|
1727| 0
|
[M10项目] 基于行空板M10打造一个离线便携导航仪! |

PathFinder 是一款可穿戴便携设备,可以存储离线地图,并通过方向键来查看和导航。  PathFinder,一款由 行空板M10 驱动的 DIY 数字离线地图设备,旨在帮助你找到方向。 我经常在家乡附近的山区骑行,那里经常有些地方完全没有信号。完全依赖谷歌地图是绝对不行的;有时由于数据问题,地图无法完全加载, 如果我们有实体地图和一些导航技能,这些问题都能解决。我没有实体地图,但我制作了一个数字地图,加载在 UNIHIKER M10 板上。我们可以通过方向键导航地图。有了这个,如果被困住了,人们就可以自救。 为了测试这个方法,我去了家乡附近山区的一个偏远地区,用这张地图导航一条我从未去过的路。我跟着地图走,顺利找到了路。 本文涵盖了该项目的完整构建过程,从 PCB 的构建到代码和器件组装,让我们开始吧。 准备工具  地图方面,我从《辐射:新维加斯 Pip-Boy 3000》的界面中获得了灵感,它带有琥珀色调。普通地图很无聊,作为《辐射》粉丝,我有责任制作一张受 Pip-Boy 启发的地图。 使用了两个库。第一个是 UNIHIKER 驱动,它控制内置的 240×320 显示屏。还有 PinPong 库,用于读写 GPIO 引脚。 显示帧 我们先创建一个图像小部件,然后每帧更新其文件。 用Pillo渲染 所有图形均通过 Pillow 在内存中合成 ——没有帧缓冲区,也没有 pygame。每一帧通过:
设置地图颜色 地图加载时是正常的 RGB。为了获得 Pip-Boy 的荧光粉外观,红色通道作为三个通道的亮度源: 物理按钮 按钮接线到带有内部上拉电阻的 GPIO 引脚。按下时,针脚会拉低电位,读数为“0”表示“被压”。 竖屏上的风景 实体显示是240×320(竖屏)。我会在320×240画布(横幅)中绘制,并在保存前旋转每一帧: 渲染环 标准固定时间步循环——在帧预算剩余时间内休眠。 Libraries 电源输入 接着,在配置好地图设置后,我们解决了行空板的电源输入问题。行空板M10 使用 USB Type-C 端口作为电源输入,提供稳定的 5V 电压,使设备能够正常运行。这块板的问题是没有内置电池接口。 在 Type-C 端口附近,我们发现了两个终端。第一个端子连接到 USB Type-C 端口的 VCC,另一个端子连接到 GND。 通过给这两个端子提供 5V,我们可以为这块板供电,但为此,我们需要一个稳定的电源。 3D设计  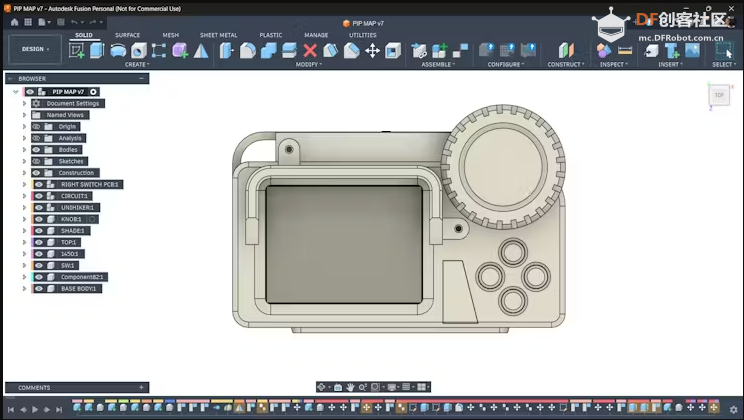 在这个项目中,我的想法是做一个屏幕旁边有四个按钮的设备,灵感来源于赛博朋克类型,强调显示屏,造型方正对称。 为了提升设计效果,我添加了屏幕反光遮阳板部分,这也具有实用功能。当设备在户外使用时,它为行空板的显示屏提供遮阳,使视野更为清晰。 