|
12990| 3
|
[项目] 哨声控制机器人 |

|
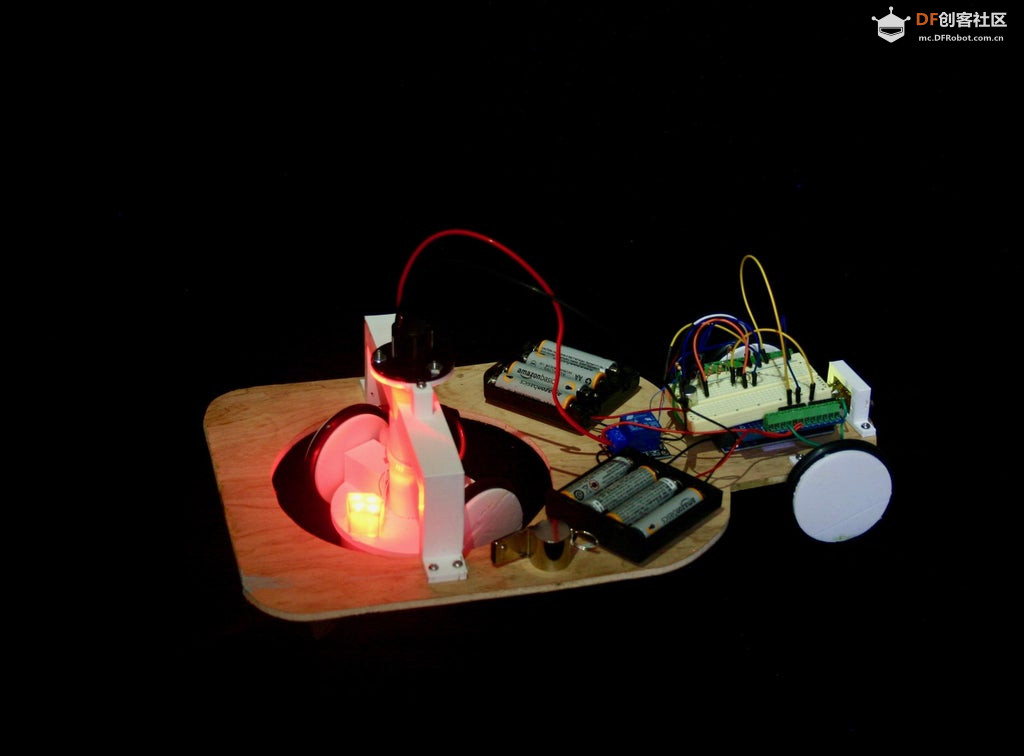
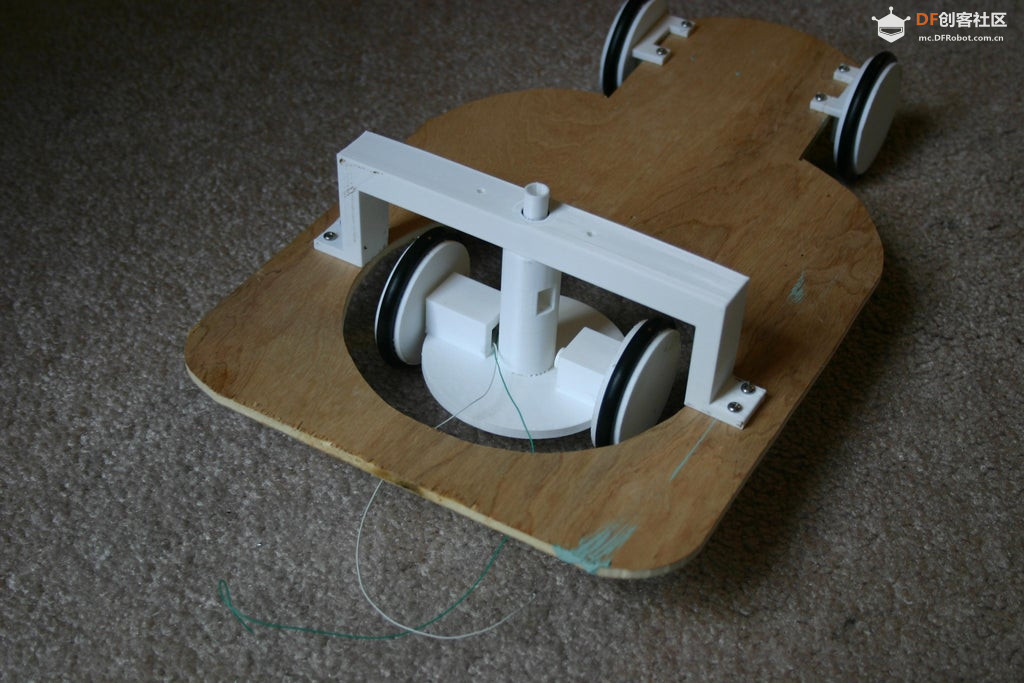
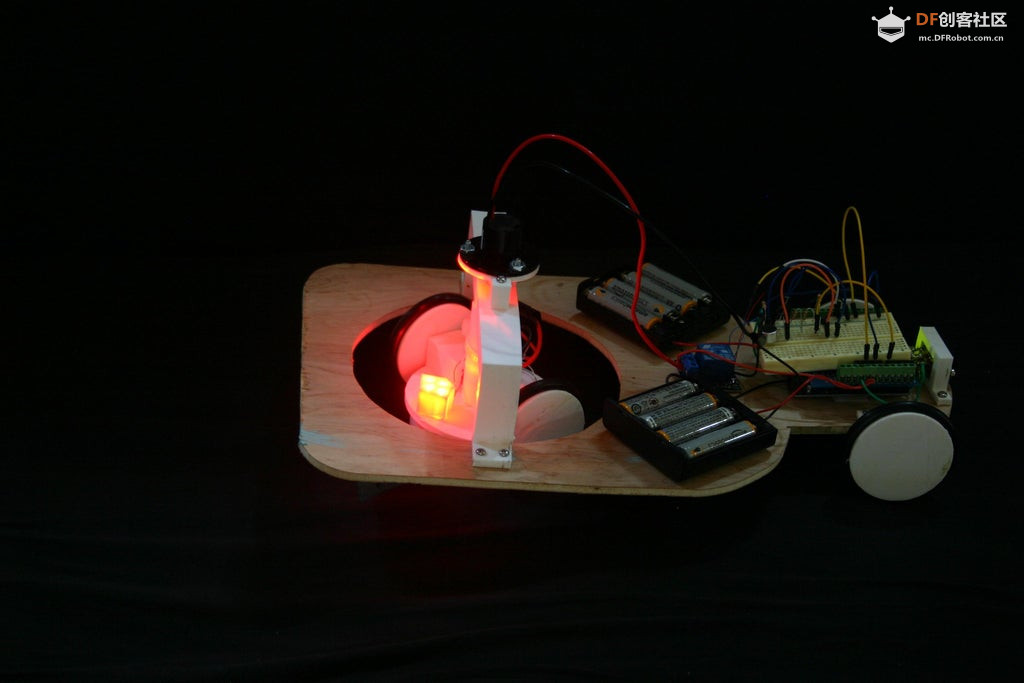
打开电源后,机器人将按照前驱动轮机构上亮起的箭头指示的方向移动。