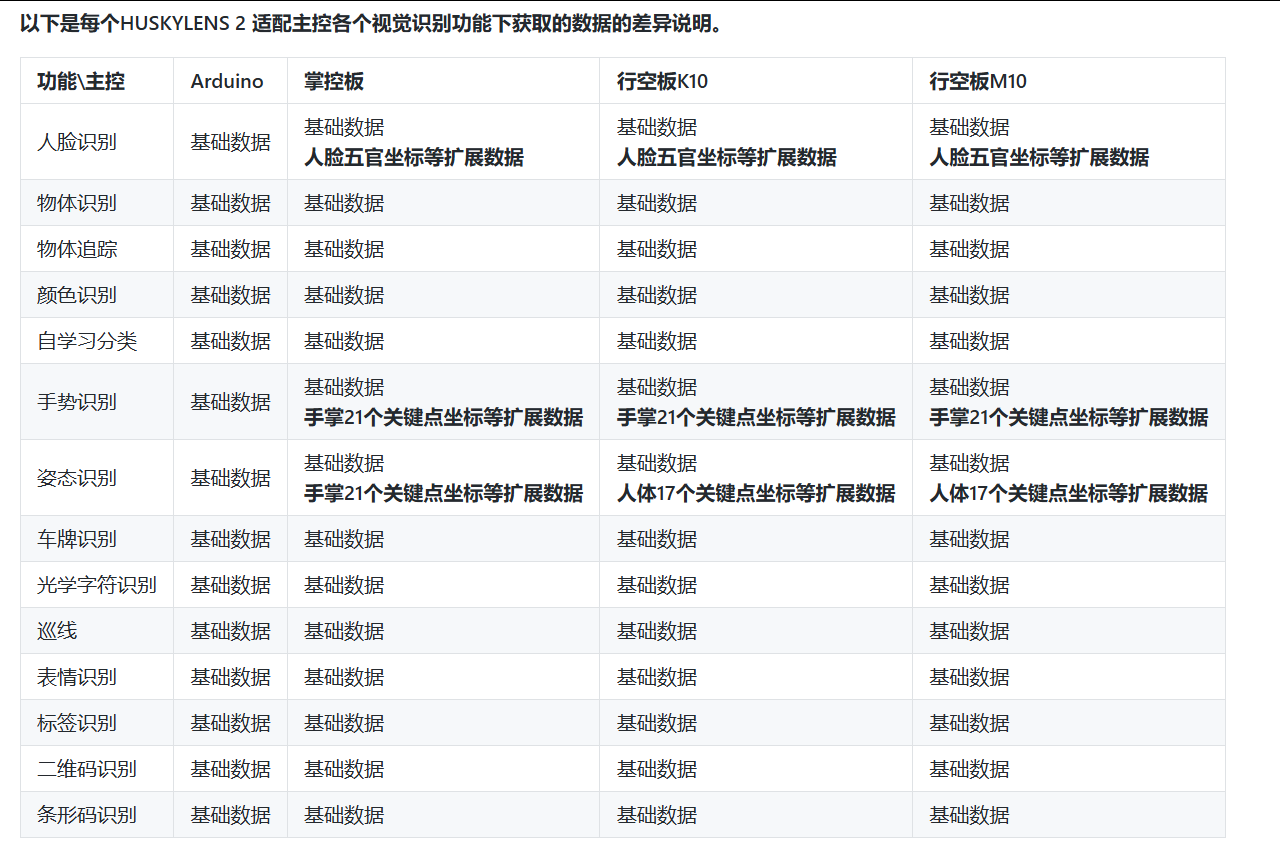
1.使用ArduinoUno,由于硬件限制,能够获取的信息非常有限,以下是各开发板的区别。
2.固定二哈识图2和云台
二哈识图2搭载固定件,可以使用M3螺丝固定在其他洞洞板上,云台使用的螺丝较小,无法固定到洞洞板,需要自主打印3d件或者切割椴木板用于固定云台。
3.舵机工作电压4.8V~6V,而行空板和掌控板输出电压均3.3V,直接接在端口会出现异常,选择Arduino Uno可以直接连接舵机,运行时动力强劲。
| 


 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






