|
7038| 4
|
儿童节,做一只会伸缩触角的大章鱼! |

本帖最后由 RRoy 于 2021-6-1 16:10 编辑  今天是六一儿童节,分享一个可爱一点的项目。 制作一只脾气“暴躁”的纸质章鱼,当感受到周围发出巨大的噪音时,会缩回触角! 材料
制作触手 先剪出一个触角: 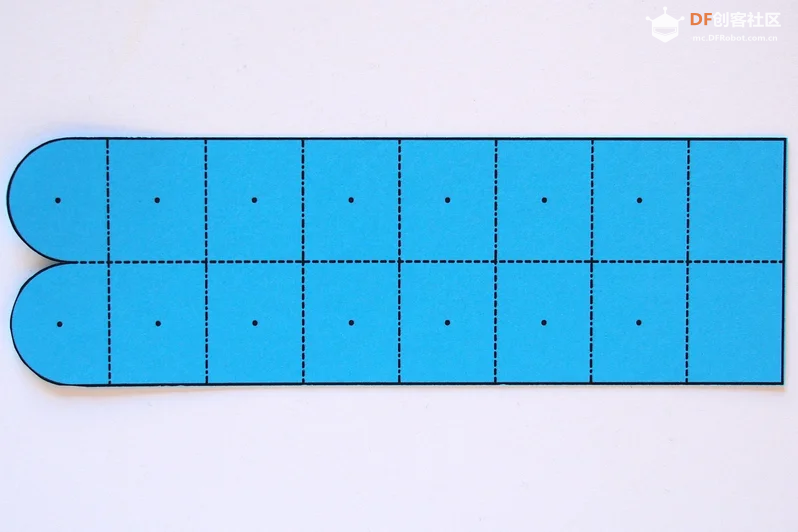 把它折成两半,带标记的一面朝外: 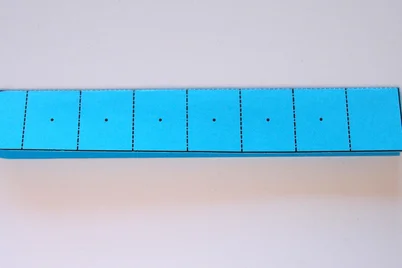 提示: 可以把触角对折,然后剪掉上面的圆形部分,这样可以节省一些时间。 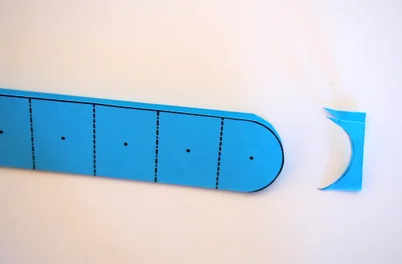 戳孔 用缝衣针在标记的位置打孔,确保穿过两层纸。 