|
3259| 0
|
[官方资料] NVIDIA Jetson Nano 2GB 系列文章(47):组装过程的注意细节 |
|
假如您的 Jetbot 小车是从外面采购第三方套件的话,可以跳过本文的内容。如果您是按照 jetbot.org 原厂的自行组装方式,那么本文所提供的一些细节点,会让您节省很多摸索的时间。 在原厂所提供的料件表(https://jetbot.org/master/bill_of_materials.html)中的采购链接,都是以亚马逊为主的国外电子商务平台,其中电子类元件大部分是标准件,至少在硬件尺寸上的孔位大小与间距与是一致的,在国内淘宝上还是能找到。 但是最头痛的问题都是发生在非标准件的部分,包括 TT 驱动轮直径、辅助轮直径、固定螺丝直径、杜邦线长度、充电宝长宽高、供电用的 USB 接头与长度等等尺寸,都是会影响成败的小细节,看起来都是微不足道之处,但任何一项没处理好就会功亏一篑。 本文的重点,就是将组装过程中可能造成模糊或出错的地方为读者梳理一遍,让大家少走冤枉路、减少挫折感,尽快完成 Jetbot 智能小车的组装工程,然后顺利进入到后面的实验之中好好学习。接下去就逐项为大家说明这些组装过程的细节: 1. 选购与测试TT电机: 在淘宝上这类电机的单价从 1.5 元到 10 元不等,还区分为“加速比 48/120/200”、“单轴/双轴”、“带线/不带线”等细分规格:
这种低单价的电机会存在“质量一致性”的问题,也就是规格相同的电机也可能产生转速不一样的现象,重点就是看这些电机的转速有多大差距。比较保险的方式就是一次多采购几个,再从里面挑选出转速最接近的两个,这样可以大量节省时间上的消耗。 检测转速的方法,可以按照下图的方式将 Jetson Nano 2GB、DC-Stepper-Motor、充电宝一并连接起来,一方面测试电机转速,也同时验证这些设备的状态。 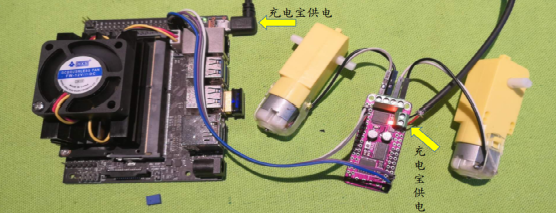 由于这两个 TT 电机是最先装到 Jetbot 车体里面,再依序安装 DC-Stepper-Motor 控制板、充电宝、Jetson Nano 2GB 等设备,如果等到全部装上后才发现到转速差距问题时,又得将所有设备全部拆掉,这个过程会令人十分挫折,因此建议在安装电机之前先做功能与性能的测试,这是非常必要的一个步骤。 2. 3D 打印车体、配套支架与 TT 车轮尺寸的关系: 在 ~/jetbot/assets 目录下有 6 个 .stl 文件,主要内容如下: (1)chassis.stl:如下图左Ⓐ的主车体部分 (2)camera_mount.stl:如下图左Ⓑ的 CSI 摄像头架 (3)下图右的Ⓒ与Ⓓ部分为 caster_should 与 caster_base 的辅助轮座,不过这两个文件还分为 60mm 与 65mm 两种尺寸,这个主要是为了匹配 TT 轮的尺寸。 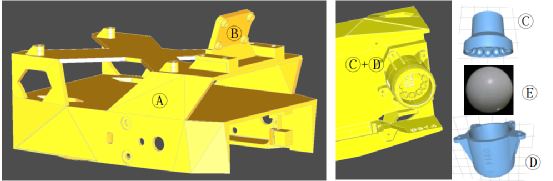 上面的 (1) 与 (2) 两个文件都需要,而 (3) 的部分则需要根据所选择的 TT 轮尺寸而定,总共需要 4 个 .stl 打印文件。最初 Jetbot 车体设计是以国外较常用的 60mm 车轮去设计,但在国内市场上反而是 65mm 规格的普及度较高,因此特别针对中国市场增加 65mm 尺寸的结构。 在淘宝网上透过“TT 轮 65mm”关键词搜索,能找到非常多合适的轮子,主流规格的车轮宽度有 26mm(下图中)与 15mm(下图左)两种,对 Jetbot 智能车来说,越薄的轮子在旋转时需要较小的空间,总体来说会有更好的灵活性,因此这里推荐选择 15mm 宽度的轮子。  如果在淘宝搜索“TT 轮 60mm”关键词,会出现非常多厚度在 28mm 左右的“麦克纳姆轮”(上图右),虽然造型非常抢眼也具有横向移动的特殊功能,但这个尺寸对于 Jetbot 来说就会显得太过厚重。 