为了美观,特意加了一个较大的按钮,通过添加不同部件,用三种彩色耗材——红、白、黑——来 3D 打印这些部件,创造出极佳的色彩组合。 模型内部有完善的电路布局,包括按钮板。每个电路都有自己的安装螺丝凸台,我们用 M2 螺丝固定电路板并固定。 我们还在设备一侧增加了开口,方便访问 UNIHIKER M10 的 USB 端口,以便重新编程设备。还增加了开口,用于连接电源模块的 USB 端口和开关按钮。 我们在一端加了一个类似挂钩的部分,可以连接带子来存放证件。  模型最终确定后,我们用 Hyper PLA 在相同设置下 3D 打印了所有零件,包括 0.2 毫米层高、25%填充和树木支撑,Z 轴距离为 0.3 毫米。 前身印有白色 Hyper PLA 字样。背部机身、遮阳部分和美观部分均采用黑色 Hyper PLA 印刷。红色 Hyper PLA 用于打印四个开关和旋钮部分。 PCB 设计——电源板 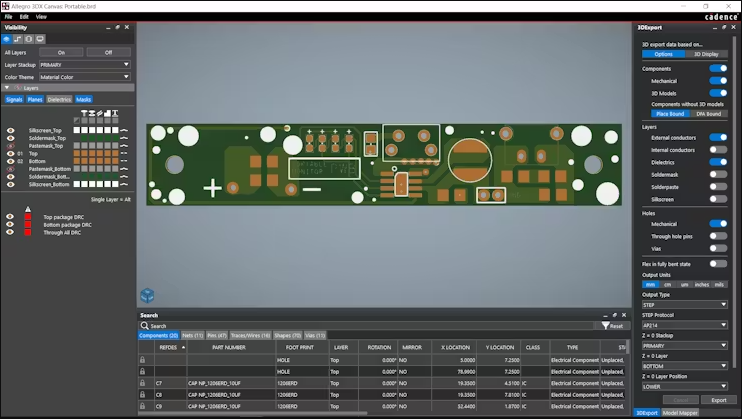 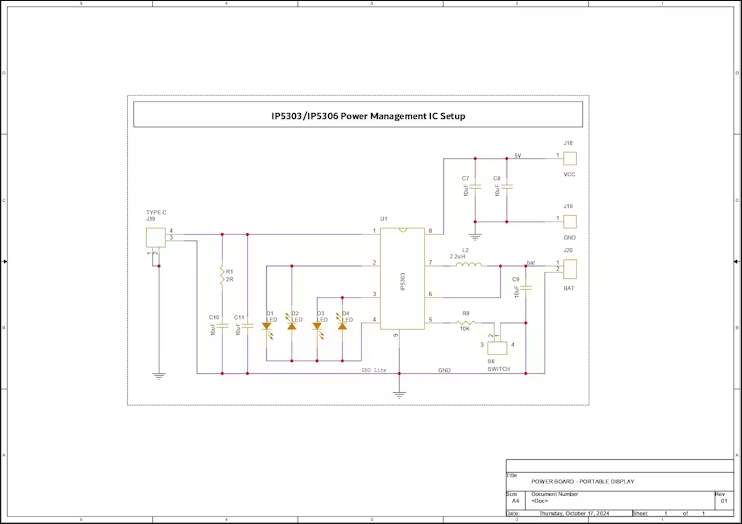 在该电路中,IP5306 电源管理集成电路从 3.7V 锂离子电池中获得稳定的 5V/2A 电流。其高切和低切特性防止了电池的过充和过放电。 我们使用的充电口是一个 C 型通孔口,连接到 IC 充电口。除了充电口和 GND,我们还加入了一个 10uF 滤波电容和一个 10uF 电容组合,并配有 2 欧姆电阻。 此外,IC 的 LED 接口还增加了四个 LED 灯,作为电池满电指示灯。 新增了一个按钮,用于设备开关。 此外,我们在 IC 和 GND 输出端增加了两个额外的滤波电容。 动力来源本项目的电源是锂离子电池,具体来说是 14500 的 3.7 伏 600mAh 锂离子电池,预装了 PCM 电路。该 PCM 电路保护电池免受过载和过放电,甚至提供短路保护。 
按钮板组装 按钮板的组装相当简单。 我们把四个按钮都放到原位,翻过主板,然后用烙铁焊接所有按钮的引脚。 连接设备    按以下顺序连接:
外壳部件组装
你还可以额外加一条肩带,方便外出携带设备。  成果与展望 进过以上步骤,基于行空板M10的DIY 的数字地图设备就完成了,可以帮助旅行者找到自己的道路。它基本上是一个屏幕里的地图,加载时没有 Wi-Fi 或任何网络连接。用方向键,我们可以轻松导航地图。 为了测试,我骑着摩托车去了一个以前没去过的地方,用 PathFinder 导航,效果相当不错。 另外,还可以通过添加温度传感器、视频录制,甚至一些 AI 功能,比如追踪前方车辆来扩展它的功能。如果安装在车上,甚至可以配备蓝牙扬声器,拥有可能性无限。 作者:Arnov Sharma 首发平台:探路者 - Hackster.io --- PathFinder - Hackster.io |
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






