|
54| 4
|
[试用测评] 【花雕动手做】AI 视觉传感器二哈识图2之识别颜色数据 |
|
一、相关知识点 1、HUSKYLENS 2(二哈识图2)是DFRobot推出的新一代AI视觉传感器,搭载6TOPS算力的Kendryte K230双核RISC-V芯片,集成1GB LPDDR4内存与8GB存储,支持人脸识别、物体检测、姿态估计等20余种预置AI模型,同时允许用户通过自训练模型部署实现定制化识别 。其硬件配置包括200万像素摄像头、2.4英寸触摸屏、可更换镜头模组(支持显微/夜视)及RGB补光灯,搭配UART/I2C接口可无缝连接Arduino、树莓派等开发板,实现实时图传与多模态交互。内置MCP服务打通本地视觉与大模型能力,例如识别午餐图片后可生成膳食建议,而模型广场提供车牌识别、跌倒检测等垂直领域即用型方案。作为教育利器,它已融入《中小学人工智能通识教育指南》课程体系,通过Mind+图形化编程工具降低AI开发门槛,助力创客教育与STEAM实践。  2、行空板 K10 是一款专为中小学信息科技教学和创客项目设计的国产 AIoT 开发板,以 ESP32-S3 为核心,高度集成 2.8 英寸全彩 LCD 屏、摄像头、双麦扬声器、WiFi 蓝牙模块及温湿度、光线、加速度等多种传感器,无需额外配件即可实现离线语音识别(支持 200 词库)、人脸识别、二维码读取、物联网联动等功能,支持 Mind + 图形化编程与 MicroPython 代码编程,兼顾入门便捷性与功能扩展性,丰富的扩展接口还能连接外部传感器、执行器,轻松落地 AI、物联网类创意项目,是编程学习与科创实践的高性价比选择。  3、Mind + 是 DFRobot 旗下蘑菇云科创教育团队研发的、拥有自主知识产权的国产青少年编程软件,它兼容 Scratch3.0,既支持零基础学习者拖拽图形化积木编程,也能切换至 Python/C/C++ 代码编程,且积木可自动转换为对应代码助力进阶学习,同时适配行空板M10\ K10、Arduino、micro:bit 等众多主流开源硬件与上百种电子模块,集成图像识别、语音识别等 AI 功能及物联网开发能力,还搭配实时交互、程序烧录脱机运行等模式与丰富教学案例,适配校内外编程教学、创客项目及竞赛等场景,是兼顾低入门门槛与高拓展性的科创教育工具。 