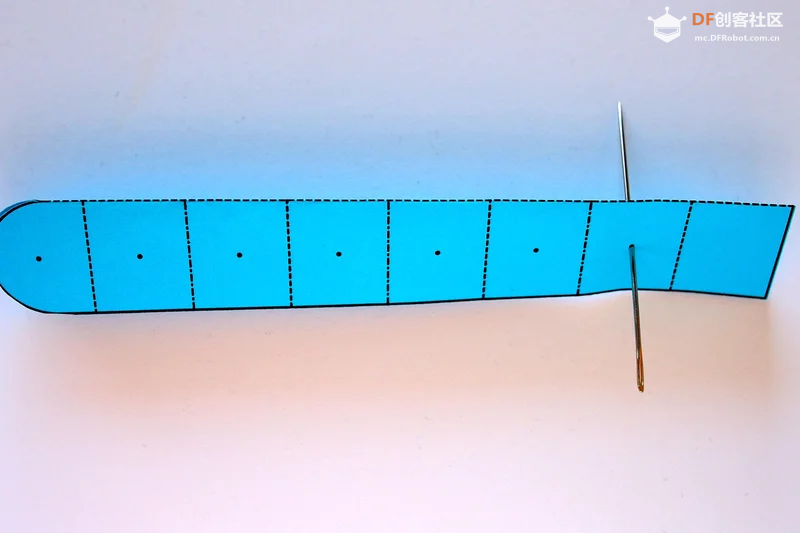 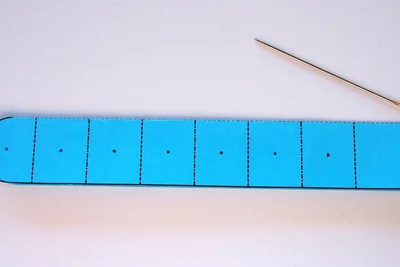 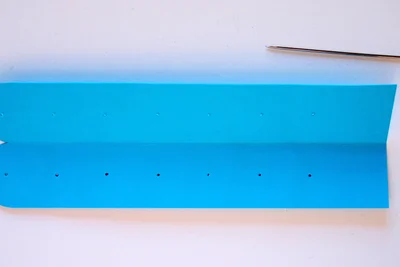 折出"之 "字形 把触角折成 "之 "字形: 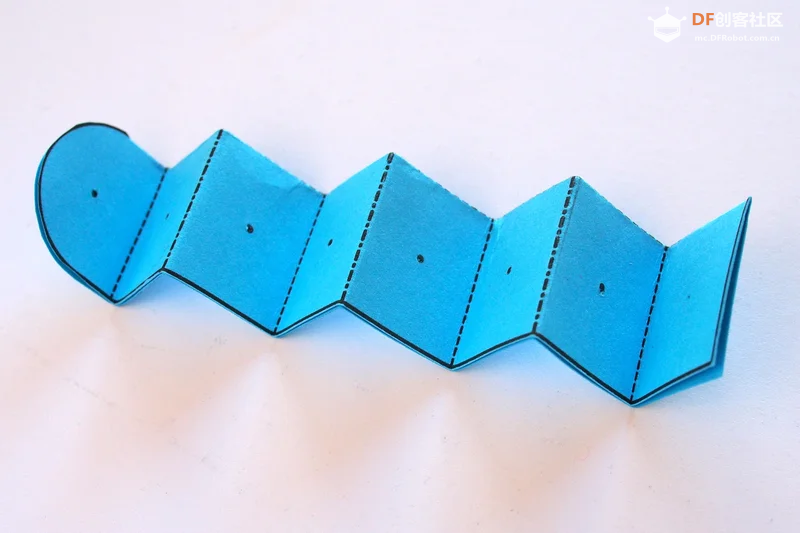 展开触角,然后从内向外重新折叠,这样带标记的一面就在里面了。 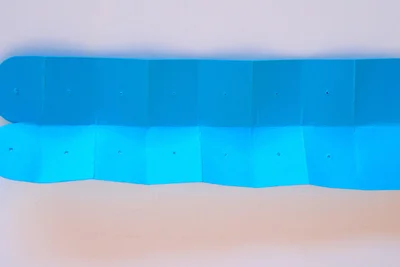 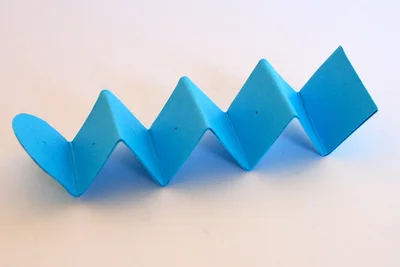 (非必需): 在对折时加上胶水,把两层固定在一起(其实没有必要,因为没有胶水它也能很好地保持形状) 缝纫线准备 剪一段长约30cm的线:  在线的末端打两个或三个结,然后穿上针。  