|
12122| 2
|
[教程] Romeo for Edison Controller 舵机实验 |
|
本帖最后由 dwblinux 于 2014-12-10 10:55 编辑 Romeo for Edison Controller 舵机实验  【元件清单和硬件连接图】 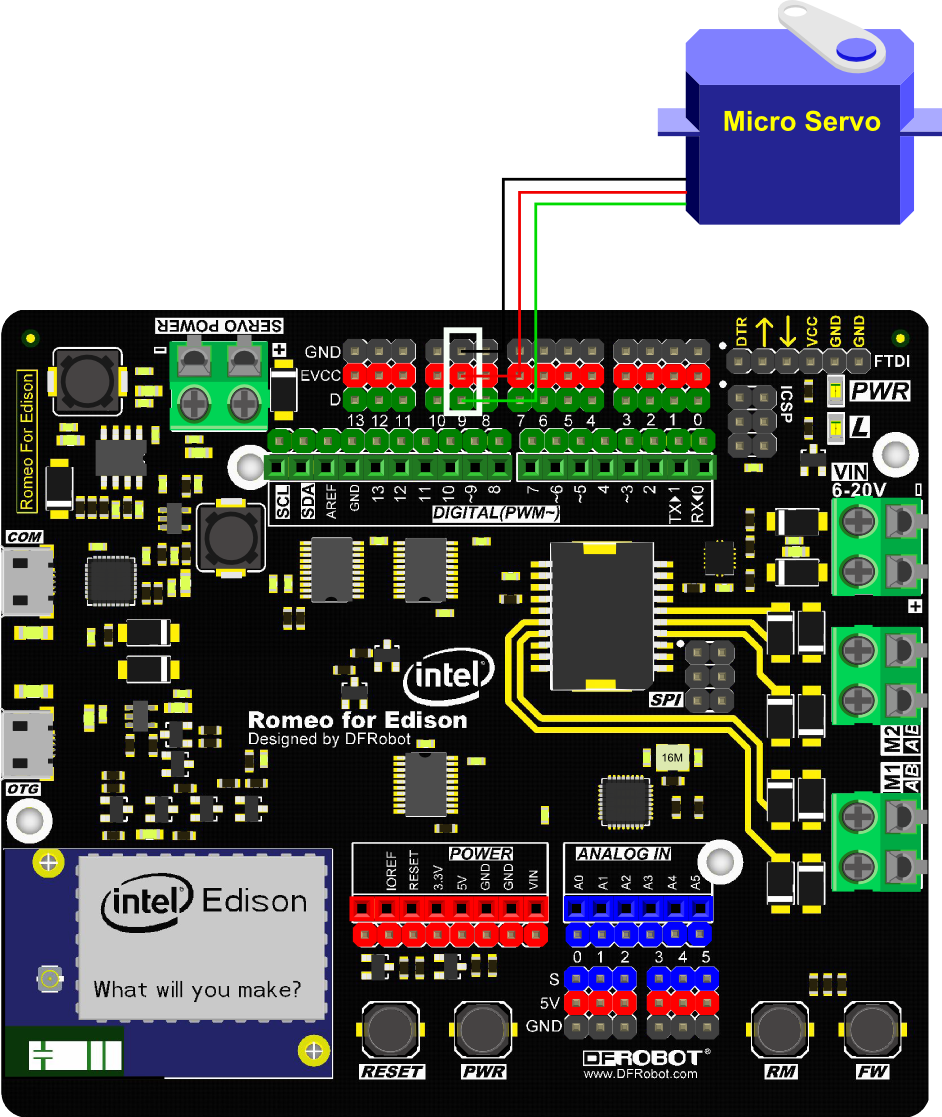 1x micro USB数据线 1x Romeo for Edison Controller板 【软件编程】 #include <Servo.h> // 声明调用Servo.h库 Servo myservo; // 创建一个舵机对象 int pos = 0; // 变量pos用来存储舵机位置 void setup() { myservo.attach(9); // 将引脚9上的舵机与声明的舵机对象连接起来 } void loop() { for(pos = 0; pos < 180; pos += 1){ // 舵机从0°转到180°,每次增加1° myservo.write(pos); // 给舵机写入角度 delay(15); // 延时15ms让舵机转到指定位置 } for(pos = 180; pos>=1; pos-=1) { // 舵机从180°回到0°,每次减小1° myservo.write(pos); // 写角度到舵机 delay(15); // 延时15ms让舵机转到指定位置 } } 【效果】 舵机从0°-180°,再从180°转回0°。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