二、硬件连接 准备材料 行空板K10 x 1 HUSKYLENS 2 x 1 USB数据线 x 2 4pin连接线(或杜邦线)x 1 准备一根USB数据线和一根4Pin白色硅胶线。使用USB数据线连接电脑与行空板K10,使用4Pin黑胶先连接行空板K10与HuskyLens 2,再使用额外的USB数据线n连接示意图如下连接HUSKYLENS 2的Type-C接口与电源,为HUSKYLENS 2进行额外供电。接线图可参考下图。    |
|
三、颜色识别(Color Recognition)是一种计算机视觉与感知技术,其核心目标是:通过摄像头、图像传感器或算法,自动检测并判断物体或图像中的颜色信息。颜色识别是视觉智能的重要基础能力,它让设备具备“看懂颜色”的能力,是智能识别、自动控制、人机交互等系统中的基础功能之一。 (1)颜色识别的基本定义 颜色识别是指: 将图像中的像素值转换为颜色模型中的数值(如 RGB、HSV、Lab),并根据设定规则或模型判断颜色类别或属性。 它不仅识别“是什么颜色”,还可以分析颜色的分布、比例、变化趋势等。 (2)常见颜色模型 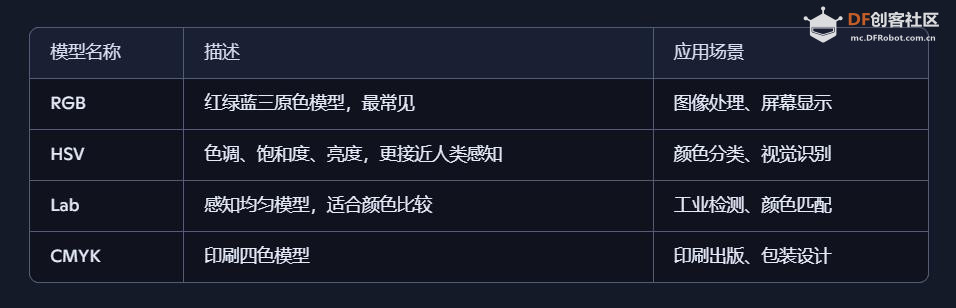 (3)颜色识别的技术流程 图像采集:通过摄像头或图像文件获取视觉数据。 