缝制触角 利用我们在步骤2中打的孔确定好位置,把线缝在触角上: 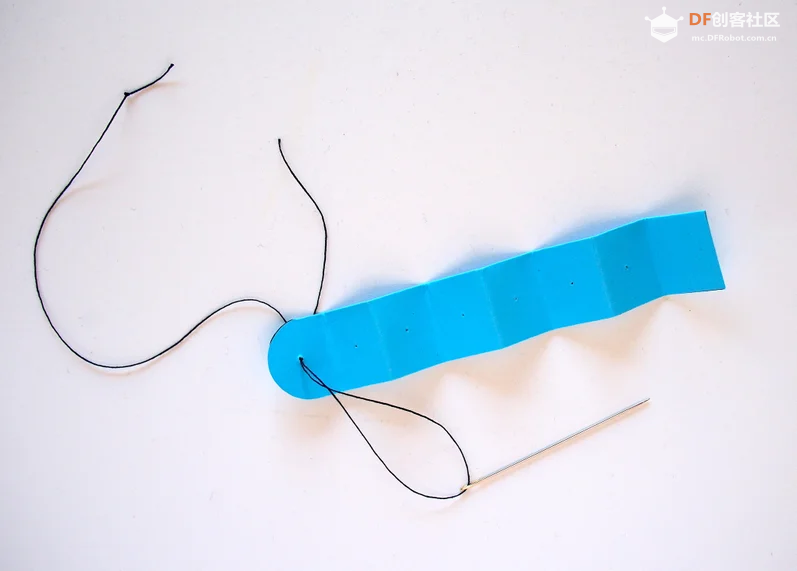 确保缝纫线从触角的圆端开始,并在之字形折痕的外侧: 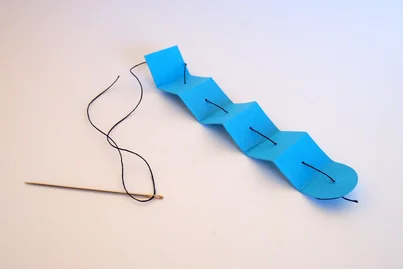 小细节: 在结上滴一滴胶水(或胶带),好让它不会拉破纸。 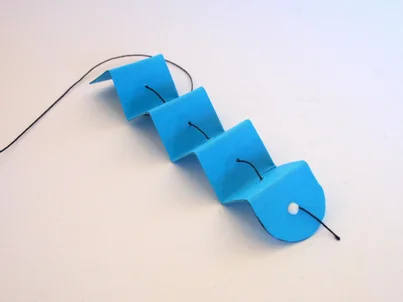 制作更多的触手 重复上述步骤,做好其余的7只触手。 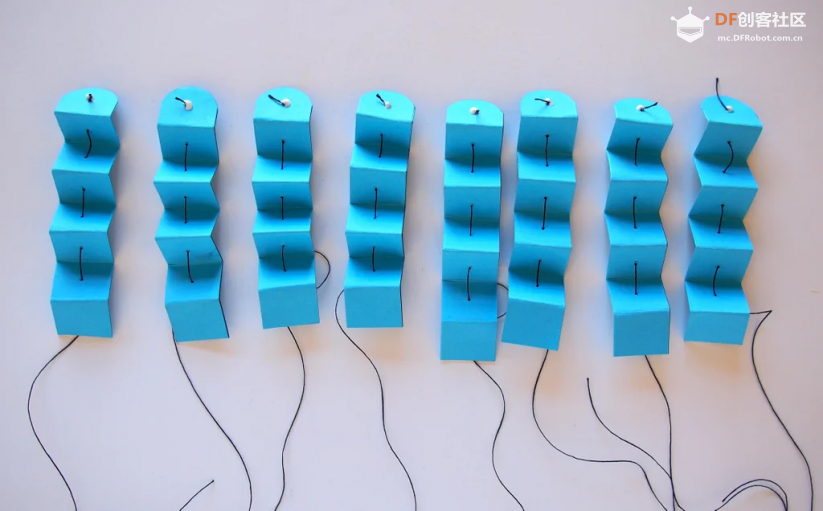 暂时把腿放在一边,让胶水变干。 制作身体部分 剪下提供的模板上的头部和身体部分。 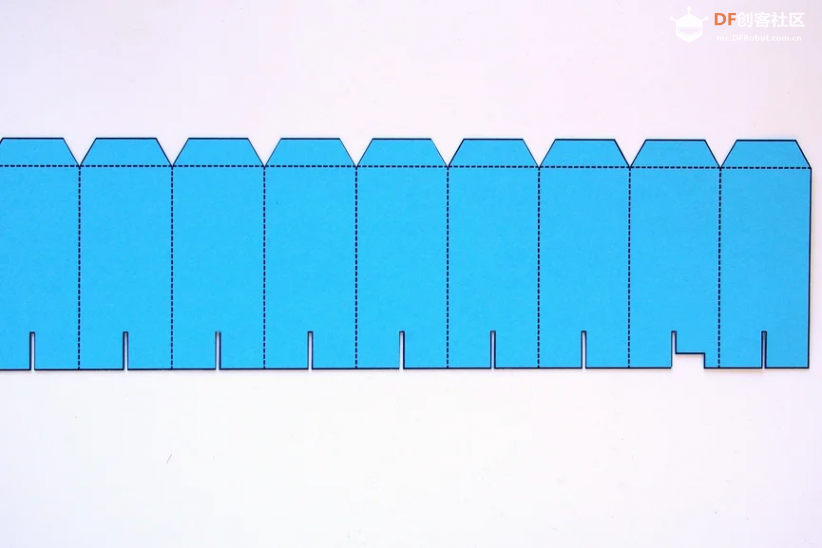 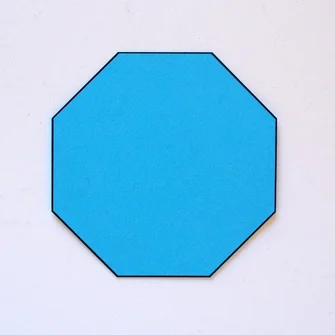 按照模板上的标记折叠: 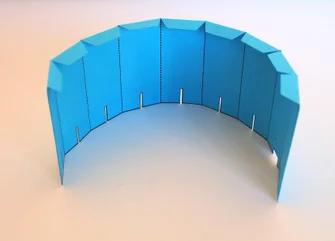 组装身体和头 将身体部分粘成八角形(两端的两个部分相互重叠,形成8个边)。  