|
1073| 5
|
[项目] 【花雕】AI 迷你小龙虾 MimiClaw 自主闭环控制机器人 |
|
本帖最后由 驴友花雕 于 2026-3-30 07:33 编辑 从工程视角来看,基于Arduino、使用互补滤波进行姿态控制的BLDC(无刷直流电机)机器人,是一个典型的嵌入式实时闭环控制系统。它集成了传感器数据融合、控制算法和电机驱动,广泛应用于对姿态稳定性有要求的场景。关于 MimiClaw(迷你小龙虾) 结合 Arduino BLDC,这是一个将边缘AI智能体(AI Agent)与高性能电机控制深度融合的嵌入式机器人方案。从专业视角来看,这套方案的核心在于利用 ESP32-S3 的双核架构,将“思考”(AI决策)与“行动”(BLDC电机控制)在硬件层面进行物理隔离与协同,实现了低成本、低功耗的本地自主闭环控制。 一、主要特点:架构与核心能力 这套系统并非简单的“遥控+电机”,而是一个具备感知、思考和执行能力的智能体。 1、异构双核架构(大脑与小脑分离) Core 0(AI大脑): 运行 MimiClaw 智能框架,负责处理网络通信(WiFi/蓝牙)、连接大语言模型(LLM)、进行 ReAct 推理(思考-行动-观察)以及管理长期记忆(基于 Flash 的 Markdown 文件)。 Core 1(运动小脑): 专职负责实时性要求极高的任务,如 BLDC 电机的 FOC(磁场定向控制)算法运算、PWM 波形生成、传感器数据采集(编码器、IMU)。 优势: 这种物理隔离确保了即使 AI 正在进行复杂的逻辑推理或网络请求,也不会阻塞电机的控制循环,从而避免了电机抖动或失步。 2、本地化智能与持久记忆 本地闭环: 虽然复杂推理可能调用云端大模型,但 MimiClaw 支持本地工具调用(如 GPIO 控制、传感器读取)。系统通过 SPIFFS 文件系统在 Flash 中存储 MEMORY.md 和 SOUL.md,使得机器人拥有“长期记忆”。它能记住用户习惯、历史故障或环境特征,实现个性化的自主决策。 裸机运行: 不依赖 Linux 或庞大的操作系统,直接在裸机(No OS)环境下运行纯 C 代码,功耗极低(约 0.5W),启动速度快,系统稳定性高。 3、专业的 BLDC 驱动能力 FOC 控制: 支持磁场定向控制(FOC),相比传统的方波驱动,FOC 能提供更平滑的低速性能、更高的效率和更精准的力矩控制,非常适合需要精细操作的机器人关节。 多模式支持: 兼容有霍尔、无霍尔、编码器反馈等多种传感器配置,支持速度环、位置环和电流环的闭环控制。 二、应用场景:从交互到执行 MimiClaw + BLDC 的组合极大地拓展了嵌入式机器人的应用边界,使其从“执行预设代码”转变为“理解自然语言指令”。 1、自然语言控制的智能机械臂/小车 场景描述: 用户通过 Telegram 或语音发送指令:“去客厅巡逻一圈”或“把左边的杯子抓给我”。 工作流: MimiClaw 解析语义 → 规划路径或动作序列 → 调用底层电机控制工具 → ESP32 驱动 BLDC 电机执行。 价值: 降低了人机交互门槛,无需编写复杂代码即可指挥机器人完成复杂任务。 2、自主环境监控与巡检机器人 场景描述: 部署在工厂或家庭,结合温度、气体或视觉传感器。 