哨声一响,前轮就会转向。停止鸣笛,机器将继续朝箭头指示的方向移动。 驱动电机在前进模式下移动机器人,在反向模式下它旋转驱动轮组件。要使所有这些操作正常工作,需要两个单向轴承、滑环、声音探测器和单刀双掷继电器。 所需材料:
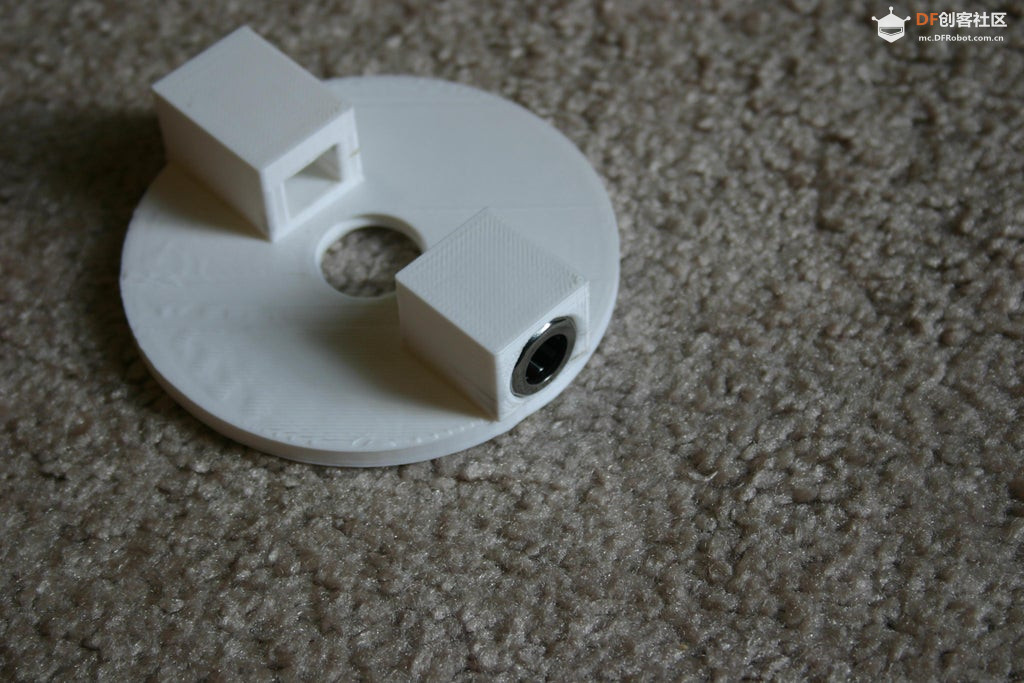
步骤1打印3D零件并准备制作机器人。 步骤2