盖上盖子: 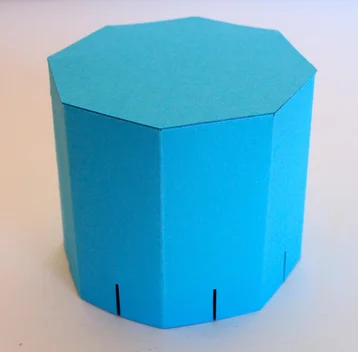 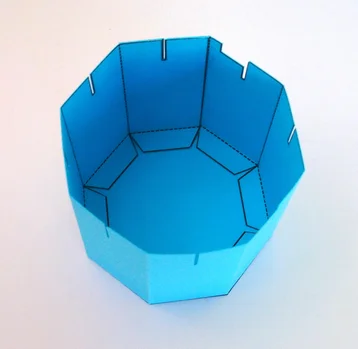 自由发挥部分 当然这个身体部分,大家也可以自由发挥,比如做成这样: 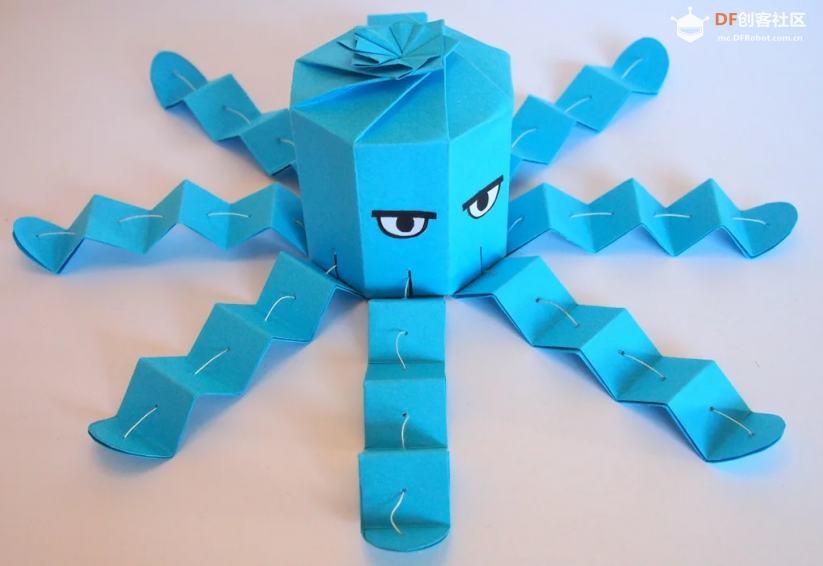 制作底座 用提供的八角底板模版,在纸板上描出一个八角形: 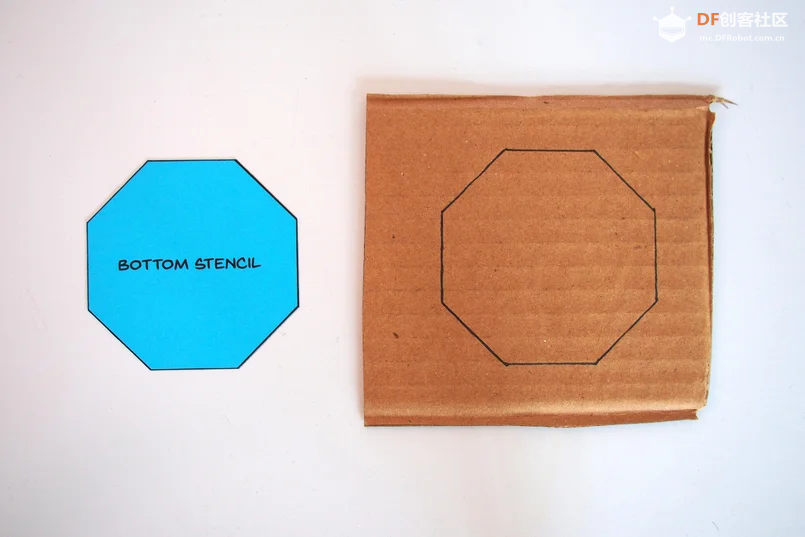 用纸板切出底座的八角形: 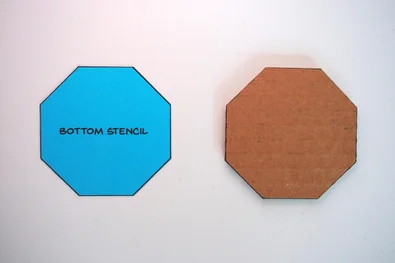 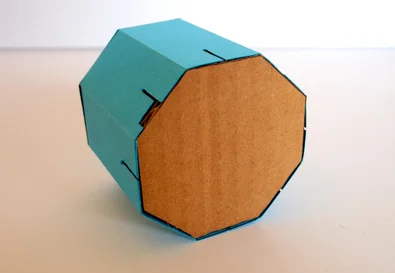 安装触手 把舵机支架粘在八爪鱼的纸板底座上。 