|
81| 5
|
[试用测评] 【花雕动手做】AI 视觉传感器二哈识图2之识别物体数据 |
|
一、相关知识点 1、HUSKYLENS 2(二哈识图2)是DFRobot推出的新一代AI视觉传感器,搭载6TOPS算力的Kendryte K230双核RISC-V芯片,集成1GB LPDDR4内存与8GB存储,支持人脸识别、物体检测、姿态估计等20余种预置AI模型,同时允许用户通过自训练模型部署实现定制化识别 。其硬件配置包括200万像素摄像头、2.4英寸触摸屏、可更换镜头模组(支持显微/夜视)及RGB补光灯,搭配UART/I2C接口可无缝连接Arduino、树莓派等开发板,实现实时图传与多模态交互。内置MCP服务打通本地视觉与大模型能力,例如识别午餐图片后可生成膳食建议,而模型广场提供车牌识别、跌倒检测等垂直领域即用型方案。作为教育利器,它已融入《中小学人工智能通识教育指南》课程体系,通过Mind+图形化编程工具降低AI开发门槛,助力创客教育与STEAM实践。  2、行空板 K10 是一款专为中小学信息科技教学和创客项目设计的国产 AIoT 开发板,以 ESP32-S3 为核心,高度集成 2.8 英寸全彩 LCD 屏、摄像头、双麦扬声器、WiFi 