将单向轴承插入驱动轮组件。 步骤3
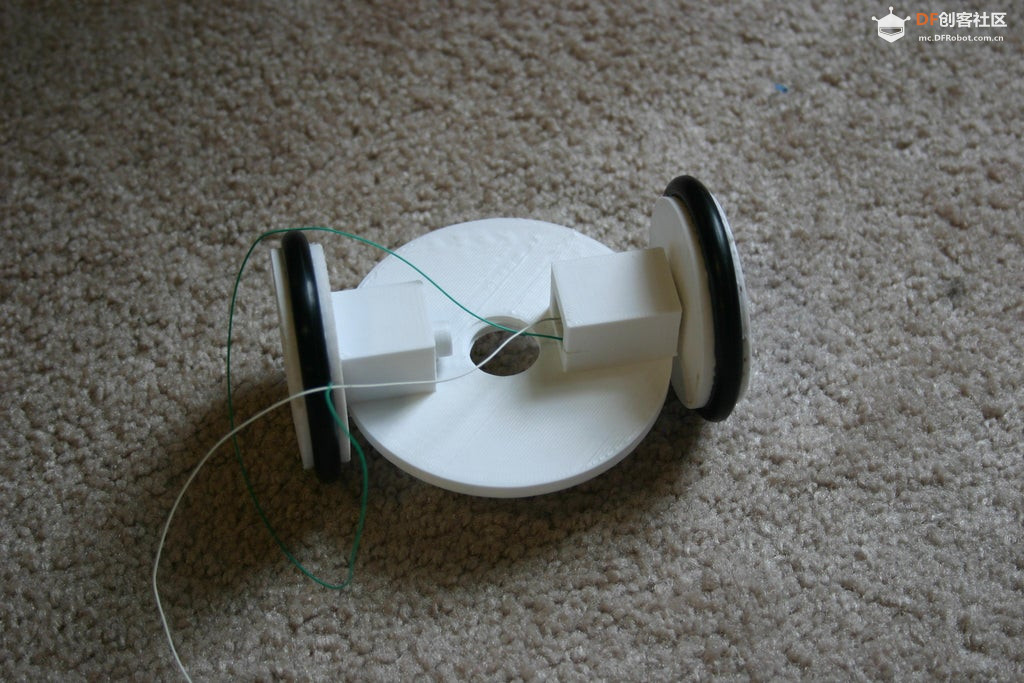
将橡胶圈套在自由转向(单向)驱动轮上。 步骤4
将橡胶圈套在电机驱动轮上。连接电机并将小号导线焊接到电机上。 步骤5
将车轮插入驱动组件。 步骤6
将立轴拧入驱动组件。 步骤7
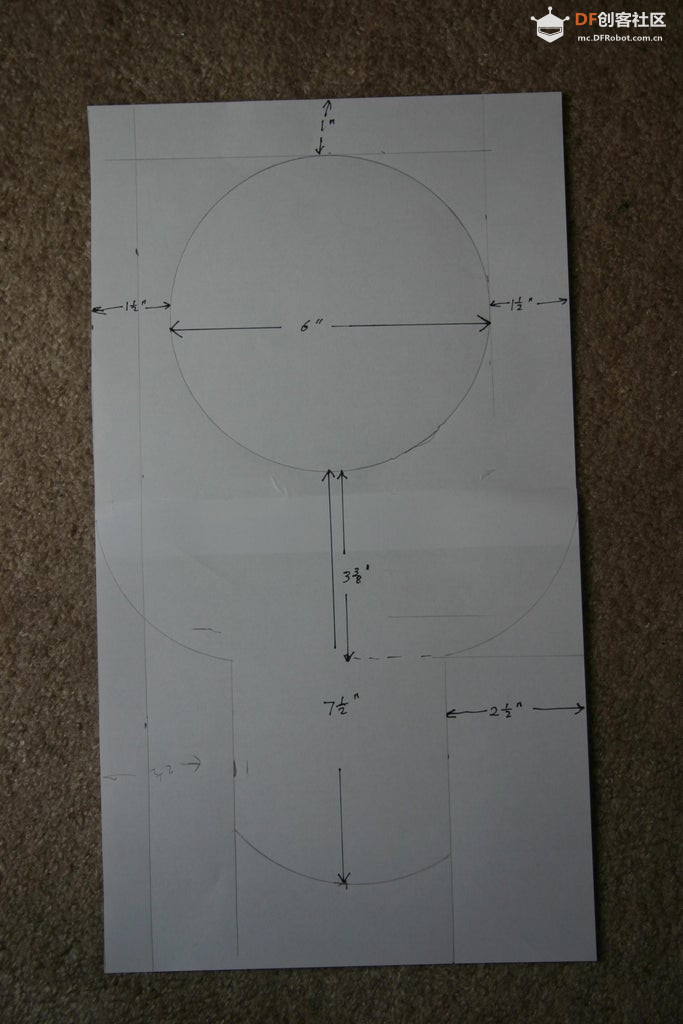