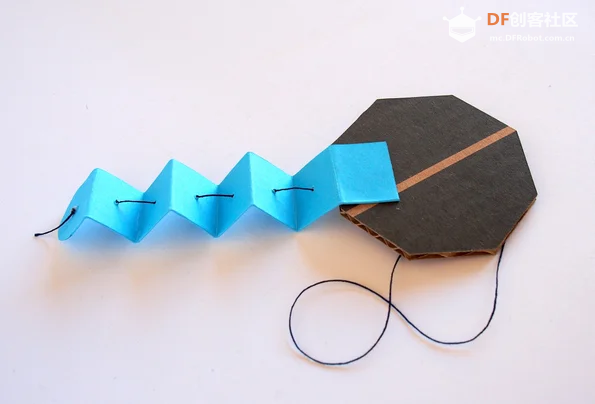 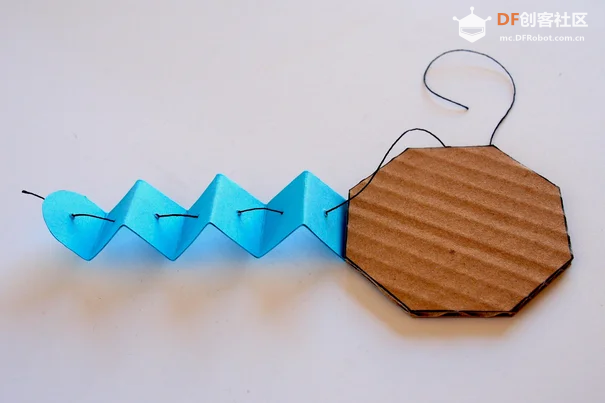  注意,舵机本身并不在底座的中心--舵机的轴应该是近似于中心的。 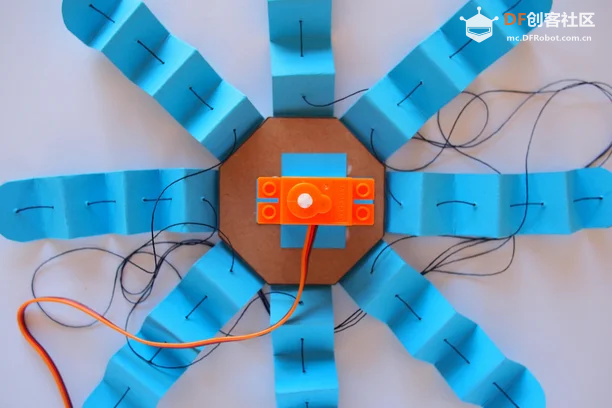 准备吸管 切一段大约2cm的吸管: 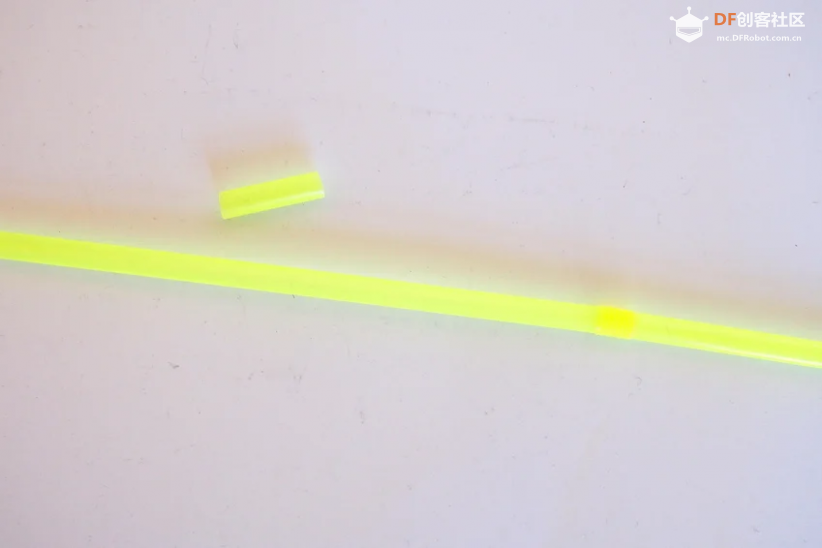 用针在吸管中间戳一个洞: 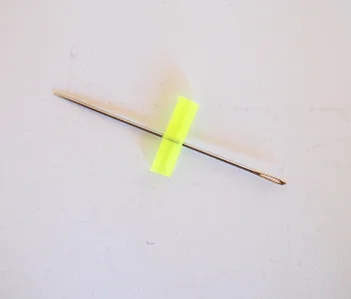 在吸管的一段再戳一个洞(这个只需要刺破一侧就行)。  检查吸管的尺寸 把吸管套到舵机上:  确保吸管紧紧地贴在上面:  吸管穿线 将其中一块线头缝在吸管上:  先穿过中间的小孔,然后从上面往上缝:  