工作流: 机器人自主巡航,MimiClaw 实时监控传感器数据。若发现异常(如温度超标),它不仅报警,还能自主决策(如“打开风扇”或“移动到通风处”),并将日志写入本地存储。 3、教育与科研平台(AIoT) 场景描述: 用于验证边缘计算、强化学习或多模态融合算法。 价值: 极低的硬件成本(ESP32-S3 开发板 + 电机)使得它成为学习“具身智能(Embodied AI)”的理想平台,学生可以直观地看到 AI 代码如何驱动物理实体。 三、需要注意的事项:工程实践指南 在实际开发中,为了确保系统的稳定性和安全性,必须注意以下关键点: 1、电源系统的“生死线”:隔离与共地 严禁共用 USB 供电: BLDC 电机启动瞬间电流极大,会拉低电压,导致 ESP32 重启或 AI 逻辑错乱。 正确做法: 电机驱动电源(12V/24V)与 ESP32 逻辑电源(5V/3.3V)必须物理隔离(独立电池或稳压模块),但必须共地(GND 相连),否则信号参考电平不一致会导致通信失败。 2、通信链路的可靠性 硬件串口: MimiClaw 与电机驱动板(或从控 MCU)通信时,务必使用 ESP32 的硬件串口(UART1/2),严禁使用软件模拟串口。软件串口在高负载下会产生延迟和丢包,导致控制指令丢失。 波特率: 建议使用 115200 或更高的波特率以保证实时性。 3、AI 与实时控制的边界 不要越界: AI(MimiClaw)适合做“高层规划”(如:去哪里、做什么),绝对不适合直接参与“底层实时控制”(如:生成 PWM 波形、PID 计算)。底层控制必须由 Core 1 或专用定时器中断以高优先级运行。 4、电机参数匹配 极对数: 在代码中初始化 BLDCMotor 时,必须准确填写电机的极对数(Pole Pairs)。如果参数错误,FOC 算法将无法正确解算角度,导致电机啸叫、抖动或无力。 5、安全保护机制 软启动: 代码中必须包含缓启动逻辑,避免瞬间大电流冲击。 看门狗与限幅: 设置电流上限和堵转保护,防止机械卡死烧毁电机或驱动板。 总结来说,MimiClaw + Arduino BLDC 是一套极具前瞻性的方案,它将大模型的“智商”赋予了低成本硬件的“体能”,是迈向普及型具身智能的重要一步。  |
|
基于 MimiClaw 框架与 Arduino ESP32 结合 SimpleFOC 库的架构,这里为你提供三个不同层级的实际参考运用代码案例。 这些案例展示了如何利用 ESP32 的双核特性: Core 0:运行 MimiClaw 智能体(处理指令、状态机、通信)。 Core 1:运行 SimpleFOC 实时控制循环(FOC 算法、PID 计算)。 前置依赖: Arduino IDE 安装 SimpleFOC 库。 硬件:ESP32-S3 开发板 + BLDC 电机 + 驱动板(如 L6234/TS6500)+ 编码器(如 AS5600)。 案例一:基础闭环速度控制(“小脑”构建) 功能描述: 这是最底层的“反射弧”。利用 SimpleFOC 在 Core 1 上建立稳定的速度闭环,确保电机能精准响应速度指令,不受负载变化影响。 |
|