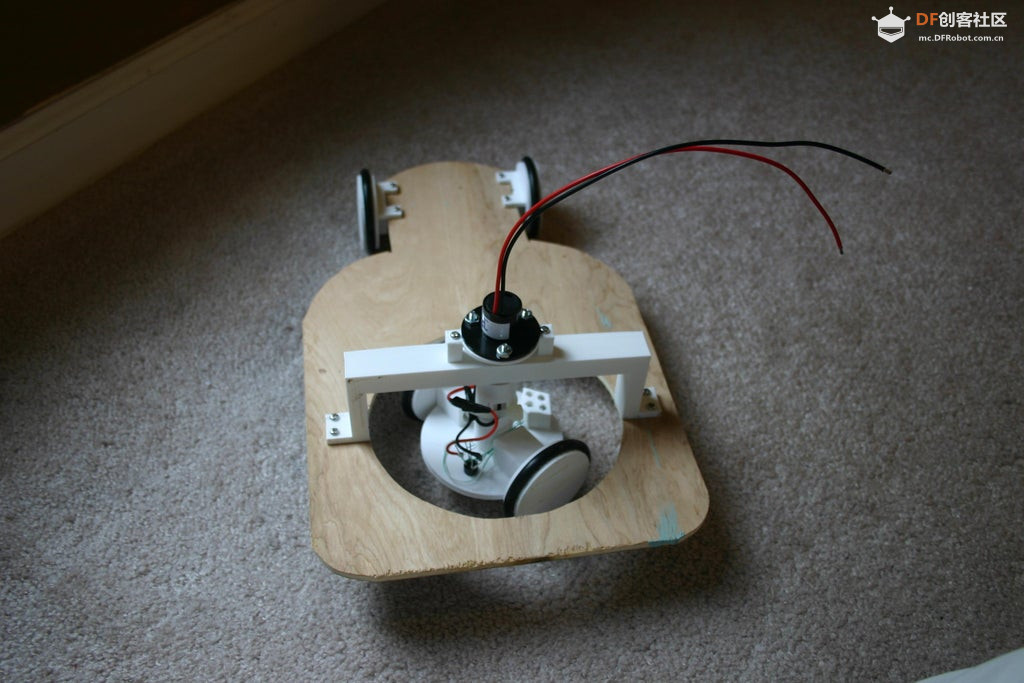
从一块1/4英寸的胶合板上裁剪下底盘。 步骤8
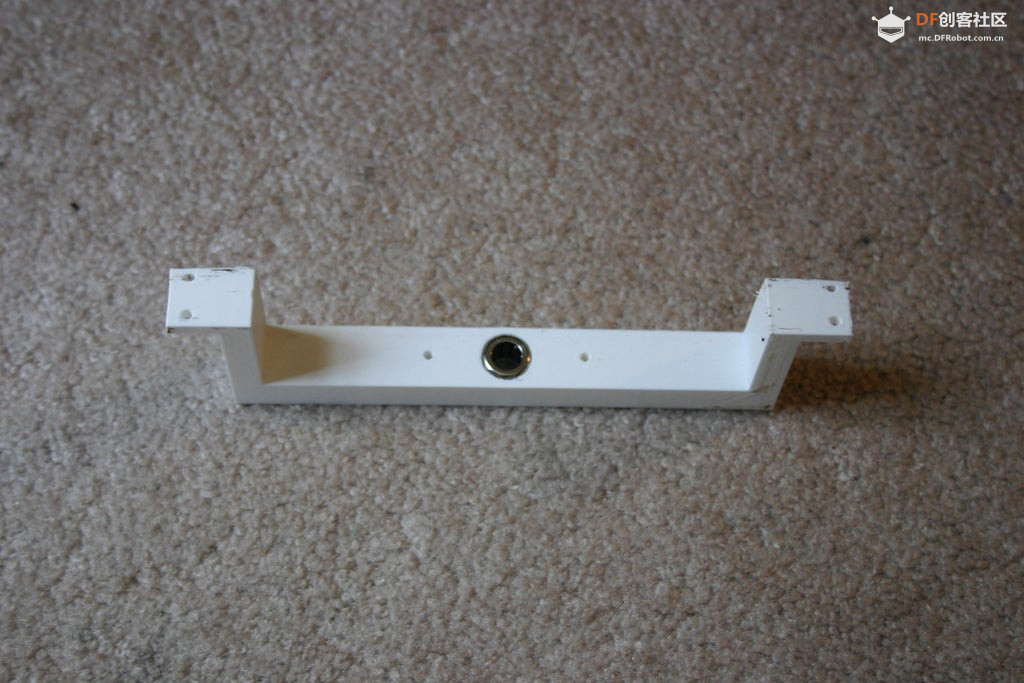
将轴承插入后轮组件。将车轮插入轴承。 步骤9
将后轮拧到胶合板底盘上。 步骤10
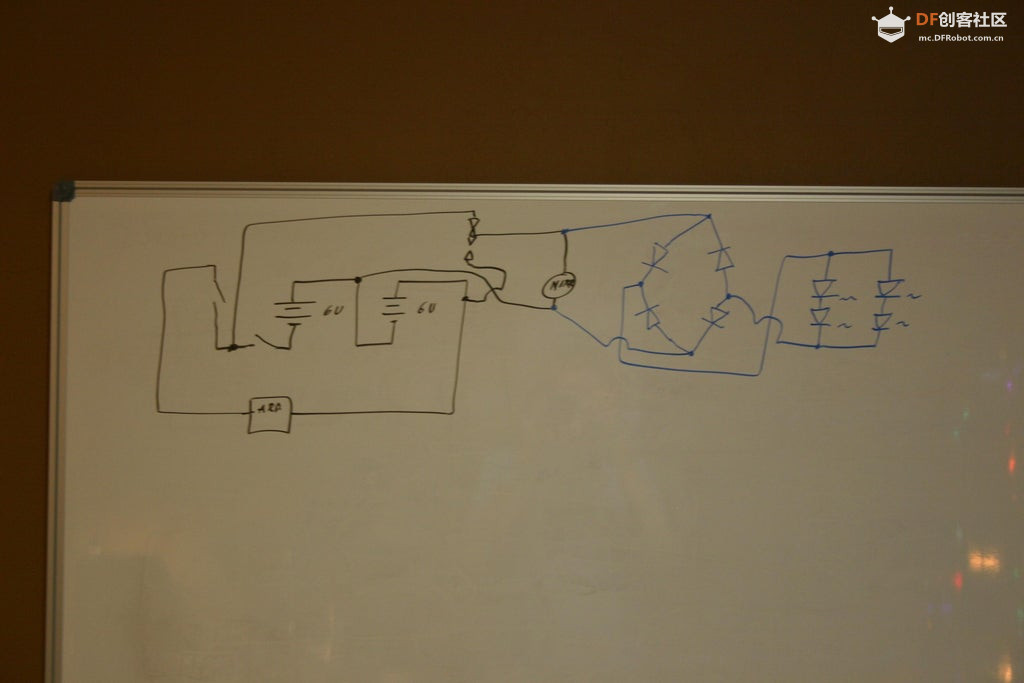