完成之后是这样的: 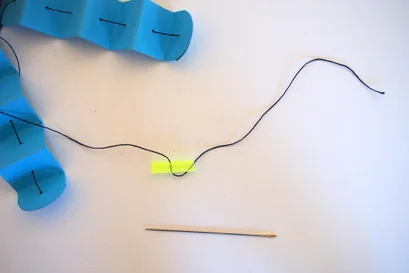 重复完成其他缝线 最好一次只缝一条线,避免它们缠绕在一起。 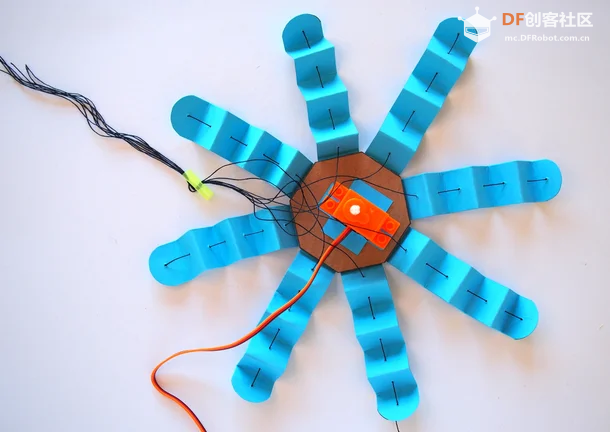 检查吸管和触角之间的线的长度是否大致相同。 我们可以通过拉起吸管来检查线的张力是否大致相同。 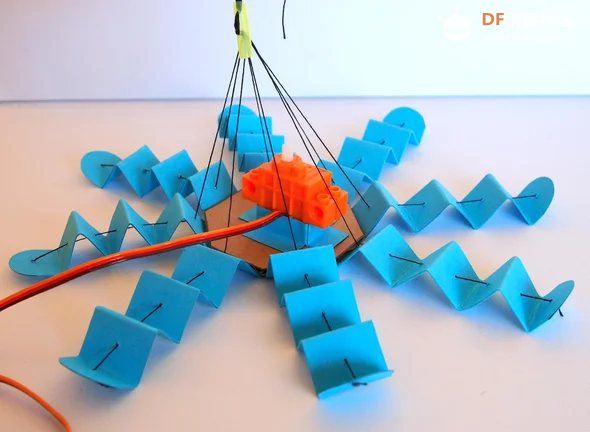 连接 将吸管装到舵机上,一定要确保它是紧的(如果是松的,轴只会在吸管内旋转而不转动吸管本身)。 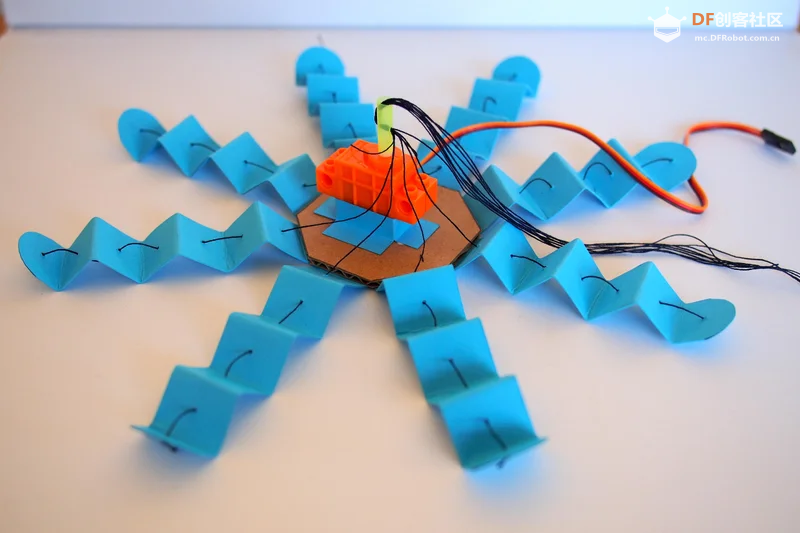 确保触角都完全伸展,然后在吸管的线头出口处打一个大结: 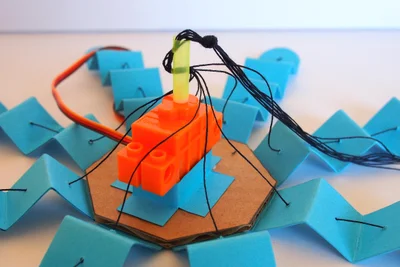 修剪多余的线: 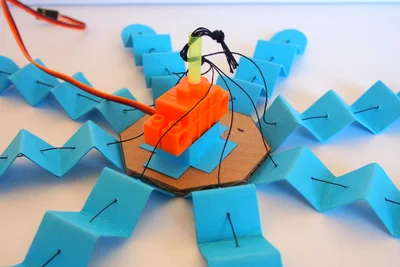 连接电路 把舵机与micro:bit 连接起来。 