颜色空间转换:将图像从 RGB 转换为 HSV 或 Lab 等更适合识别的模型。 区域提取:识别目标区域或物体轮廓。 颜色分析:统计像素值并判断颜色类别或比例。 结果输出:返回识别结果,如“红色球”、“绿色标签”、“蓝色背景”等。 (4)应用场景举例 教育实验:识别颜色球、颜色卡片进行互动教学 手机相机美颜或滤镜识别肤色与背景色 工业检测:识别产品颜色是否合格 智能交通:识别红绿灯颜色进行自动驾驶控制 零售系统:识别商品包装颜色进行分类 机器人视觉:识别颜色目标进行抓取或导航 (5)技术优势与挑战 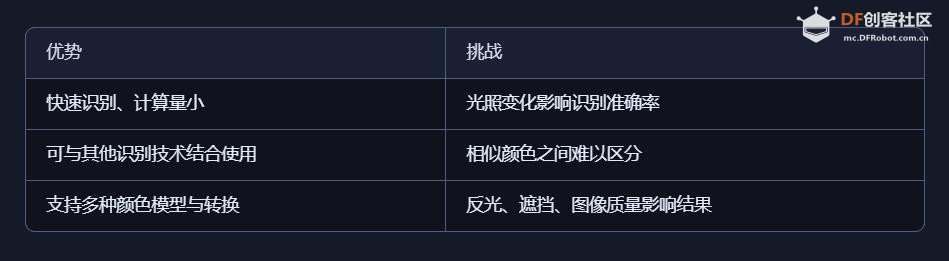 (6)颜色识别场景  |
|
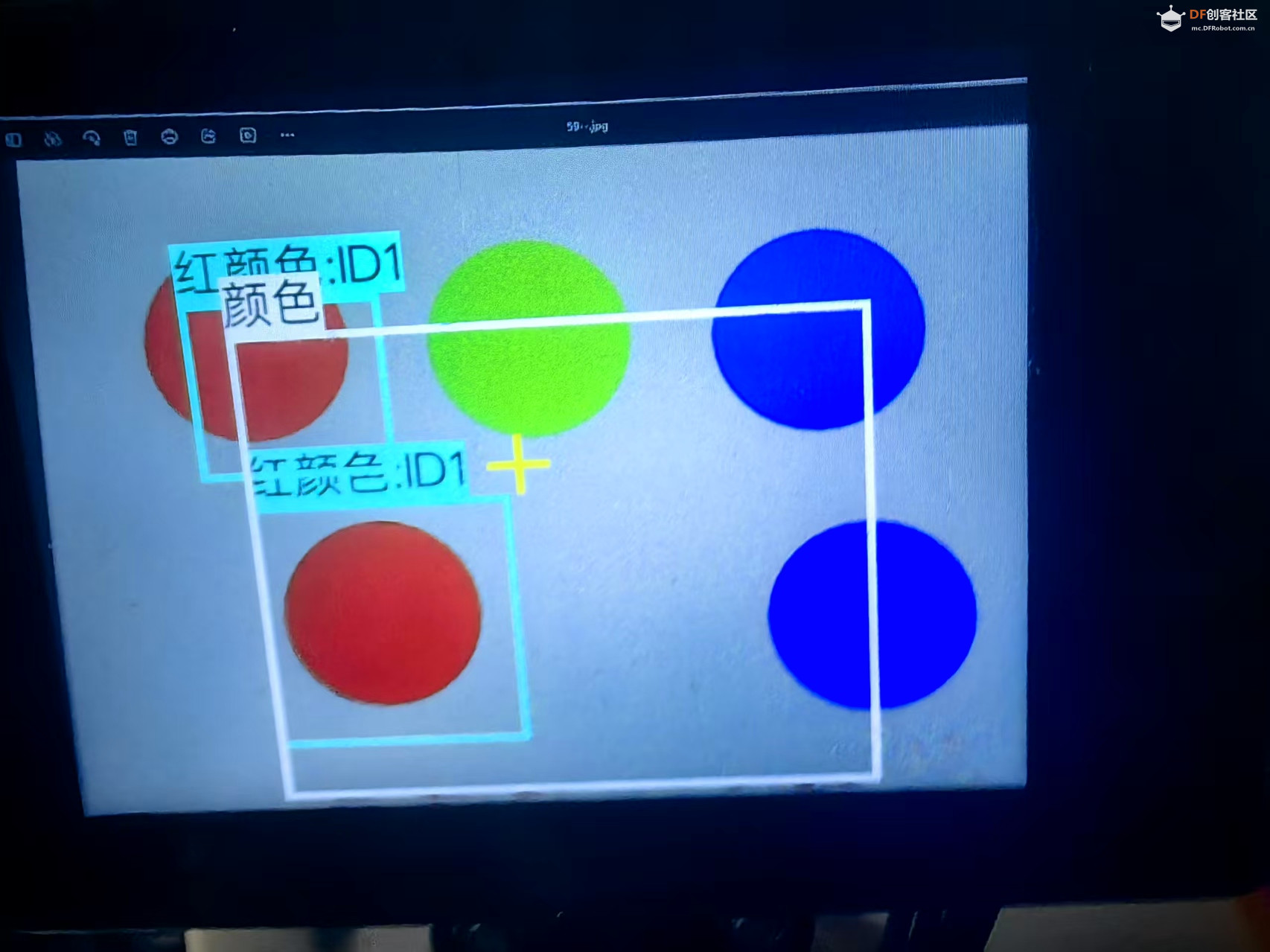
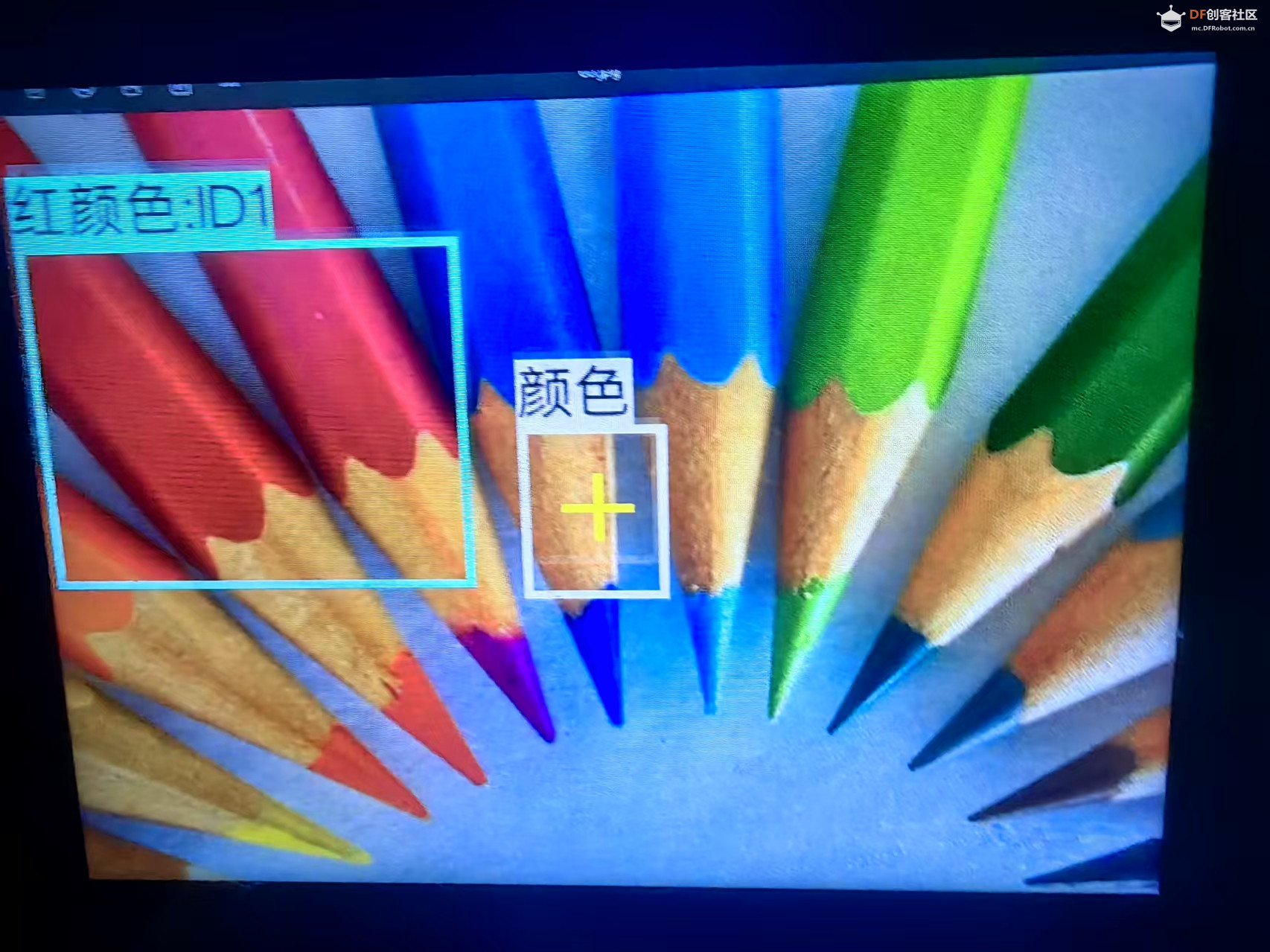
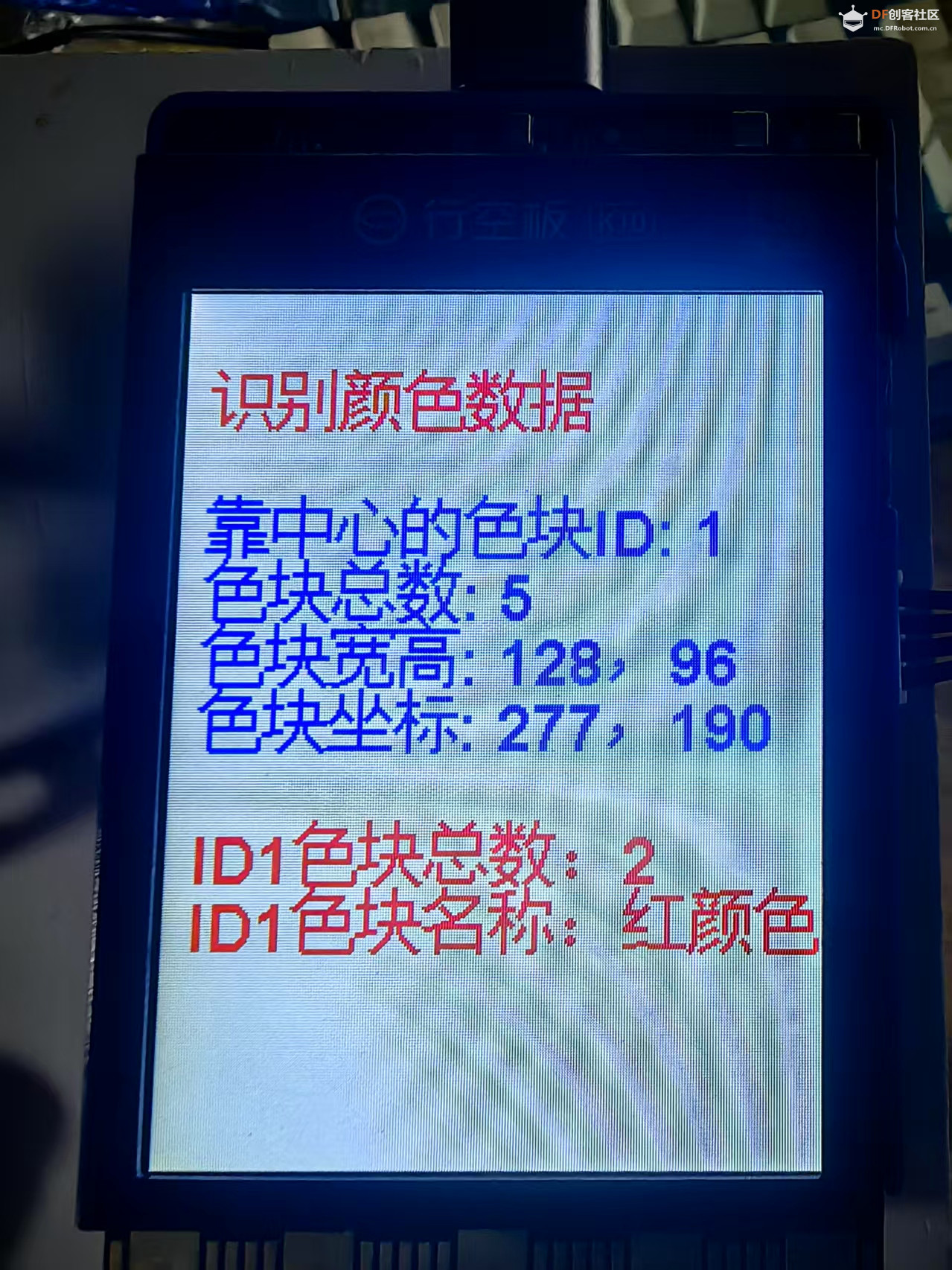
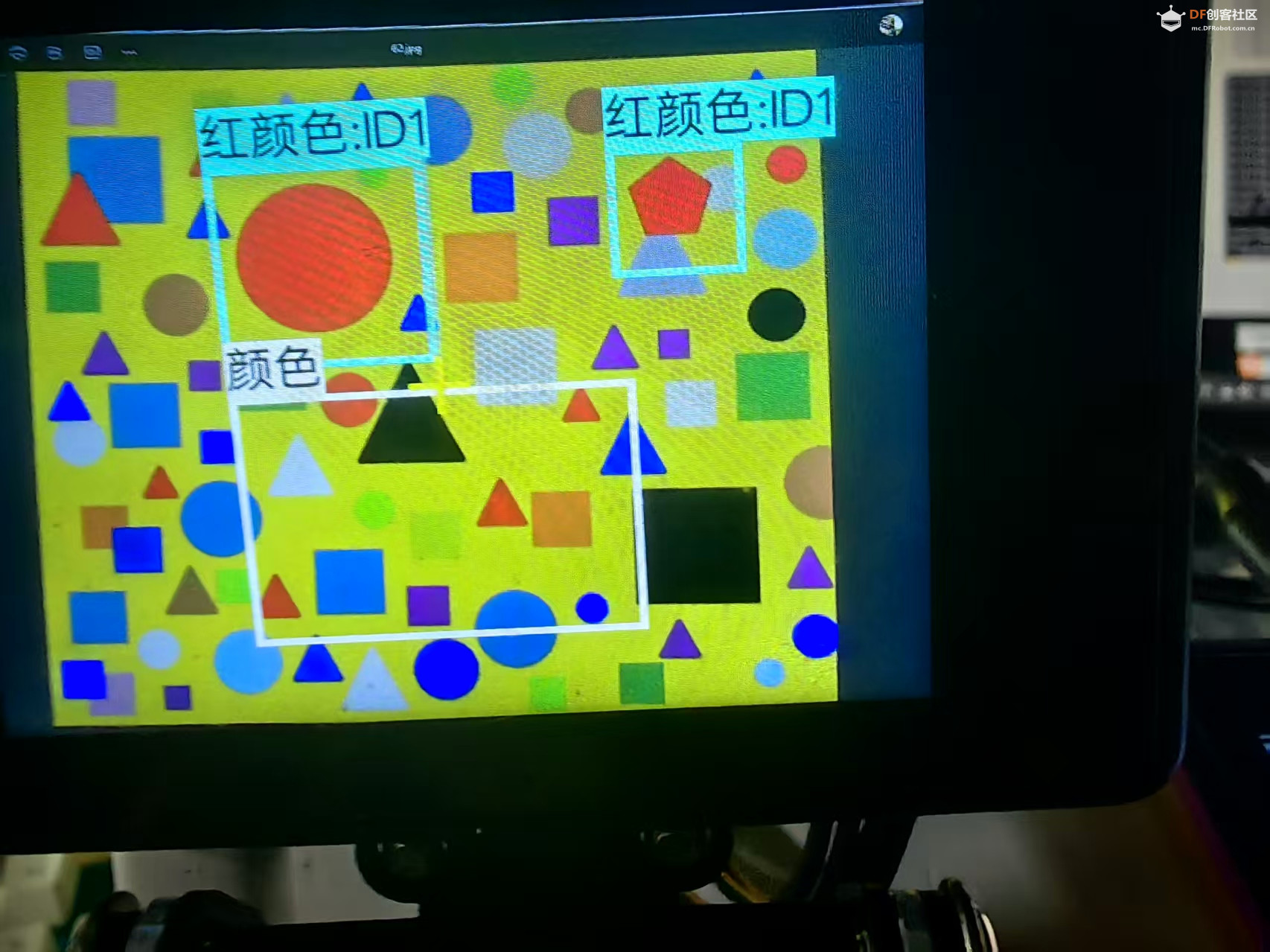