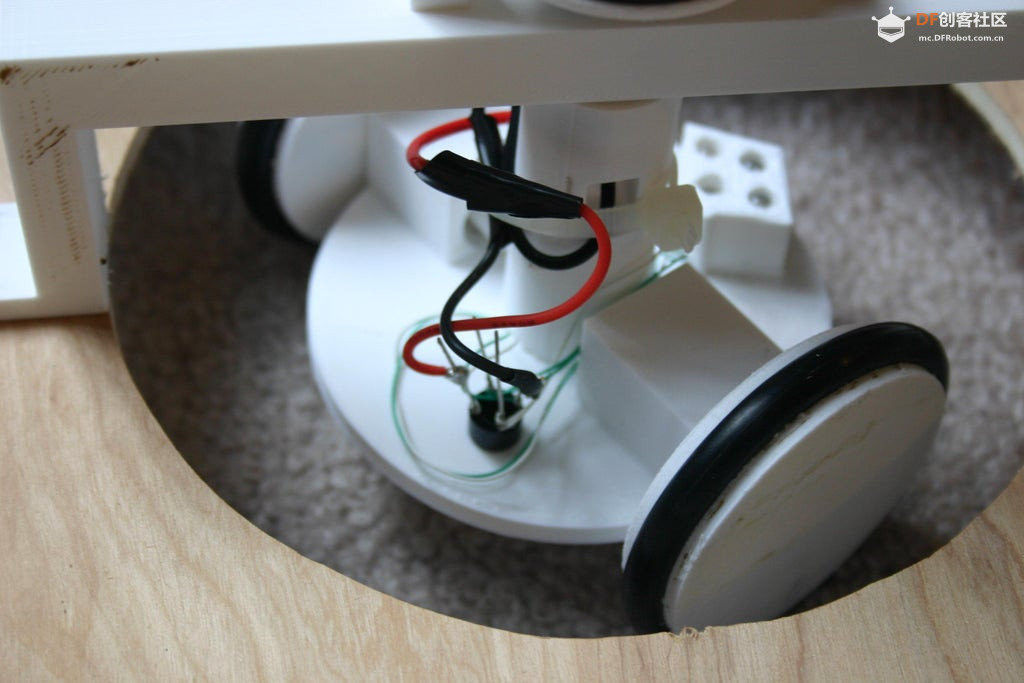
根据电路示意图连接箭头。 步骤11
将箭头粘到旋转底座上。我用烙铁把两者熔在一起--用胶水也可以。 步骤12
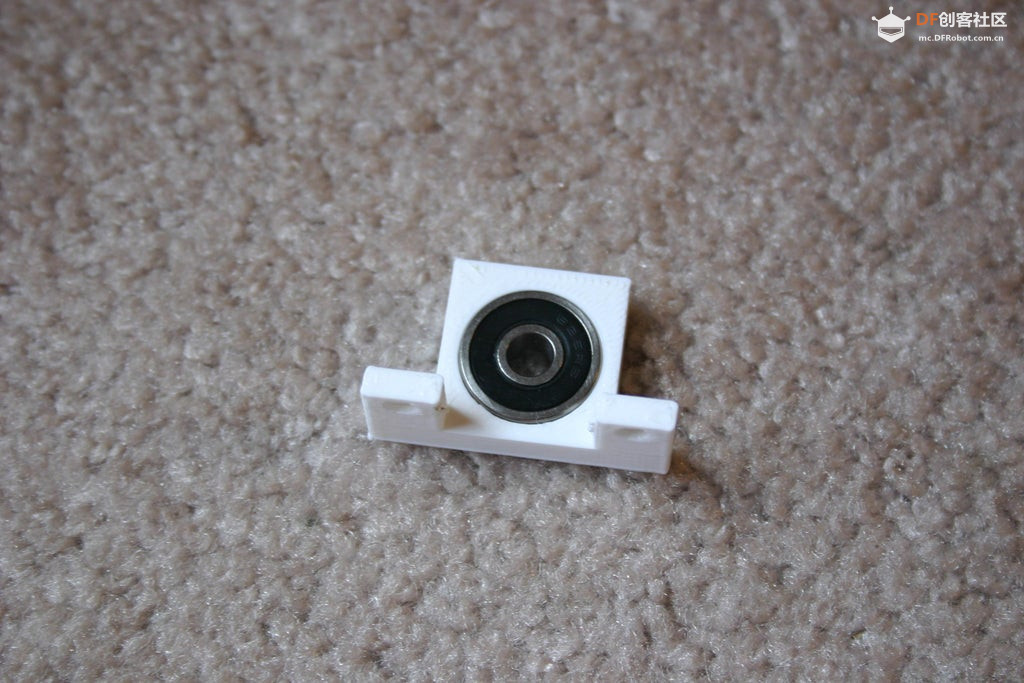
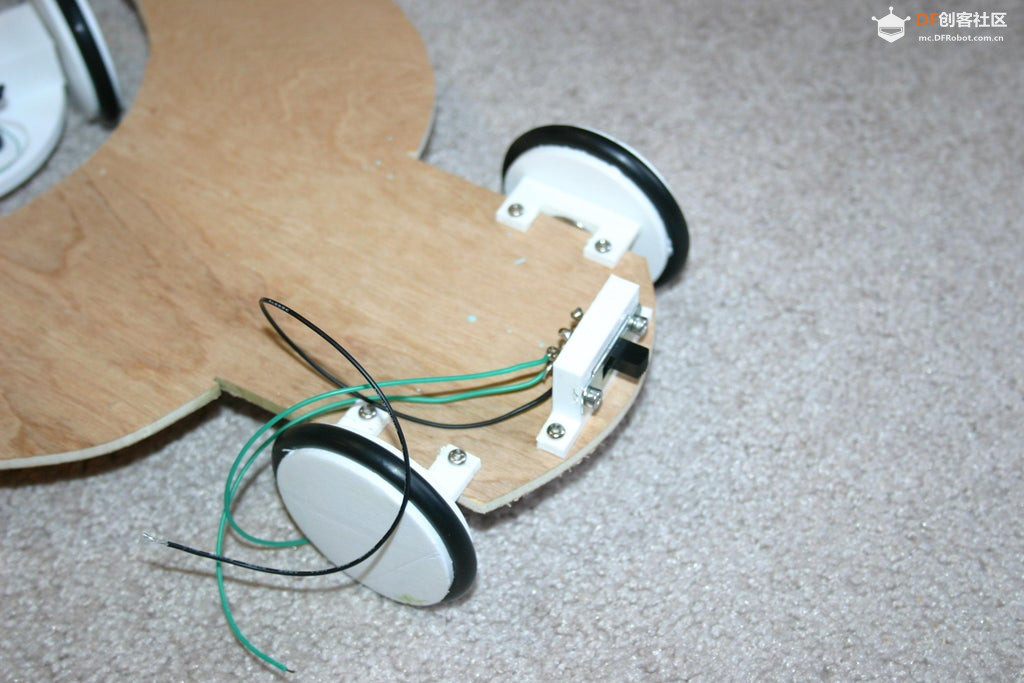
