|
1003| 8
|
[项目] 【花雕】极简硬件 ESP32‑S3 撬动机器人AI Agent 的全面落地 |
|
原标题 【花雕学编程】从代码到运动:MimiClaw 如何用 ESP32‑S3 微控制器撬动机器人 AI Agent 的全面落地 从代码到运动:MimiClaw 如何用 ESP32‑S3 微控制器撬动机器人 AI Agent 的全面落地 当“大模型”遇见“小车轮”:深度剖析 MimiClaw 在嵌入式机器人领域的架构哲学与实践启示。 ## 引言:机器人需要怎样的“大脑”? 传统机器人系统,似乎早已固化了“上位机 + 下位机”的分布式架构范式:一台运行 Linux 系统的高性能单板计算机(如树莓派、Jetson),承担着视觉处理、SLAM 建模、路径规划与 AI 交互的“脑力工作”;另一块单片机(STM32、Arduino 等),则专职负责电机控制、传感器采集等实时性要求极高的“体力活”。 这种架构固然能实现复杂功能,但也不可避免地带来了三大痛点:硬件成本居高不下、系统功耗难以控制、多设备协同的复杂度大幅提升,让机器人技术难以走进低成本场景。 而 ESP32‑S3 这类高性能微控制器的出现,彻底打破了这一困局。这款集成双核 Xtensa LX7 @ 240MHz 处理器、向量扩展指令、WiFi/蓝牙双模通信,以及最高 16MB Octal PSRAM 的芯片,让“单芯片机器人”的构想从理论走向现实。MimiClaw 正是这一趋势下的标志性实践——它在一颗成本不足 5 美元的微控制器上,完整实现了“感知(多通道交互)→ 决策(LLM 推理 + 上下文记忆)→ 执行(电机/灯光控制)”的智能体闭环,用极简硬件撬动了机器人 AI Agent 的全面落地。 本文将跳出单纯的代码解读,从机器人学经典范式(感知-规划-行动)的视角,重新审视 MimiClaw 的架构设计,探讨其在教育机器人、桌面级服务机器人、低成本科研平台等领域的应用潜力与工程启示,为嵌入式 AI 机器人的开发提供可借鉴的思路。  |
|
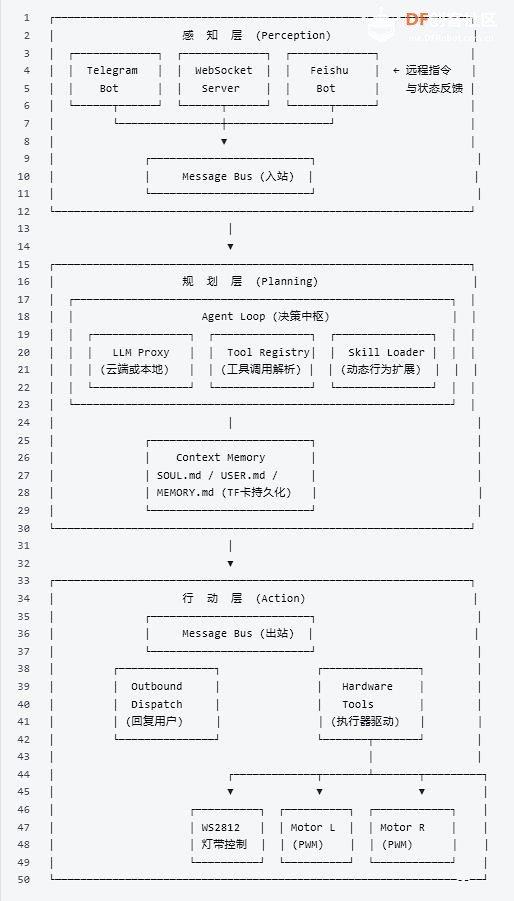
从机器人学视角出发,我们可以清晰看到 MimiClaw 架构的三大亮点: 2.1 感知层:多模态指令输入,构建高效人机交互通道 机器人的感知不仅限于物理传感器(摄像头、IMU、雷达等),更需要与人类交互的“社会传感器”——即人机交互界面(HRI)。MimiClaw 搭建的 Telegram / WebSocket / Feishu 多通道交互体系,本质上是一种低门槛、高灵活的远程 HRI,其核心价值体现在三点: - 低门槛操控:用户无需专用遥控器,通过手机 App 即可下达自然语言指令,极大降低了机器人的使用门槛,适配非专业用户场景。 - 闭环反馈机制:机器人的执行结果(如“已前进1米”“电量不足”)可通过同一通道实时返回,形成“指令-执行-反馈”的对话式控制闭环,提升用户体验。 - 可扩展性强:消息总线天然支持多会话并发,可轻松扩展为多机器人编队协同的指挥中心,为复杂场景应用奠定基础。 2.2 规划层:LLM 替代传统规划逻辑,实现灵活决策 传统机器人的规划的,依赖工程师手工编码实现状态机(State Machine)或行为树(Behavior Tree),灵活性极差,难以适配非结构化场景。MimiClaw 最具创新性的设计,就是用 LLM 替代了部分传统规划逻辑,让机器人拥有了“灵活思考”的能力: - 自然语言解析:将人类自然语言指令(如“去客厅转一圈然后回来”)自动映射为工具调用序列(motor_control + delay),无需人工编写固定指令。 - 动态纠错能力:当电机执行失败(如遇到障碍物无法前进)时,LLM 可自动生成重试策略(如“后退5厘米后左转”),或告知用户失败原因,无需人工干预。 - 上下文连续性:通过 TF 卡持久化的 Context Memory(SOUL.md / USER.md / MEMORY.md),机器人可记住之前的任务背景(如“你刚才说要去哪?”),实现连贯的交互体验。 尽管这种 LLM-based 规划在确定性上略逊于传统行为树,但在家庭服务、教育等非结构化交互场景中,其灵活性具有压倒性优势,让机器人从“被动执行指令”升级为“主动理解需求”。 2.3 行动层:硬件抽象与实时控制分离,兼顾安全与稳定 MimiClaw 将电机控制、灯效驱动等底层硬件操作,统一封装为“硬件工具”,由上层规划层通过消息总线调用。这种设计带来了两个关键好处,完美解决了嵌入式机器人的核心痛点: - 安全隔离:工具内部可预设边界检查逻辑(如限制电机最大转速、运行时间),防止 LLM 生成有害指令(如“无限高速前进”),保障机器人与环境的安全。 - 实时性保障:电机 PWM 控制、WS2812 灯效驱动等实时任务,由 FreeRTOS 硬件定时器直接驱动,不受 LLM 推理延迟(可能达数秒)的影响,确保运动控制的平稳性。 |
|
## 三、面向机器人领域的深度应用场景 MimiClaw 的架构设计并非局限于单一原型,其“单芯片 + AI Agent”的模式具有极强的可扩展性,可被广泛推广至以下机器人领域,落地低成本、高性价比的智能解决方案: 3.1 低成本 STEM 教育机器人套件 现有教育机器人市场存在明显痛点:LEGO SPIKE、micro:bit 小车等产品,编程依赖图形化积木,缺乏“智能感”,难以激发学生对 AI 的兴趣;而树莓派套件又过于复杂、价格昂贵,超出中小学生的承受范围。 MimiClaw 方案恰好解决了这一矛盾: - 硬件配置:ESP32‑S3 核心板 + 两轮差速底盘 + 18650 电池 + 简易 3D 打印外壳,总成本可控制在 15 美元左右,性价比极高。 - 软件体验:学生通过 Telegram 给机器人发送自然语言指令(如“向前走 1 米,左转 90 度”),LLM 自动将指令转为电机控制序列,直观感受 AI 与物理世界的交互。 - 教学价值:教师可通过自定义 SOUL.md 文件限制机器人行为(如“禁止高速行驶”),保障教学安全;学生可进阶修改 tool_motor.c 等源码,学习嵌入式驱动开发,实现“从使用到创作”的进阶。 3.2 桌面级语音服务机器人 当前智能设备市场存在明显断层:Amazon Echo、Google Nest 等智能音箱缺乏运动能力,只能被动响应指令;而 Vector 等带屏幕的桌面机器人,价格昂贵且生态封闭,难以二次开发。 基于 MimiClaw 架构,可快速搭建桌面级语音服务机器人: - 硬件配置:采用集成麦克风与扬声器的 ESP32‑S3 开发板(如 ESP32‑S3‑Box),配合两自由度云台 + 摄像头(可选),实现语音交互与视觉感知。 - 软件扩展:在现有架构上增加本地唤醒词检测与 TTS 语音合成模块,实现全离线语音交互;通过 WebSocket 与手机 App 联动,实现远程视频巡视(云台控制)。 - 功能升级:利用 Context Memory 的记忆功能,在 USER.md 中记录家庭成员的日程偏好(如“小主人每天下午4点放学”),实现主动提醒(如“小主人,该吃药了”),提升服务体验。 |
|
