|
3997| 23
|
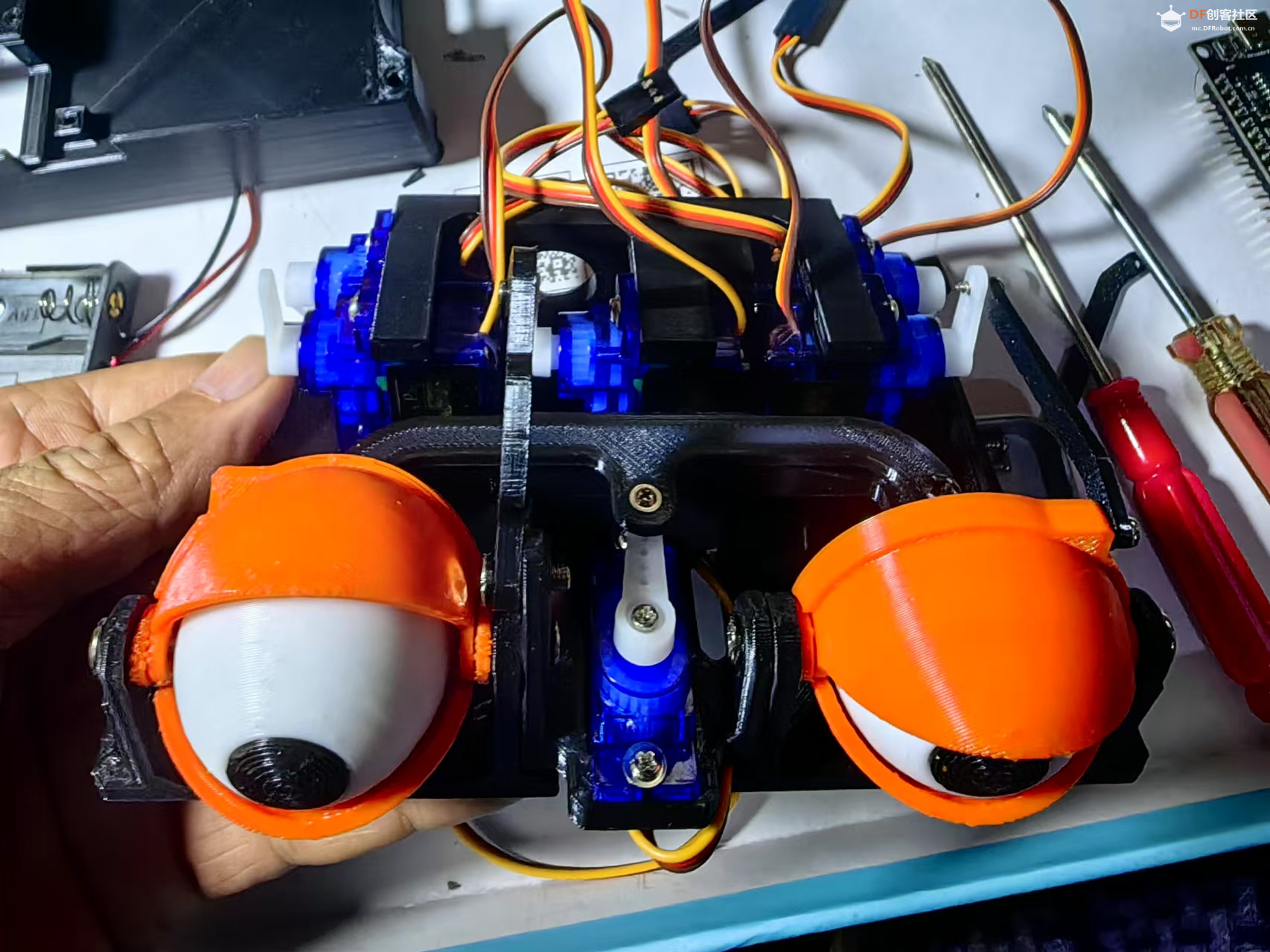
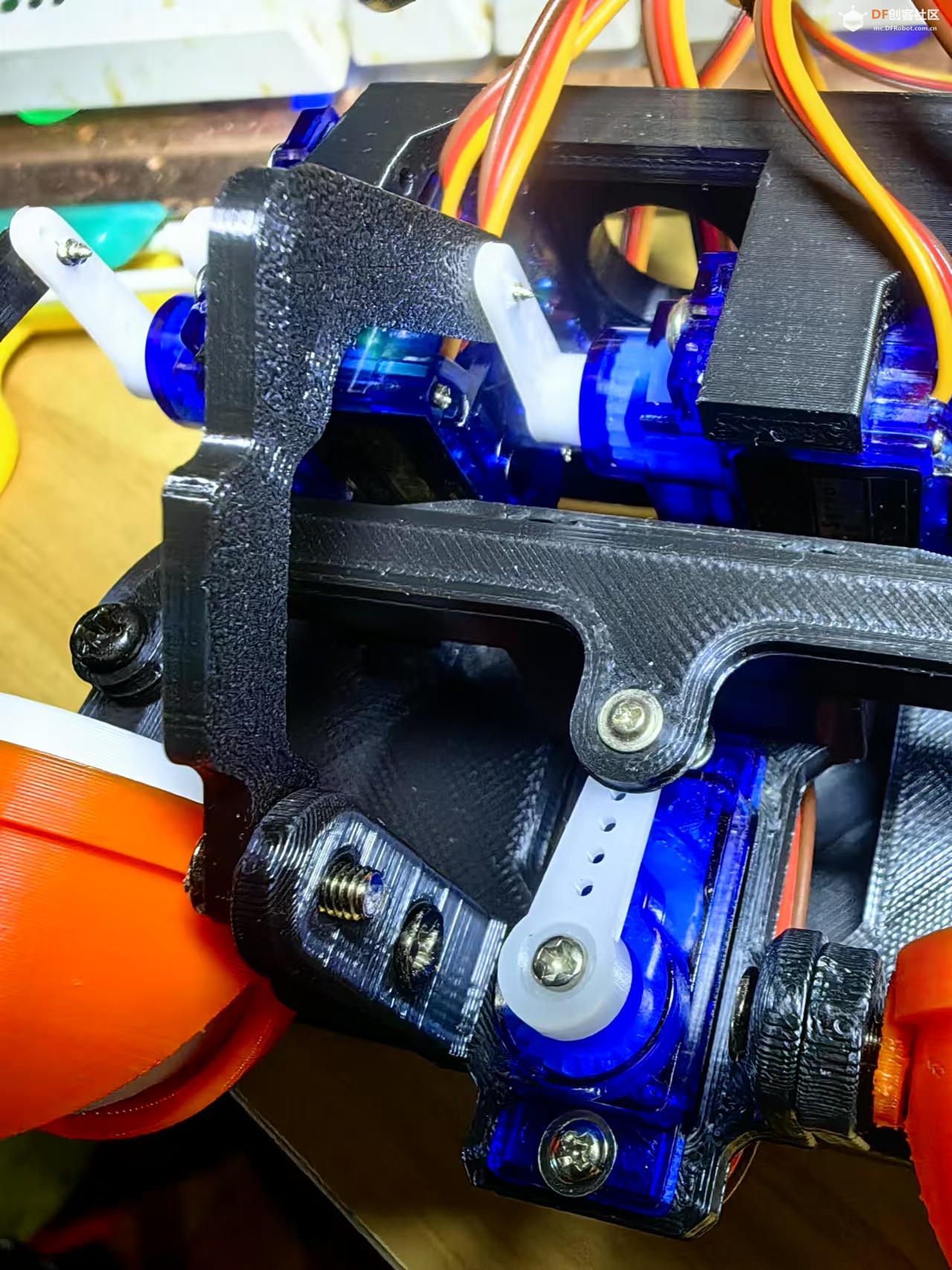
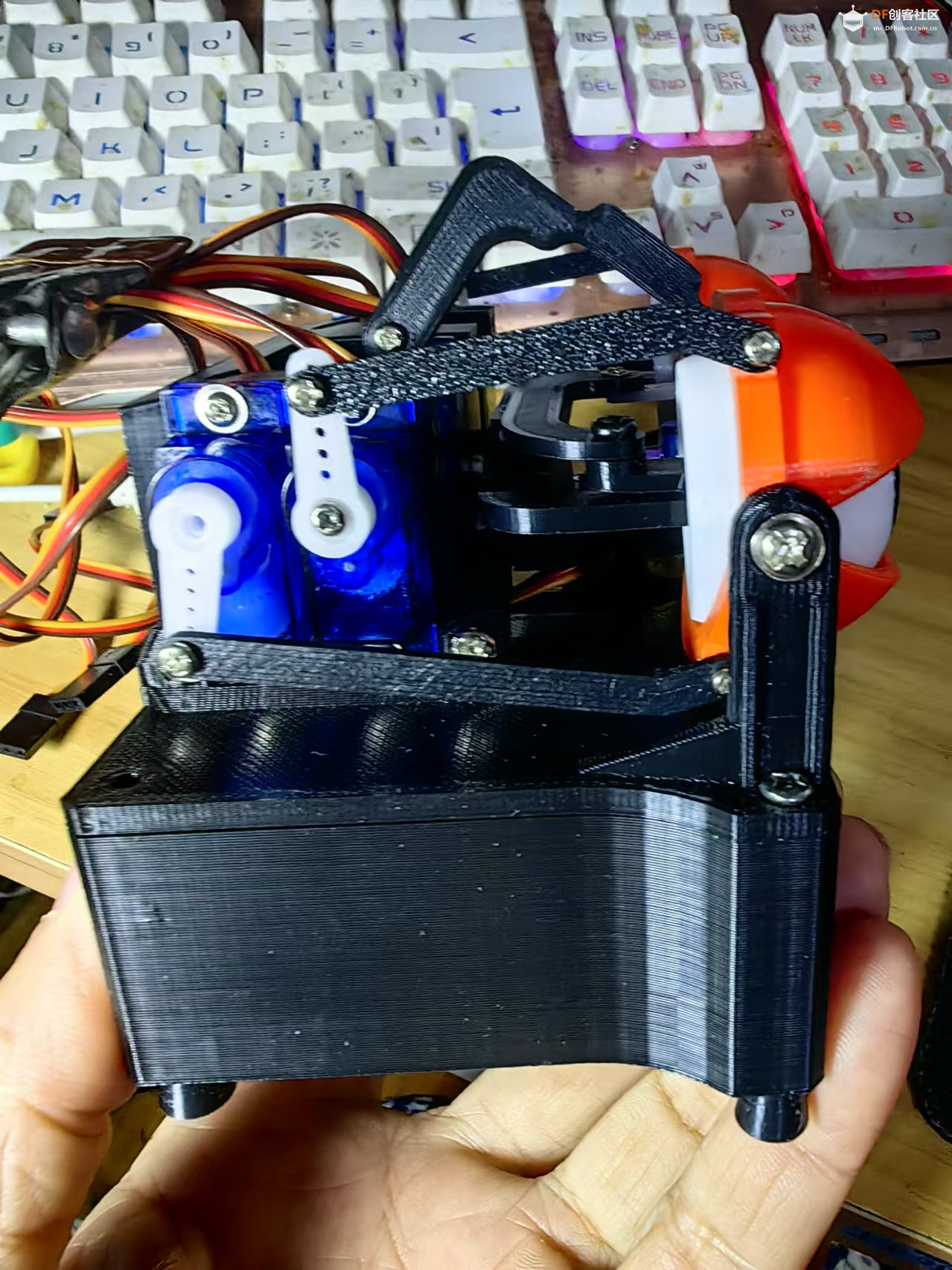
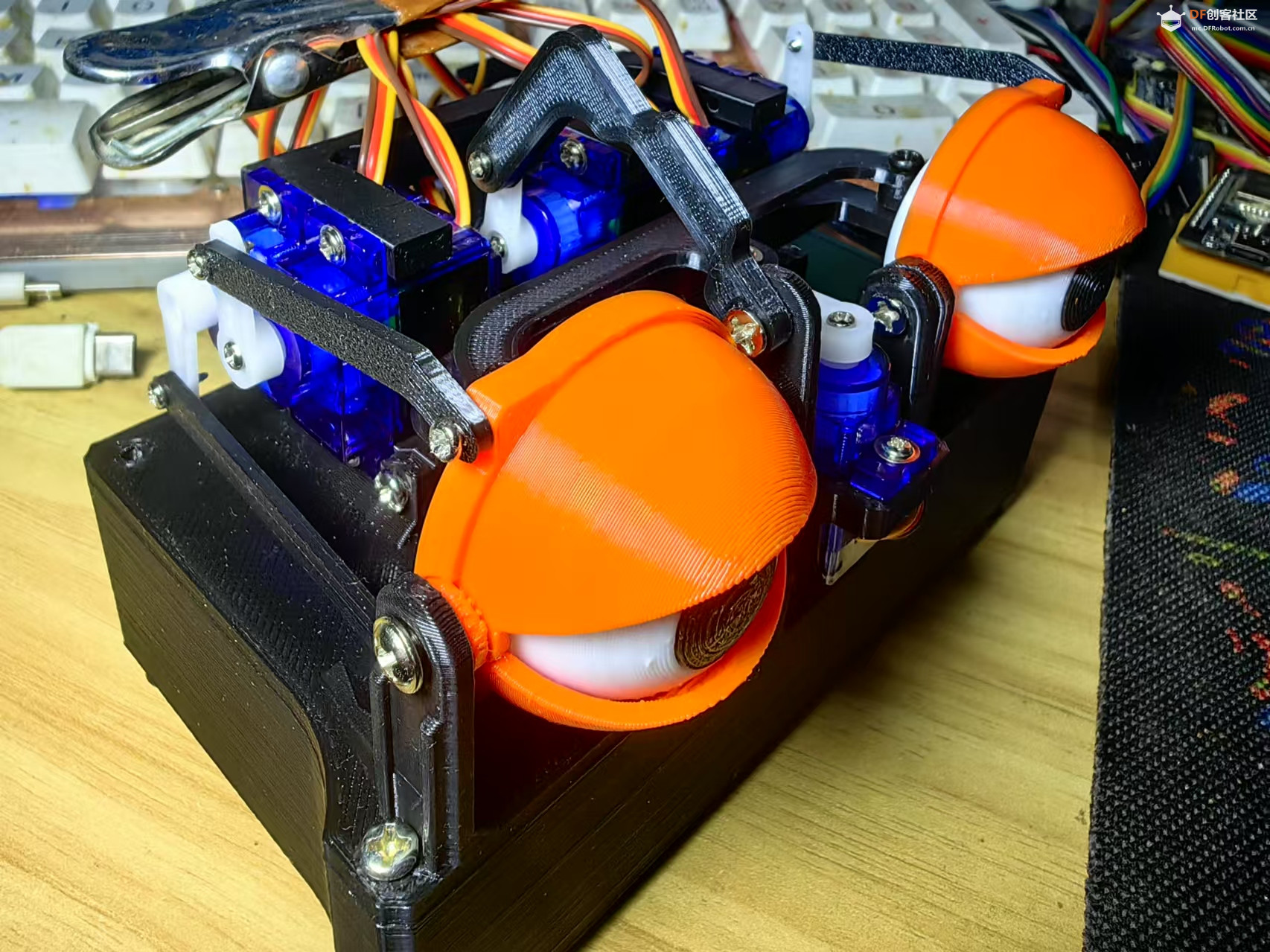
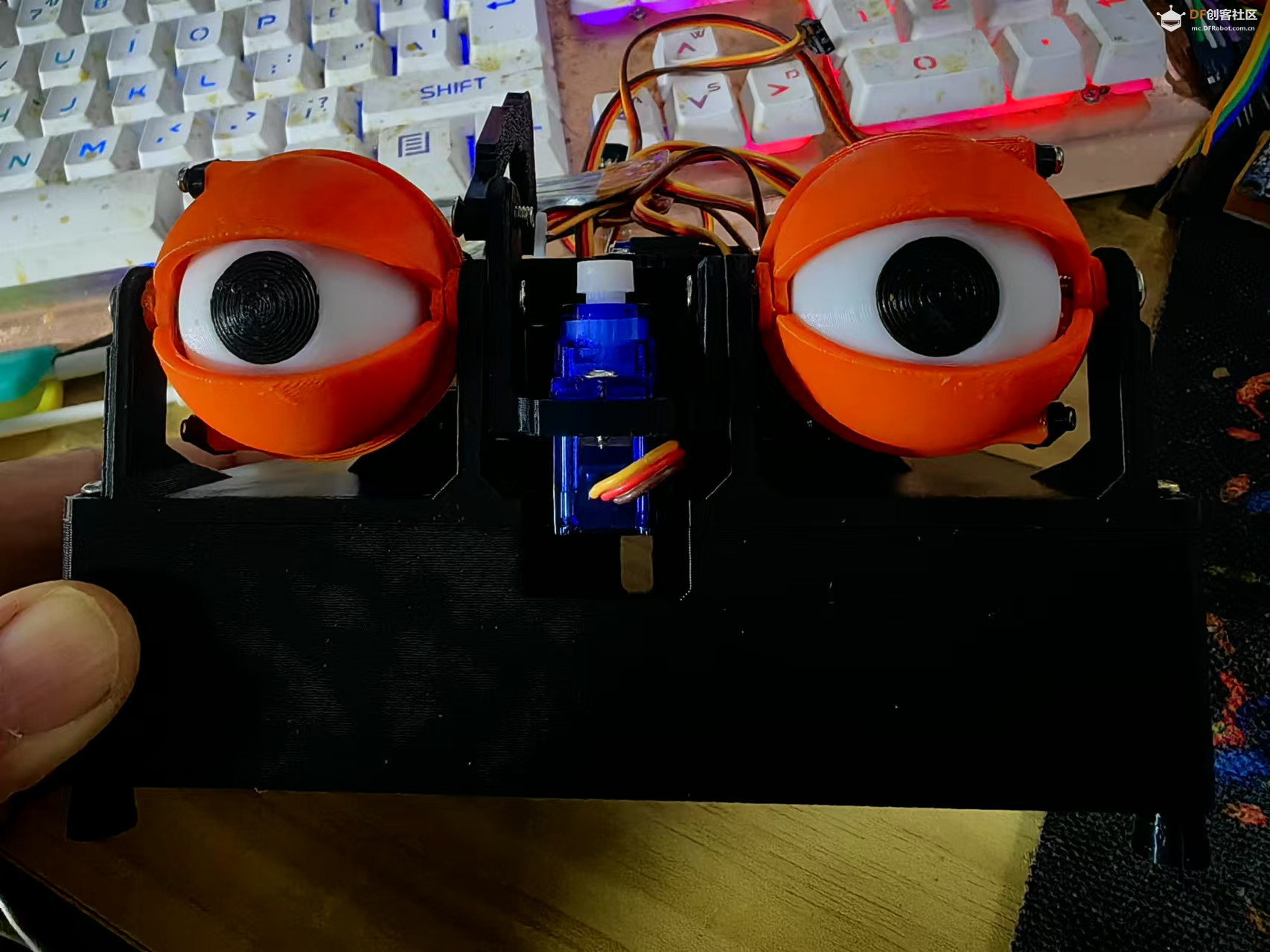