四、【花雕动手做】HUSKYLENS 2 AI视觉传感器之识别颜色输出相关数据 可识别HUSKYLENS 2视野内的色块,并输出色块相关数据,可以读取的数据有:靠近HUSKYLENS 2摄像头画面中心的色块ID号、检测到的色块总数、第一个检测到的色块ID号等。识别颜色后,可获取画面中指定颜色的相关数据。例如,判断某个指定的颜色是否在画面中、指定颜色的名称、可获取画面中相同的指定颜色的色块数量,当画面中出现多个相同颜色的色块时,可指定获取其中某个色块的相关参数,包括名称、X/Y坐标、宽度、高度。 1、实际测试的几个范本 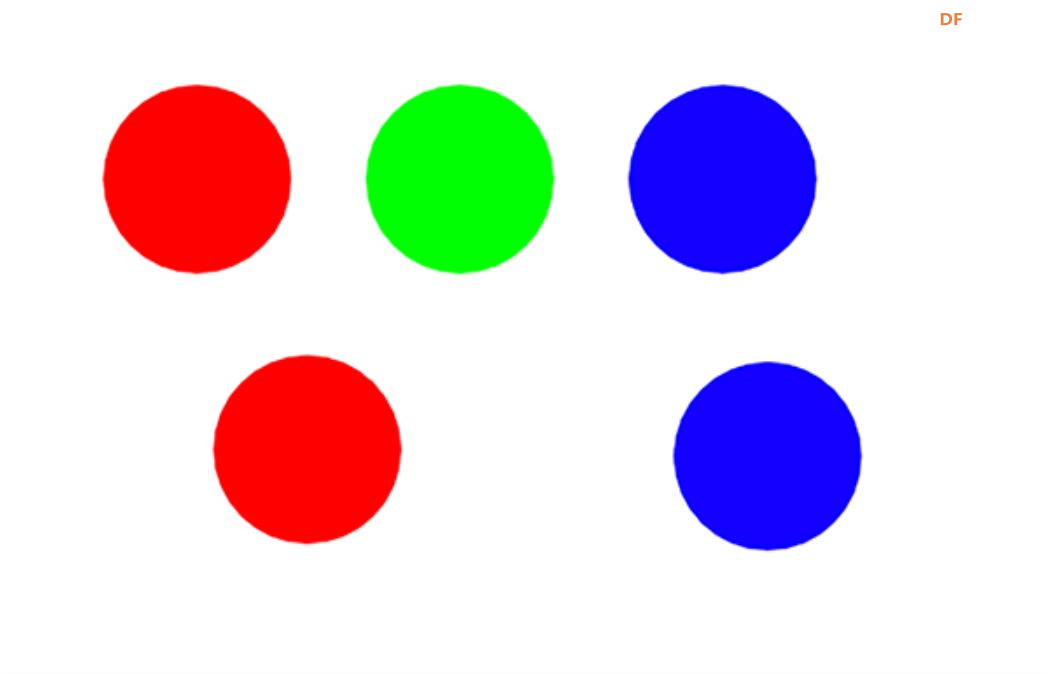    |
2、测试实验代码4、代码解读和架构分析: 系统架构与核心技术 1. 硬件系统架构 text ┌─────────────────┐ I2C通信 ┌──────────────────┐ │ ESP32-S3 │◄─────────────►│ HUSKYLENS 2 │ │ (主控制器) │ │ (AI视觉传感器) │ │ • 240MHz │ │ • Kendryte