3.3 轻量级 SLAM 探索平台 SLAM(即时定位与地图构建)是机器人自主导航的核心技术,但传统 SLAM 算法通常需要至少 1 颗 ARM Cortex‑A 级别处理器,ESP32‑S3 这类 MCU 能否承担 SLAM 相关任务?MimiClaw 给出了一种“瘦客户端 + 边缘计算”的可行思路: - 视觉简化:放弃传统视觉 SLAM 的复杂计算,改用 ToF 测距传感器阵列(如 VL53L5CX 8x8 区域传感器)或 360° 激光雷达(通过 UART 连接),采集环境距离数据,构建简单的 2D 占据栅格地图。 - 云端/边缘协同:ESP32‑S3 仅负责采集传感器数据,通过 WiFi 上传至边缘服务器(一台本地 PC),由服务器运行轻量级 SLAM 算法(如 Cartographer 轻量版)完成路径规划;规划结果通过 WebSocket 下发给 ESP32‑S3,转为电机控制指令。 - 架构适配:在 MimiClaw 的 tool_registry 中增加 slam_navigate 工具,Agent Loop 收到“去厨房”等指令后,自动调用该工具,完成“路径请求-指令执行-状态反馈”的闭环。 3.4 多机器人协同与数字孪生 MimiClaw 的消息总线设计,天然支持多设备互联。只需将内存总线替换为 MQTT 协议,即可构建一个小型多机器人协同系统,适配简单的工业场景或科研需求: 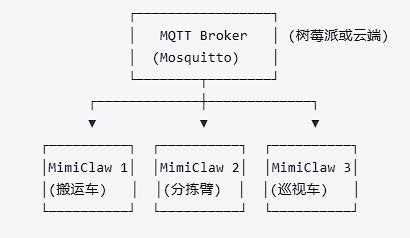 该系统的核心优势的在于: - 统一指挥:用户在 Telegram 群组中 @ 不同机器人下发任务(如“@MimiClaw1 把物料运到仓库”),实现集中管理。 - 状态同步:各机器人通过 MQTT 协议发布自身位置、电量、任务进度等状态,同时订阅其他机器人的状态,实现简单的协同操作(如“搬运车到达后,分拣臂开始工作”)。 |
|
## 四、工程实践中的挑战与 MimiClaw 的应对之道 将 MimiClaw 的思路付诸实际机器人开发时,不可避免地会面临嵌入式系统特有的技术挑战——而 MimiClaw 的源码,恰恰给出了精巧、可落地的解决方案,体现了深厚的工程实践智慧: 4.1 挑战一:电机控制实时性 vs. WiFi 协议栈延迟 核心问题:ESP32 的 WiFi 协议栈运行在单独的任务中,其优先级较高,可能抢占 CPU 资源,导致电机 PWM 输出抖动,表现为机器人运动顿挫、不稳定。 MimiClaw 对策: - 双核隔离:利用 ESP32‑S3 的双核优势,将网络相关任务(WiFi 通信、LLM 交互)绑定到 Core 0,电机控制、传感器采集等实时任务绑定到 Core 1,实现任务隔离,避免相互干扰。 - DMA 辅助驱动:WS2812 灯带驱动采用 RMT 外设的 DMA 模式,无需 CPU 持续干预,释放算力用于实时控制,进一步提升稳定性。 4.2 挑战二:LLM 推理延迟导致的运动失控 核心问题:若采用云端 LLM API,响应时间可能达到 3~10 秒;若机器人在这段时间内持续执行前一条指令,极易发生碰撞、出轨等失控问题。 MimiClaw 对策: - 异步工具执行:motor_control 等工具调用时,强制附带 duration_ms 参数(如“前进2000ms”),由硬件定时器自动停止电机,无需等待 LLM 后续指令,避免失控。 - 紧急停止机制:注册一个高优先级的 emergency_stop 工具,可由独立的看门狗任务或物理按键触发,强制停止所有电机与执行器,最大限度降低风险。 4.3 挑战三:内存碎片导致长期运行崩溃 核心问题:机器人长期运行中,频繁的消息分配与释放会导致 PSRAM 碎片化,最终出现 malloc 失败,引发系统崩溃,影响可靠性。 MimiClaw 对策: - 固定消息池:消息总线内部采用预分配的环形缓冲区,提前分配固定大小的内存用于消息存储,避免动态分配导致的碎片。 - 定期重启优化:结合 heartbeat 模块,在凌晨无人使用的时段自动重启设备,释放所有内存资源——ESP32 重启时间不足 1 秒,对用户体验几乎无影响,却能有效避免长期运行的稳定性问题。 |
|
## 五、未来演进:从 MimiClaw 到“机器人中间件标准” MimiClaw 的价值,不仅在于实现了一个单芯片机器人原型,更在于其架构思想具有极强的可抽象性——若进一步提炼优化,有望演化为一种面向资源受限机器人的轻量级中间件规范,类似机器人领域的 ROS(Robot Operating System),但针对 MCU 场景进行深度裁剪,适配低成本、低功耗需求。  如果 MimiClaw 社区能推动这一标准化进程,将极大降低嵌入式 AI 机器人的开发门槛——开发者只需专注于“硬件工具”的实现(如特定电机、传感器的驱动),而智能体框架、通信协议、任务调度等核心能力,均由 MimiClaw 中间件提供,真正实现“模块化开发、快速落地”。 |
|
## 结语:小芯片,大智慧 MimiClaw 的价值,不在于它实现了多么惊天动地的算法,而在于它用最朴素的 C 代码和成熟的 ESP‑IDF 组件,完成了一次“AI Agent 向边缘端下沉”的优雅示范——它证明了,无需高性能、高成本的硬件,只要架构设计合理、软硬深度融合,就能在一颗低成本 MCU 上,实现机器人 AI 智能体的完整闭环。 对于机器人领域的从业者、开发者而言,MimiClaw 至少带来了三点深刻启示: 1. 架构先行:在资源受限的 MCU 上,分层解耦、模块抽象,比单纯追求算法复杂度更重要——好的架构,能让有限的硬件资源发挥最大价值。 2. 软硬融合:将电机、传感器等硬件抽象为“工具”,让 LLM 与物理世界安全握手,既保证了灵活性,又兼顾了实时性与安全性,这是嵌入式 AI 机器人的核心设计思路。 3. 拥抱开源:MimiClaw 的所有设计思想,都凝练在简洁的源码之中,每一行代码都是工程哲学的注脚——开源不仅是技术共享,更是经验传承,能让更多开发者站在巨人的肩膀上,推动嵌入式机器人技术的普及。 或许在不远的将来,我们会在扫地机器人、智能玩具、教学套件,甚至是火星车的辅助控制器中,看到 MimiClaw 架构的影子。因为真正的创新,往往始于一颗敢于“做减法”的心——用极简的硬件,承载极致的智慧,让机器人走进更多场景,服务更多人。 致每一位在有限资源中,追求无限可能的嵌入式 AI 探索者。 附录 MimiClaw官网与代码仓库 官方网站:https://mimiclaw.io 代码仓库:https://github.com/memovai/mimiclaw 国内镜像:https://gitcode.com/RealGao/mimiclaw  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