归结下来在 TT 轮的部分应该是挑选 65mm 比较合适,这样就能清楚 3D 打印文件的第(3)项该如何选择了。 受到 TT 轮尺寸的影响,也牵动前面Ⓔ项辅助滚球的尺寸,请在淘宝上搜索“高精密聚甲醛塑料球实心”,如果选择 65mm 的 TT 轮就对应选择 25.4mm 直径的小白球,如果选择择 60mm 的 TT 轮就对应选择 25mm 小白球。 确认 TT 轮尺寸之后,就能定下来所需要的 4 个 .stl 打印文件。如果自己有 3D 打印机的话,就可以按照https://jetbot.org/master/3d_printing.html所指示的步骤与参数进行输出,也可以找外面专门的 3D 打印服务单位去处理。 3. 充电宝的尺寸与供电: 这个看似再简单不过的设备,其实也存在一些细微问题,主要是以下两点: (1)尺寸:由于 3D 打印车体所预留给充电宝的空间尺寸为 128x70x20(mm),因此充电宝的外形尺寸,至少宽度与高度不能超出这个范围; (2)供电:由于需要同时对 Jetson Nano 2GB 与 2 个 TT 电机进行 5V 供电,因此至少需要两个 5V/2A 以上供电口,如果有 5V/3A 的更好。 4. 为Jetson Nano(含2GB)供电的USB电源线: 对 Jetson Nano 的 5V 供电,但因为 4GB 版本与 2GB 版本的供电口并不一样,再加上长度的要求,所以挑选过程会形成一定的困难度。 (1)4GB 版本:有 DC 与 MicroUSB 两种供电,需要使用跳线进行切换 ①USB 转 DC 接口:这种供电方式的电流比较稳定,但是 DC 接口必须为 2.1mm 规格。这种线并不难找,但麻烦的是线长得尽可能在 20cm 左右,如果超过 30cm 的话就会造成布线的困难。 ②USB 转 MicroUSB(Type-B):透过 Nano 的 MicroUSB 供电的稳定性稍差,最好将 Nano 运作模式调低到 5V 模式。这种线的长度大约在 10cm 左右最好,否则也会增加布线的难度。 (2)2GB 版本:USB 转 Type-C 弯头 Type-C 接口是 Jetson Nano 2GB 唯一的供电方式,因此没有别的选择,唯一的要求也是长度在20cm左右为佳。 最后有个“非必要”的细节,就是这些 USB 线最好能选择如下图的“弯头”接口,一则维持 Jetbot 的美观性,最重要还是为了缩小运动期间的所需要的空间。  5. 为DC-Stepper-Motor供电的USB电源线: 这个就非常简单,只要找到任何一条具备供电功能的USB线就可以,自行剪裁保留约20cm长度,然后拨开外表保护线,找到里面的红色与黑色漆包线,分别接上控制板5V供电口的正负极即可。 同样的,这个USB接口如果能找到如上图的90度弯头的是最好,但并非强制的。 6. 其他料件:这些就是剩下比较琐碎的部分,包括以下部分 (1)杜邦线:4 根双母头,长度推荐为 20~30cm,颜色推荐为红/黑/蓝/绿四种。 (2)M2 固定螺丝:用来固定 Jetson Nano(含2GB)、DC-Stepper-Motor 控制板、CSI 摄像头、辅助轮座等,长度 8mm,数量 20个。 (3)M3 螺丝螺帽:用来固定 TT 电机轮,螺丝长度 25mm,数量 4 组。 (4)双面胶:用来将充电宝固定在车体。 到此已将把 Jetbot 组装的相关物料选购细节与面临的问题全都说明清楚,主要还是因为原厂所提供的料件表与国内存在差异,但只要按照本文所提的注意要点去处理,就能减少很多冤枉路。  剩下的工作就是按照https://jetbot.org/master/hardware_setup.html的步骤,逐步将各个部件组装固定好,接下去就能开始有趣的 Jetbot 项目。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