蓝牙模块及温湿度、光线、加速度等多种传感器,无需额外配件即可实现离线语音识别(支持 200 词库)、人脸识别、二维码读取、物联网联动等功能,支持 Mind + 图形化编程与 MicroPython 代码编程,兼顾入门便捷性与功能扩展性,丰富的扩展接口还能连接外部传感器、执行器,轻松落地 AI、物联网类创意项目,是编程学习与科创实践的高性价比选择。  3、Mind + 是 DFRobot 旗下蘑菇云科创教育团队研发的、拥有自主知识产权的国产青少年编程软件,它兼容 Scratch3.0,既支持零基础学习者拖拽图形化积木编程,也能切换至 Python/C/C++ 代码编程,且积木可自动转换为对应代码助力进阶学习,同时适配行空板M10\ K10、Arduino、micro:bit 等众多主流开源硬件与上百种电子模块,集成图像识别、语音识别等 AI 功能及物联网开发能力,还搭配实时交互、程序烧录脱机运行等模式与丰富教学案例,适配校内外编程教学、创客项目及竞赛等场景,是兼顾低入门门槛与高拓展性的科创教育工具。 二、硬件连接 准备材料 行空板K10 x 1 HUSKYLENS 2 x 1 USB数据线 x 2 4pin连接线(或杜邦线)x 1 准备一根USB数据线和一根4Pin白色硅胶线。