将单向轴承插入轴承座。将轴承座拧到胶合板底盘上。 步骤13
将车轮组件插入轴承座。 步骤14
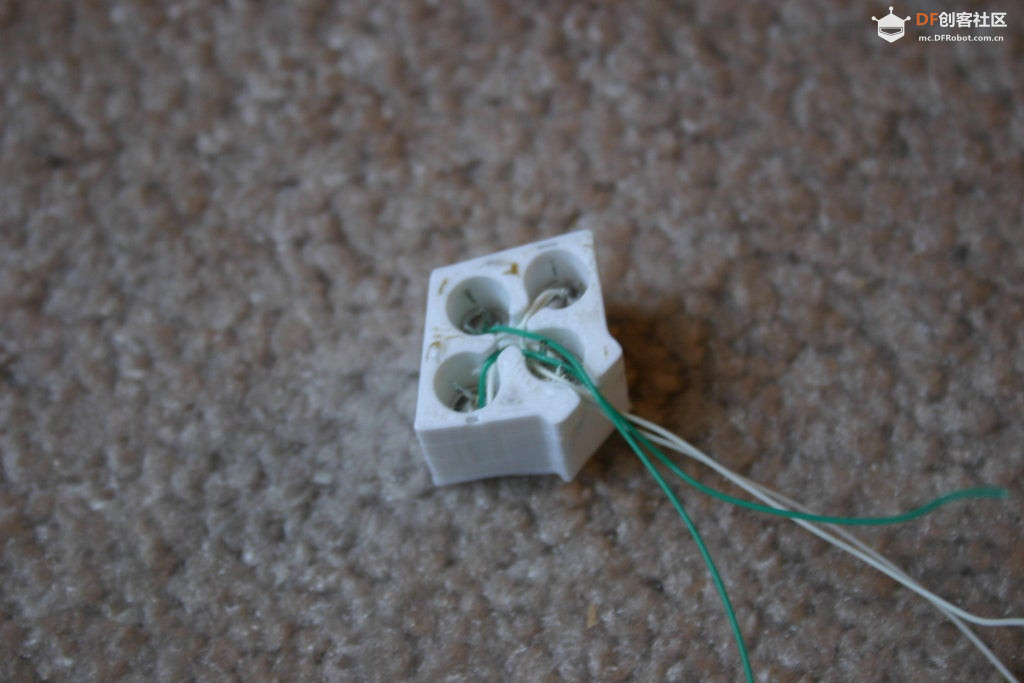
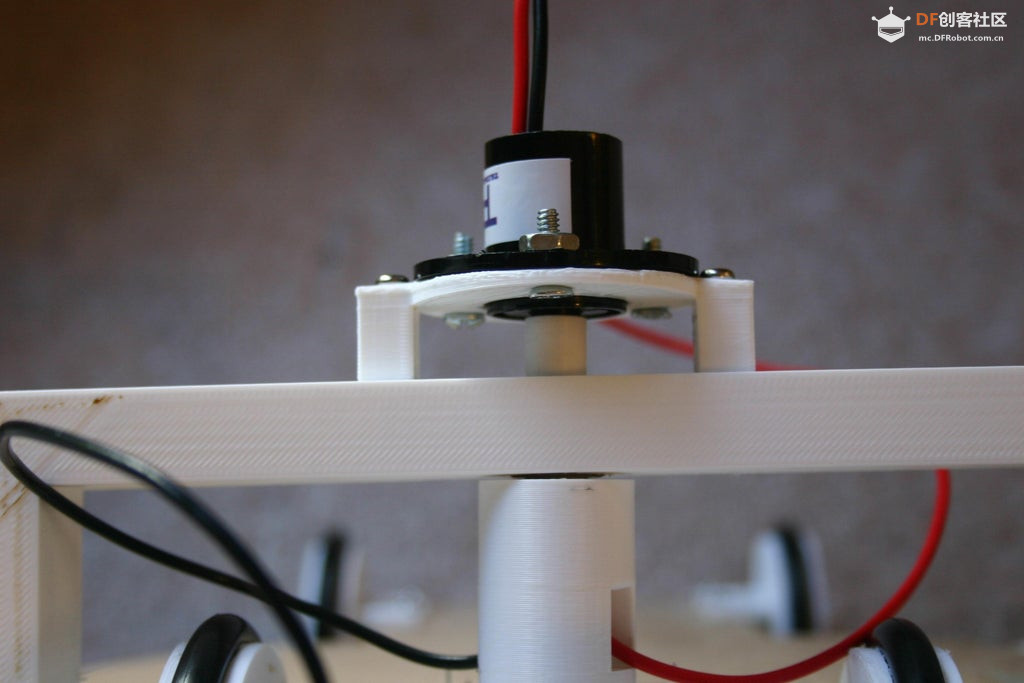
将滑环安装到滑环支架上。 步骤15
将导线穿过垂直轴承,并将滑环固定器安装到轴承座上。 步骤16
将导线连接到二极管电桥上。 步骤17