K230│ │ • 双核处理器 │ │ • OV7740摄像头│ └─────────────────┘ └──────────────────┘ │ │ SPI/并行接口 ▼ ┌─────────────────┐ │ UniHiker屏幕 │ │ (240x320 TFT) │ └─────────────────┘ 2. 软件架构层次 text 应用层: 颜色识别显示系统 ↓ 业务层: 双重查询策略(中心优先 + ID定向) ↓ 算法层: HUSKYLENS固件(颜色识别引擎) ↓ ├── 色彩空间转换 驱动层: I2C通信协议 + 屏幕驱动 ├── 颜色聚类算法 ↓ └── 区域特征提取 硬件层: 摄像头 + AI处理器 + 显示屏 代码执行流程深度分析 1. 初始化阶段技术细节 cpp 关键技术实现: 硬件抽象层:通过面向对象设计隐藏硬件差异 通信可靠性:I2C连接的重试机制确保系统稳定性 显示优化:双缓冲技术实现无闪烁更新 2. 主循环实时处理流水线 cpp 颜色识别核心技术栈 1. HUSKYLENS颜色识别算法流程 text 图像采集(OV7740传感器) ↓ 预处理(自动白平衡、曝光补偿) ↓ 色彩空间转换(RGB → HSV/Lab) ↓ 颜色阈值分割(预设颜色范围) ↓ 形态学操作(去噪、填充) ↓ 连通域分析(区域标记) ↓ 特征提取(重心、面积、边界框) ↓ 结果序列化(I2C数据包) 2. 颜色识别专用技术特性 色彩空间分析: HSV空间优势: H(色调):对光照变化不敏感 S(饱和度):区分颜色纯度 V(明度):处理亮度变化 区域检测算法: cpp 数据结构与信息架构 1. 颜色识别结果数据结构 cpp 2. 双重查询机制设计 中心优先查询策略: cpp 应用场景:视觉伺服、目标锁定 技术实现:计算所有色块到图像中心的距离,选择最近的一个 ID定向查询策略: cpp 应用场景:多目标跟踪、特定颜色识别 技术实现:维护ID到颜色特征的映射表 实时性能优化分析 1. 20Hz刷新率设计考量 cpp 图像采集:8-12ms (摄像头传感器读取和传输) 颜色处理:15-20ms (K210芯片上的算法执行) 数据通信:3-5ms (I2C协议数据传输) 显示渲染:5-8ms (文本渲染和缓冲区交换) 系统余量:8-12ms (处理波动和中断响应) 2. 