案例二:MimiClaw 智能体集成(“大脑”接入) 功能描述: 引入 MimiClaw 的核心逻辑,通过串口或蓝牙接收自然语言指令(如“加速”、“停止”),解析后转化为具体的电机控制参数。 |
|
案例三:带传感器反馈的自主安全闭环(“本能”保护) 功能描述: 在 MimiClaw 发出指令的同时,系统实时监控电机电流(通过相电流检测或估算)和温度。如果检测到堵转或过热,底层代码会强制介入(切断输出),并向 MimiClaw 发送警报,实现“安全优先”的闭环。 |
|
要点解读 1、双核分工是核心(Core 0 vs Core 1): MimiClaw 框架(AI 逻辑、网络通信)通常运行在 Core 0 上,而 SimpleFOC 的实时控制循环(loopFOC 和 move)必须运行在 Core 1 上。这种物理隔离确保了即使 AI 正在处理复杂的自然语言推理或网络延迟,电机的控制频率(通常 1kHz)也不会受到干扰,防止电机抖动或失控。 2、通信机制的选择(共享变量 vs 队列): 在上述代码中,使用了 volatile 全局变量(如 target_velocity)在两个核心间传递数据。对于简单的标量数据(浮点数、布尔值),这是最高效的方式。对于复杂的指令包,建议使用 FreeRTOS 的 Queue(队列) 机制,以避免读写冲突。 3、传感器反馈的双重作用: 传感器(如 AS5600 编码器)的数据不仅用于 FOC 算法计算电角度(磁场定向),还用于上层的“自主闭环”。例如,通过监测 motor.current_q(Q轴电流,正比于力矩),系统可以判断机器人是否遇到障碍物(堵转),从而实现智能避障或力控交互。 4、MimiClaw 的“工具调用”能力: 在案例二中,parseMimiClawCommand 函数模拟了 MimiClaw 的“工具执行”阶段。在实际部署中,MimiClaw 会将自然语言(如“去厨房”)转化为具体的 JSON 指令,ESP32 解析后只需修改 target_velocity 或 target_position 变量,即可实现“语言即控制”。 5、安全第一的底层逻辑: 案例三展示了“底层安全优先”原则。无论 MimiClaw(大脑)发出多么激进的指令,底层的 Arduino 代码(小脑/脑干)必须保留最终的否决权。通过监控电流、温度或编码器异常,底层代码可以强制切断 PWM 输出,保护硬件不受损坏。 请注意:以上案例仅作为思路拓展的参考示例,不保证完全正确、适配所有场景或可直接编译运行。由于硬件平台、实际使用场景、Arduino 版本的差异,均可能影响代码的适配性与使用方法的选择。在实际编程开发时,请务必根据自身硬件配置、使用场景及具体功能需求进行针对性调整,并通过多次实测验证效果;同时需确保硬件接线正确,充分了解所用传感器、执行器等设备的技术规范与核心特性。对于涉及硬件操作的代码,使用前务必核对引脚定义、电平参数等关键信息的准确性与安全性,避免因参数错误导致硬件损坏或运行异常。  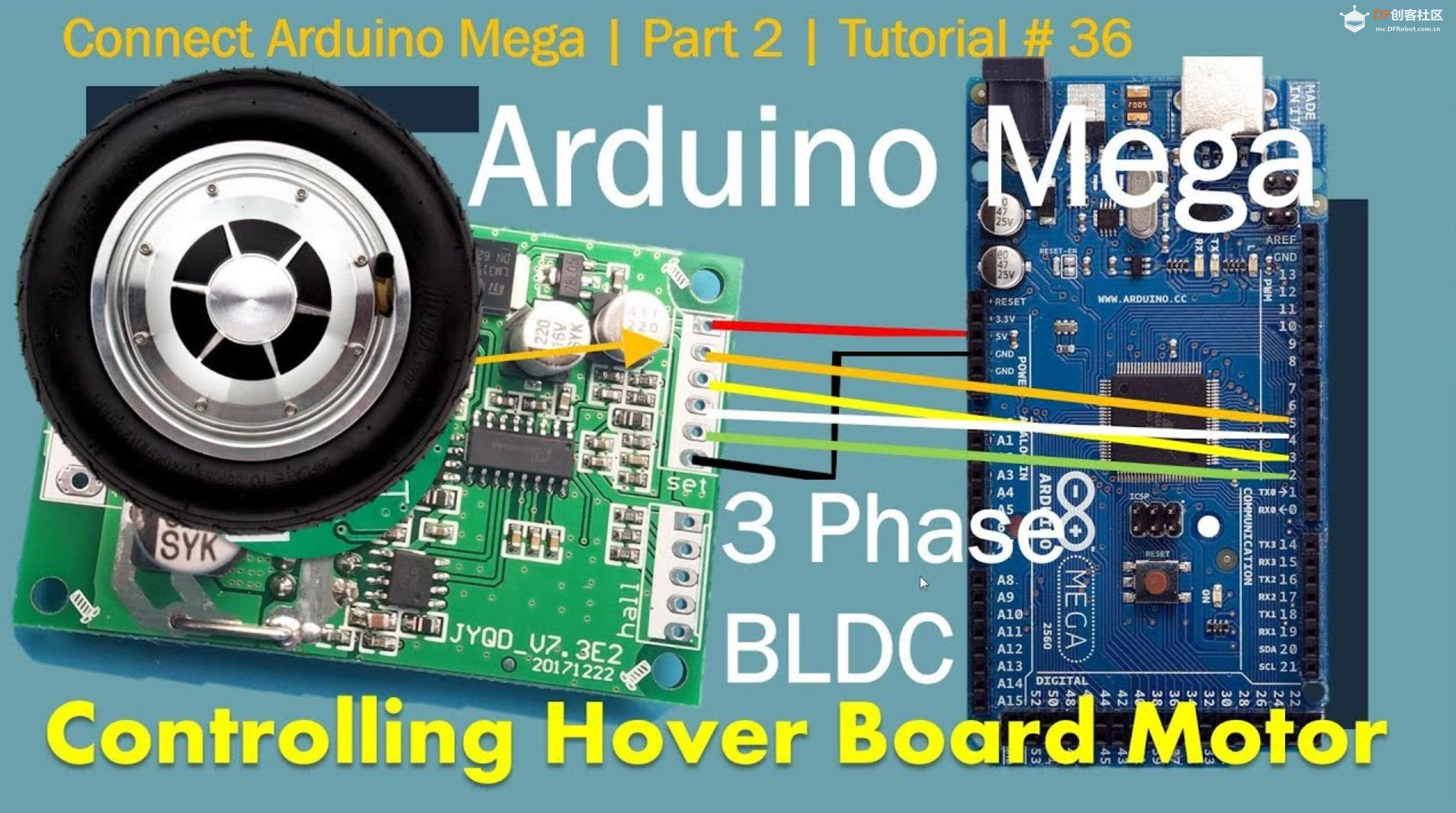 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