使用USB数据线连接电脑与行空板K10,使用4Pin黑胶先连接行空板K10与HuskyLens 2,再使用额外的USB数据线n连接示意图如下连接HUSKYLENS 2的Type-C接口与电源,为HUSKYLENS 2进行额外供电。接线图可参考下图。    |
|
三、物体识别(Object Recognition)是计算机视觉领域中的核心技术之一,其主要目标是:让计算机或智能设备能够“看懂”图像中的物体,并准确判断其类别、位置和属性。物体识别是让机器“看懂世界”的关键一步。它是人工智能“视觉理解”的基础,广泛应用于自动驾驶、安防监控、智能机器人、图像搜索、增强现实等场景。 (1)物体识别的基本定义 物体识别是指: 通过图像处理与深度学习算法,自动识别图像或视频中存在的物体,并标注其类别(如人、车、猫)与位置(如边框、坐标)。 它不仅判断“这是什么”,还能指出“它在哪里”。 (2)物体识别的关键流程 图像采集:通过摄像头或图像文件获取视觉数据。 特征提取:分析图像中的颜色、纹理、形状、边缘等特征。 分类判断:使用训练好的模型判断物体属于哪个类别。 位置定位:标出物体在图像中的具体位置(如边框或关键点)。 结果输出:返回识别结果供系统使用或用户查看。 (3)与相关技术的区别 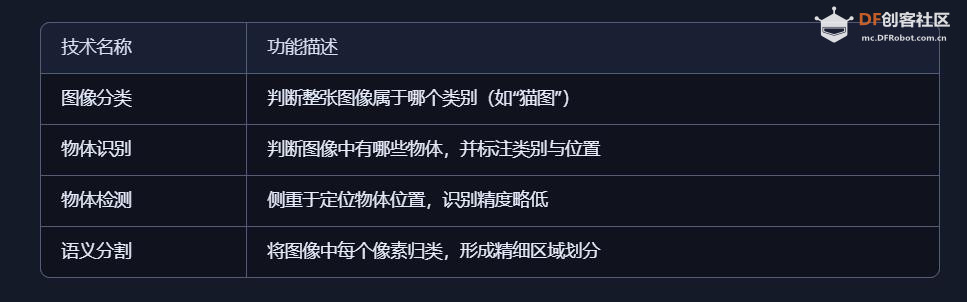 (4)应用场景举例 自动驾驶识别行人、车辆、交通标志 安防系统识别可疑人物或物品 手机相册自动分类人物、动物、风景 教育实验识别颜色球、标签、手势等 智能零售识别商品并自动结算 机器人识别目标物体并进行抓取或互动 (5)常见识别模型与算法  (6)相关场景    |
|
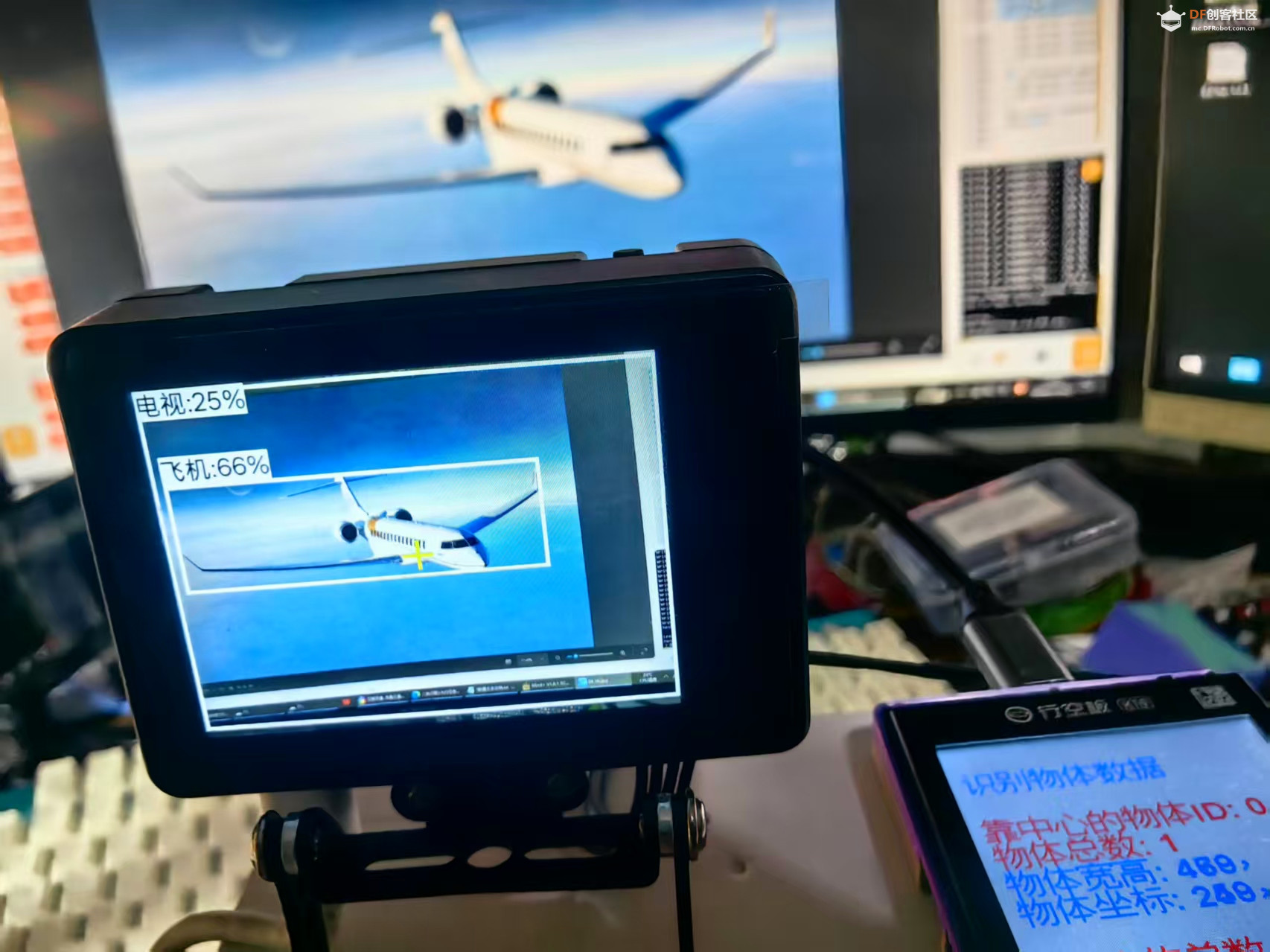
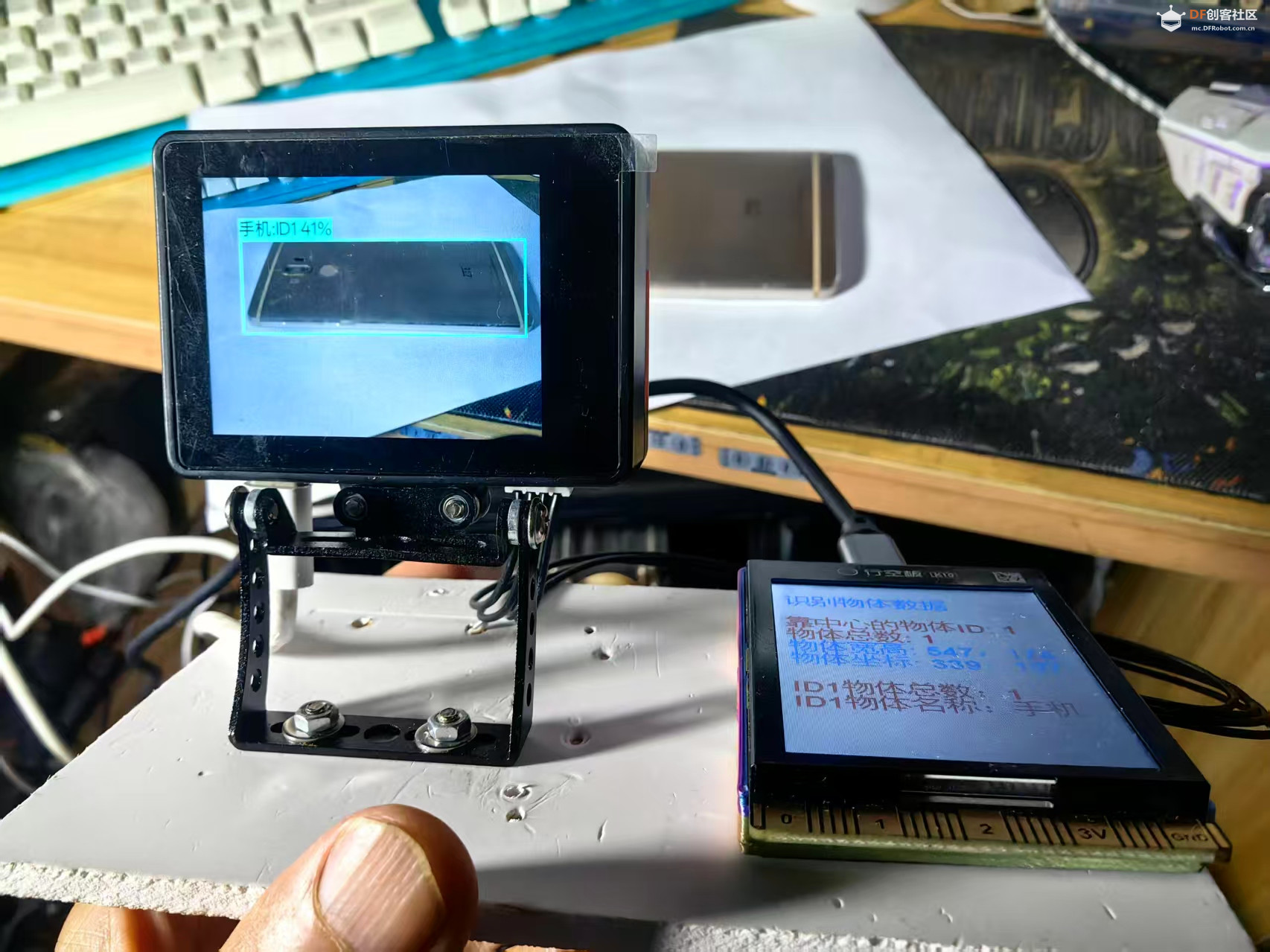
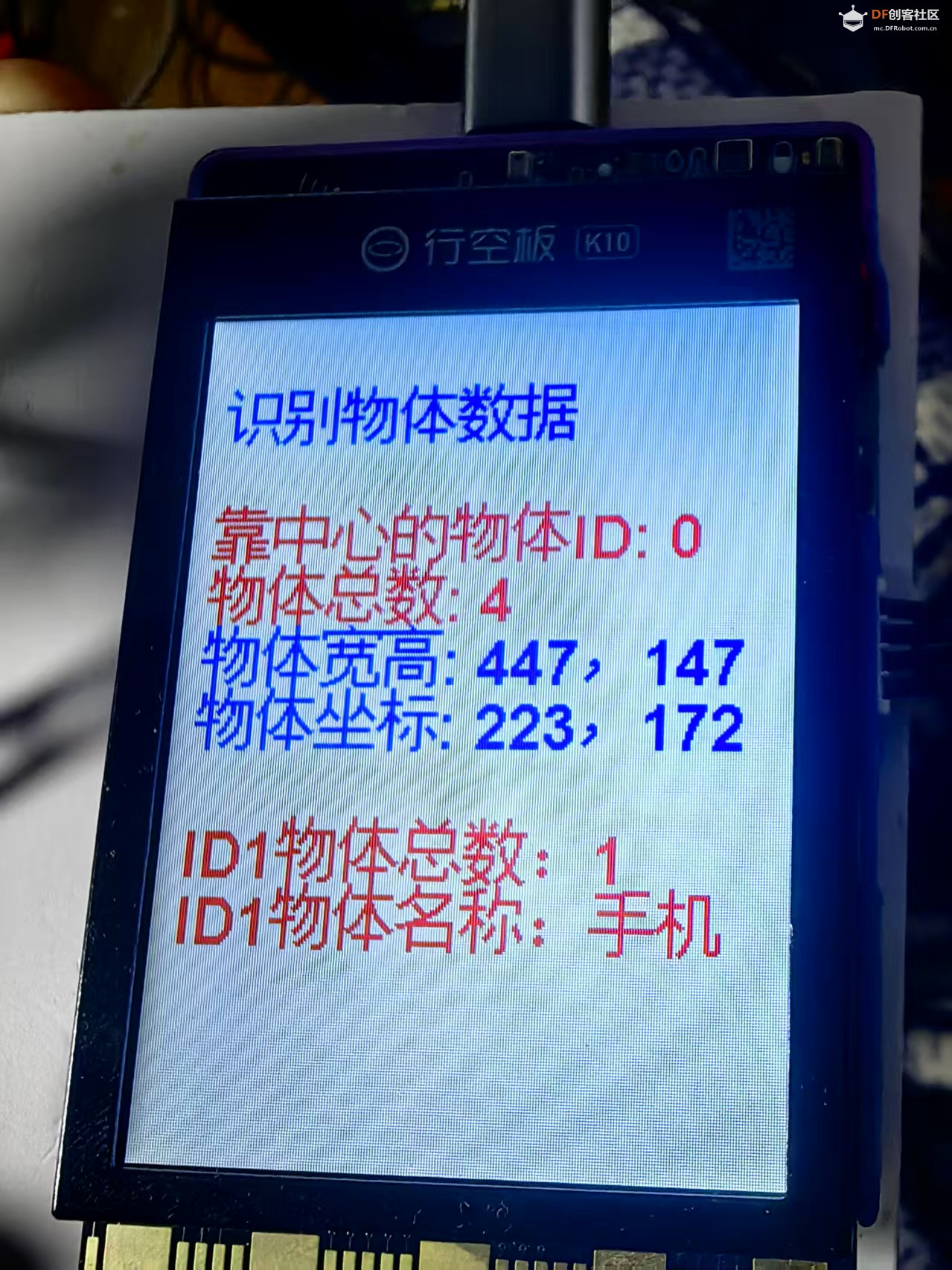
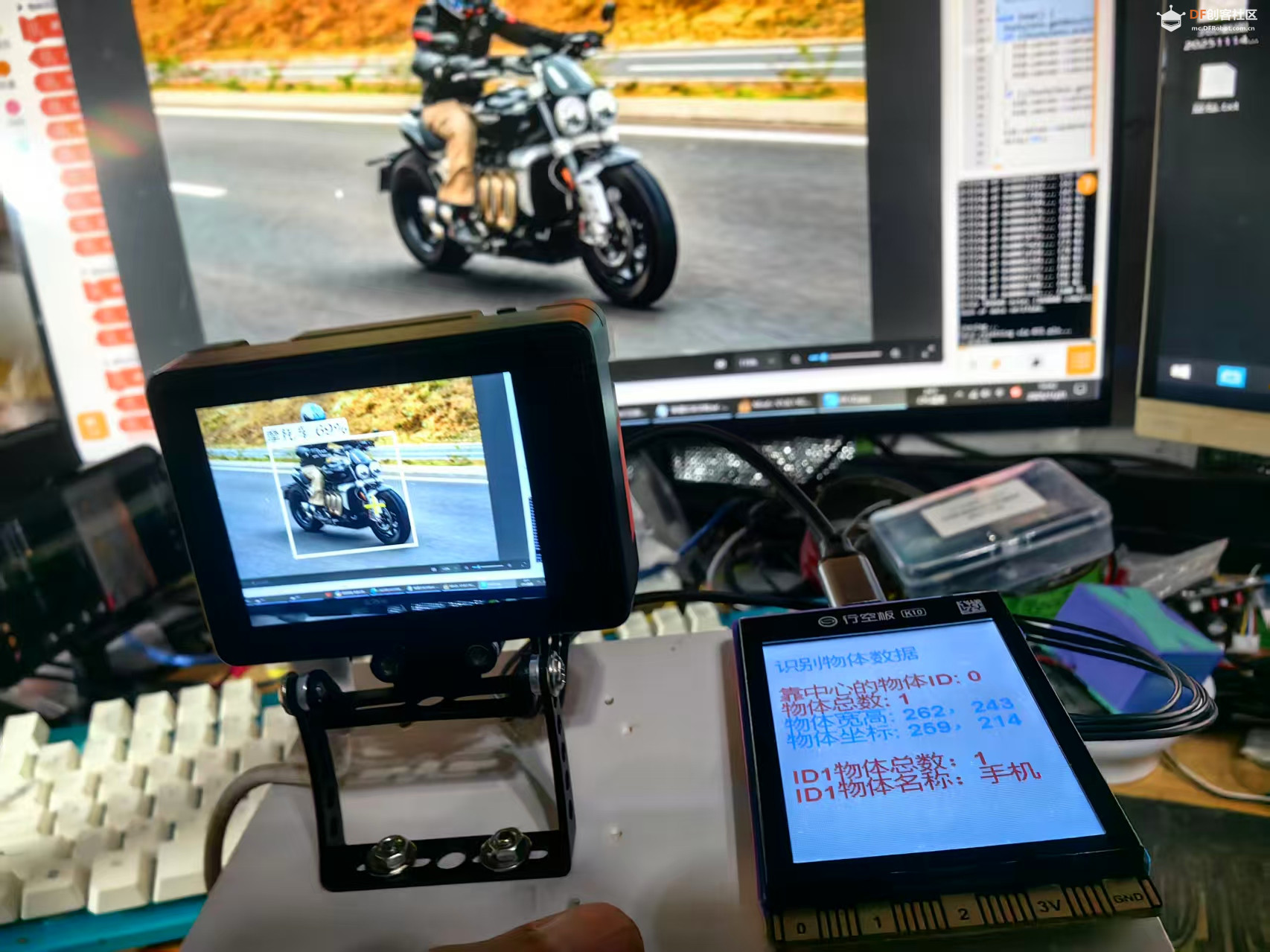
四、【花雕动手做】HUSKYLENS 2 AI视觉传感器之识别物体输出相关数据 可识别HuskyLens 2视野内的物体(须是可识别的80种固定类别物体,详见物体识别功能介绍),获取物体相关数据,可以读取的数据有:画面中可识别物体的总数、靠近HuskyLens 2摄像头画面中心的物体ID号、检测到的第一个物体。识别物体后,可获取画面中指定物体的相关数据。