[项目] 【花雕学编程】Arduino动手做(242)---尝试仿生眼机器人 |

|
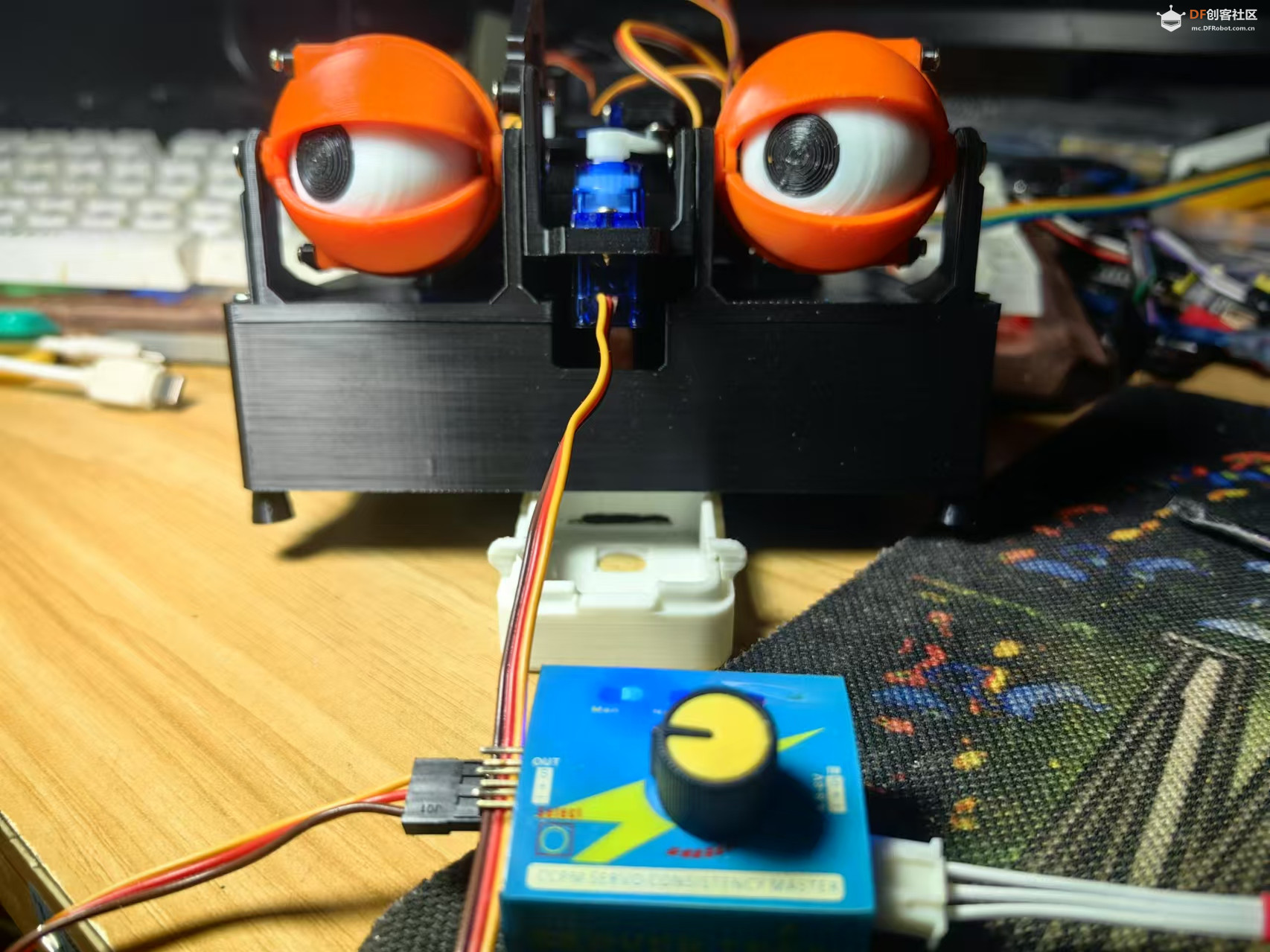
简易舵机测试仪 TITAN 测试仪 测试器 三档切换 带指示灯 产品规格: (1)输出:≤15mA (5.0) (2)输入:DC 4.8-6.0v (3)输出信号:1.5ms±0.5ms (4)尺寸:46*32*17MM (5)重量:8g (6)调节方式:手动,自动,中位. 