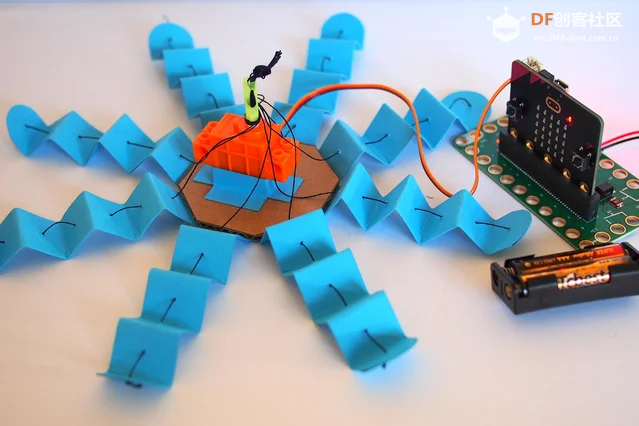 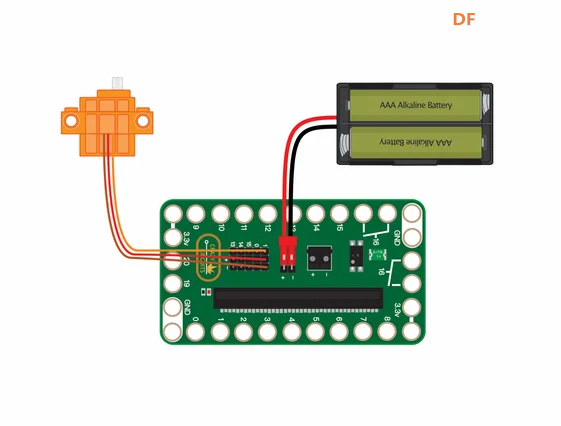 上传代码  细心的小伙伴可以看到,上面的代码想要触发章鱼收缩触角,需要同时满足两个条件,logo is pressed 和 sound level > 128,这样做的目的是为了避免在嘈杂的环境中意外地触发。 当然我们还可以用其他的传感器来设定它触发的调节,比如加速度传感器、光敏传感器、超声波传感器等等,大家可以自己发挥。 测试一下 在我们组装身体之前,先来测试一下:  使用A和B按钮,尝试缩回和伸出触角。 提示:对于TentacleAction功能,试着调整时间和速度测试一下不同的效果。 