数据处理优化策略 cpp 关键技术难点与解决方案 1. 光照适应性挑战 问题:环境光照变化影响颜色识别准确性 解决方案: 自动白平衡:实时调整图像色温 自适应阈值:根据环境光动态调整颜色范围 色彩归一化:消除光照对颜色感知的影响 2. 多目标跟踪挑战 问题:同时识别和跟踪多个颜色目标 解决方案: ID分配机制:为每个颜色区域分配唯一标识 时序一致性:基于运动预测的目标跟踪 数据关联:帧间目标匹配算法 应用场景技术适配 1. 工业分拣系统 技术要求: 高精度的颜色分类 快速的目标定位 多目标同时处理能力 2. 机器人视觉导航 技术要求: 实时的颜色目标跟踪 抗光照变化的鲁棒性 精确的空间位置信息 3. 智能交互系统 技术要求: 自然的人机交互接口 低延迟的视觉反馈 多模态信息融合 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶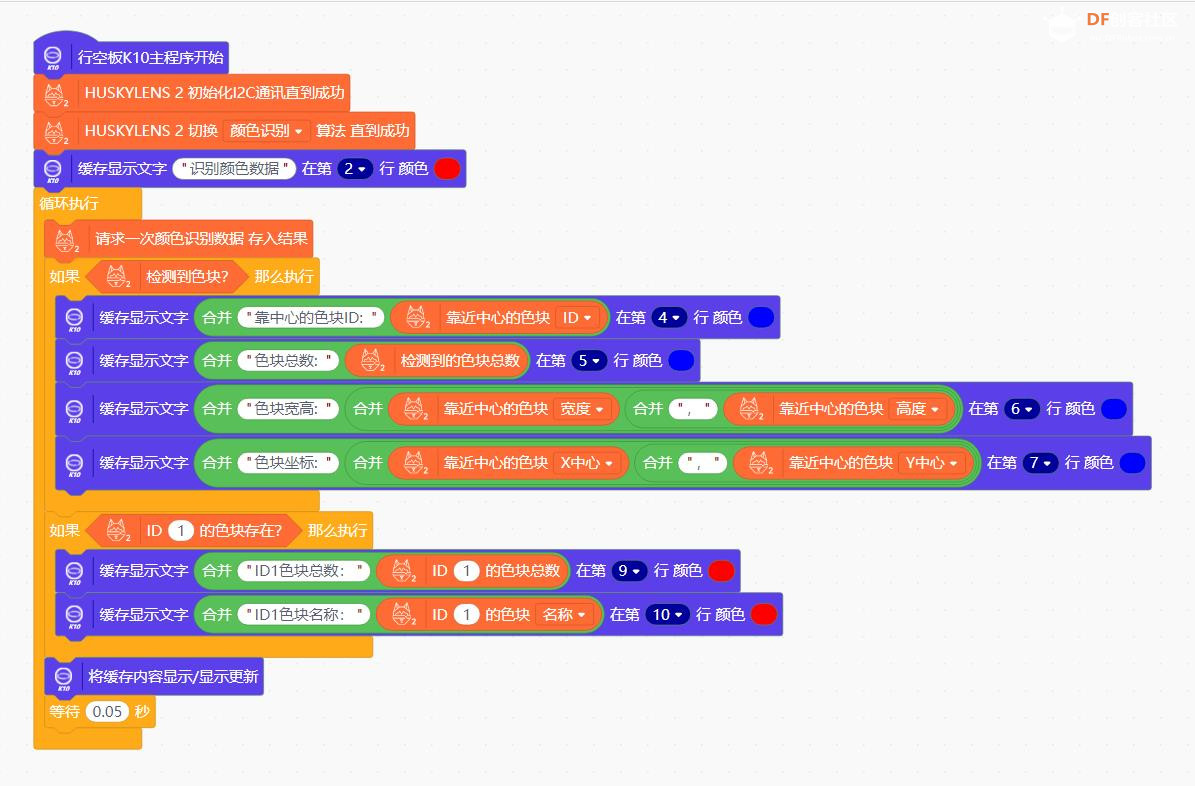




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