特点:能够很方便的检测和设定伺服器的虚位,抖动和中位. 可连接两组舵机或电调;单片机控制,稳定性好、精度高。旋转旋钮,即可检测舵机。 如果连接电子调速器(有刷或无刷均可),即可摆脱遥控设备进行手动调速,用于测试调 速器或马达性能非常实用,不用再繁琐地连接遥控器和接收机了。它相当于一个“手 动接收机”的功能,通过旋钮模拟发射机打舵 使用说明: 参照下面图片,左边接舵机,分上中下3组,可接3个舵机;右边单排插针接电源,靠近边上为负极(可看标识符号),接电池负极,千万注意不可接反,若电源接反将烧掉IC;S标识符对应的针脚,不用理会。接通电源,蓝色灯会同时亮,然后只亮左边第一个,为手动调节电位器测试,按按键,中间灯亮,为归中测试;第三个灯亮,自动测试。测试电调的接法和接舵机一样,但是就输入端就不要再接电源了,测试马达需先接电调,跟测电调一样! 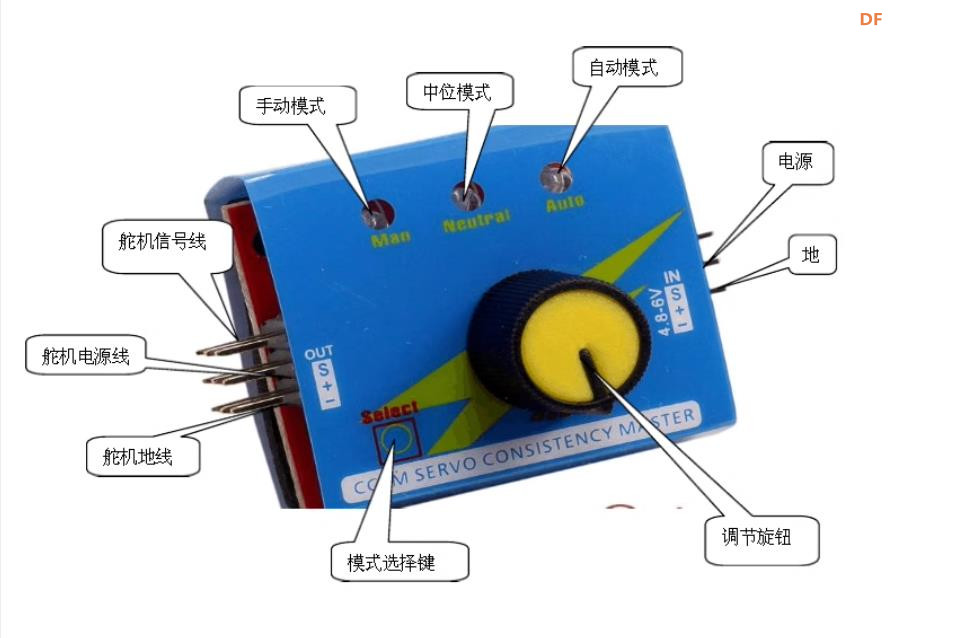 |
|
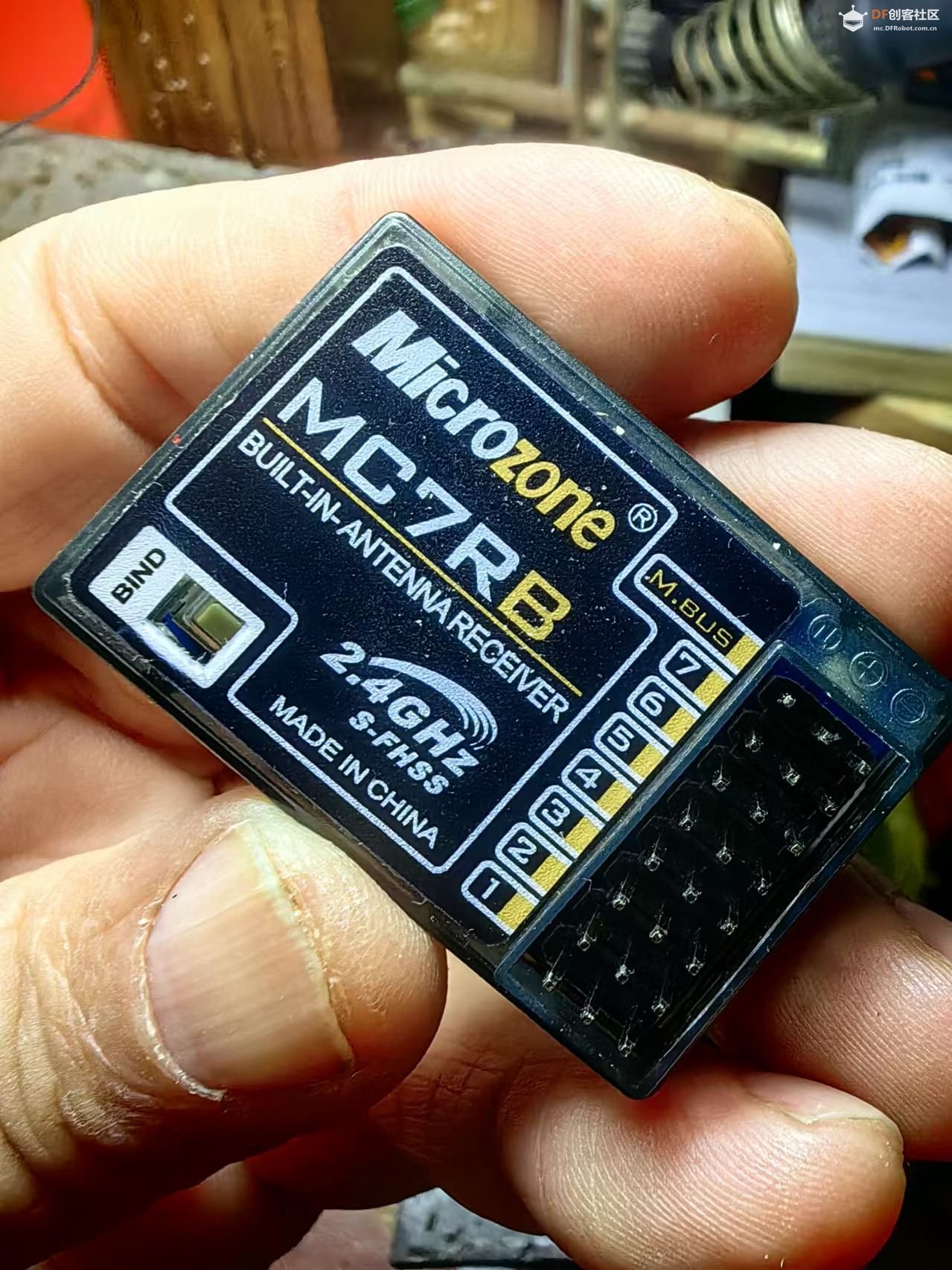