根据线的松紧程度,我们可能需要在触发TentacleAction功能之前使用A按钮预先将线缠绕在轴上。 组装身体 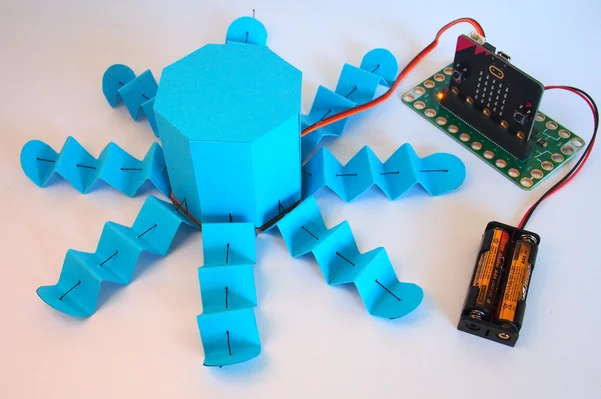 细节如图所示:  画脸 给章鱼画上眼睛和眉毛(这一步应该在上一步之前做比较好):   按住按钮,然后大喊一声,“哪里跑!”,让八爪鱼缩回它的触角! 项目作者: jrflorentine 该译文首发于DF创客社区 转载请务必注明项目出处与原作者信息 往期项目回顾 ▼ 能跑能跳能遛弯儿,波士顿动力Spot的小跟班来了!  ▼ 可扩展性高,四足机器人斯坦福Pupper的小弟来了!  ▼ 动手做一只基于ESP32的小型四足机器狗  |

673.18 KB, 下载次数: 5157



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