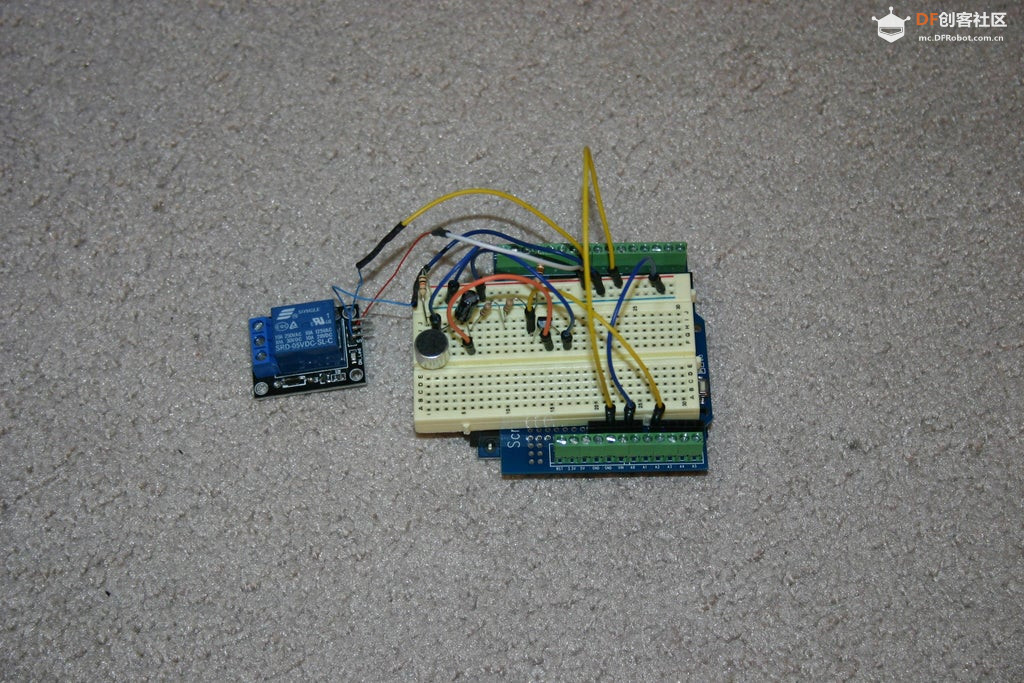
在面包板上连接好麦克风和放大电路。连接到Arduino并上传代码。 下载完整代码: 步骤18
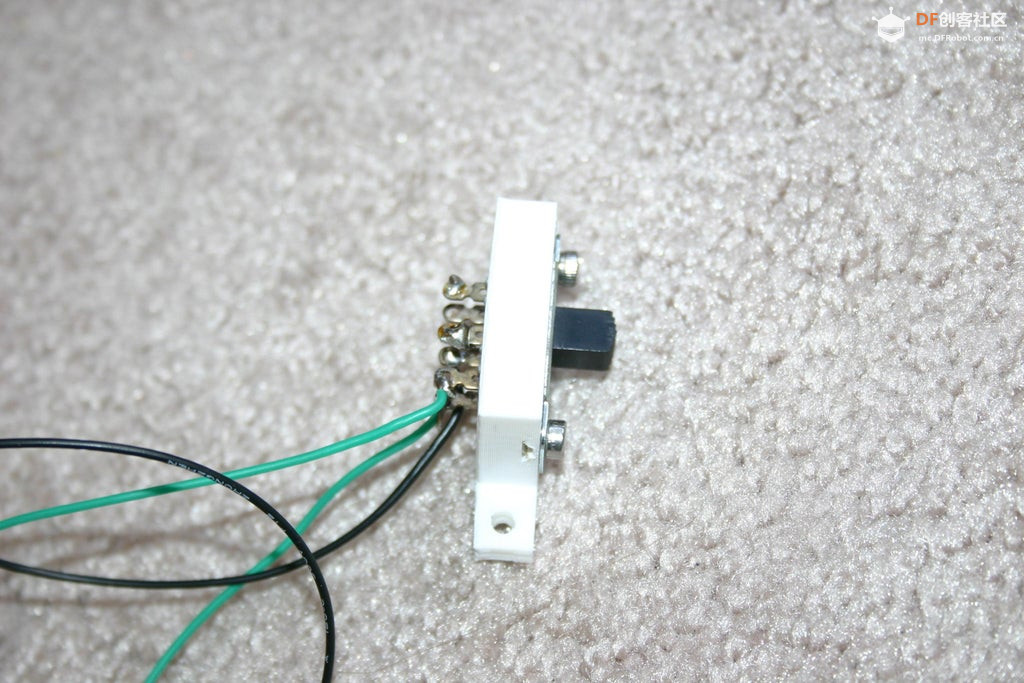
连接开/关机功能的双刀双掷开关,并安装到底盘的背面。 步骤19
使用魔术贴安装电池盒、继电器和Arduino。 步骤20
打开电源开关,你就拥有了一个(嘈杂的)声波控制的机器人。
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed





















 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