MC6C和MC7RB组合是一款功能强大且灵活的无线控制系统,特别适用于模型飞机和多旋翼飞行器。以下是它们的一些优点和特色: 优点 1、紧凑设计:MC6C无线发射器设计紧凑,手感舒适,操作方便。 2、2.4GHz频段:使用2.4GHz频段,确保通信的稳定性和可靠性。 3、6通道控制:MC6C支持6通道控制,适用于多种复杂的控制需求。 4、兼容性强:该系统兼容广泛的无线控制车辆和飞行器。 5、高性能:MC7RB接收器采用S-FHSS技术,提供高性能和灵敏的控制。 6、灵活的电源选择:MC6C发射器可以使用4节AA电池或2S 7.4V锂电池供电,提供更多的灵活性。 特色 1、混合功能:MC6C支持V-tail和Elevon配置的混合功能,可以根据不同飞行器的需求进行定制。 2、内置天线设计:MC7RB接收器内置天线设计,确保无线信号的稳定传输。 3、M.Bus(S.Bus)支持:MC7RB接收器支持M.Bus(S.Bus)技术,提供更灵活的控制和更简化的连接。 4、高精度控制:采用1024 PPM/PCM解码方式,提供高精度和准确的控制。 |
|
SG90和MG90S是两种常用的微型舵机,主要区别: 1、齿轮材料:SG90使用塑料齿轮,而MG90S使用金属齿轮,金属齿轮更耐用,适合承受更高负荷。 2、转矩:MG90S提供稍微更高的转矩,适合需要更大力量的项目。 3、耐用性:由于金属齿轮的使用,MG90S的耐用性更高,适合更多的应用场景。 总体来说,如果你需要更高的耐用性和转矩,MG90S是一个更好的选择。如果你的项目对这些因素没有特别的要求,SG90也是一个经济实惠的选择。 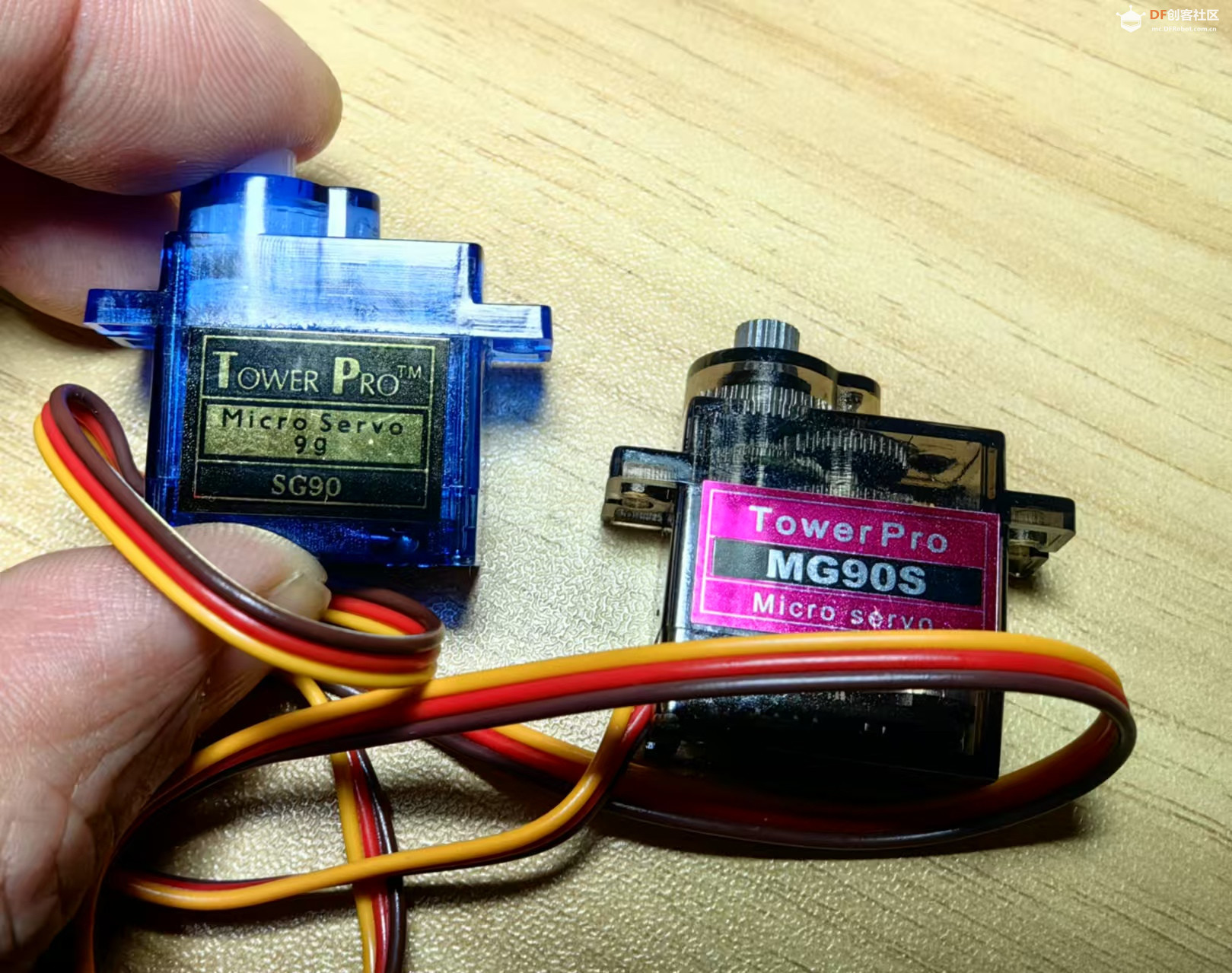 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶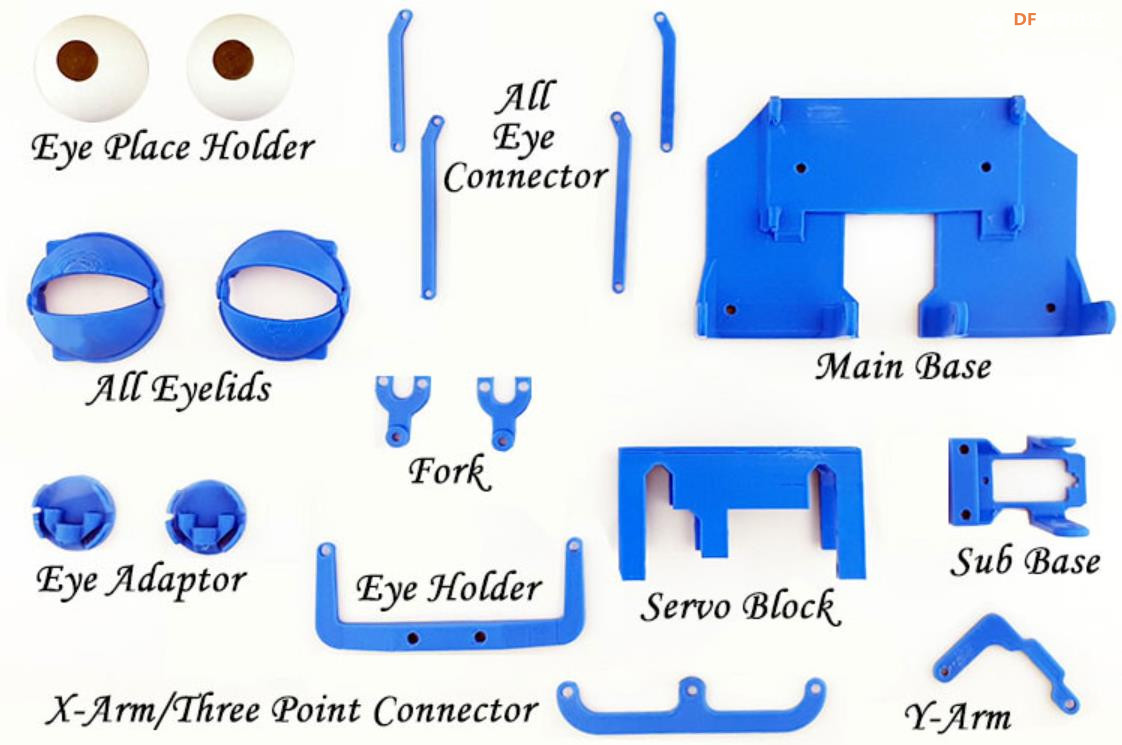






 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