例如,判断某个指定的物体是否在画面中、指定物体的名称、可获取画面中指定同类物体的数量,当画面中出现多个同类物体时,可指定获取其中某个物体的相关参数,包括名称、X/Y坐标、宽度、高度。 1、实际测试的几个范本     |
2、测试实验代码代码解读和架构分析: 系统架构与核心技术栈 1. 硬件系统架构 text ┌─────────────────┐ I2C通信 ┌──────────────────┐ │ ESP32-S3 │◄─────────────►│ HUSKYLENS 2 │ │ (主控制器) │ │ (AI视觉传感器) │ │ • 240MHz │ │ • Kendryte K210│ │ • 双核处理器 │ │ • 深度学习加速│ └─────────────────┘ └──────────────────┘ │ │ 显示接口 ▼ ┌─────────────────┐ │ 行空板K10屏幕 │ │ (用户界面) │ └─────────────────┘ 2. 软件架构层次 text 应用层: 物体识别显示系统 ↓ 控制层: 双重查询策略(中心优先 + ID定向) ↓ 算法层: HUSKYLENS物体识别引擎 ↓ ├── 目标检测(YOLO/SSD) 驱动层: I2C协议 + 显示驱动 ├── 特征提取(CNN) ↓ └── 非极大值抑制 硬件层: 摄像头 + AI芯片 + 显示屏 代码执行流程深度分析 1. 初始化阶段技术细节 cpp 关键技术特性: 硬件抽象:统一的API封装底层硬件差异 连接可靠性:自动重试确保传感器可用性 显示优化:双缓冲消除屏幕闪烁 2. 主循环实时处理流水线 cpp 物体识别核心技术解析 1. HUSKYLENS物体识别算法流程 text 图像采集(OV摄像头) ↓ 图像预处理(归一化、尺寸调整) ↓ 神经网络前向推理(MobileNet-SSD/YOLO) ↓ 边界框回归(坐标预测) ↓ 置信度过滤(阈值0.5以上) ↓ 非极大值抑制(去除重叠框) ↓ 类别解码(输出物体标签) ↓ 结果序列化(I2C数据包) 2. 深度学习模型特性 支持的物体类别(典型): cpp 模型性能指标: 推理速度:~30ms (K210 @ 400MHz) 检测精度:mAP ~60% (COCO数据集) 输入分辨率:320x240 / 640x480 支持类别:20-80种常见物体 数据结构与信息架构 1. 物体识别结果数据结构 cpp 2. 双重查询机制技术实现 中心优先查询算法: cpp ID定向查询机制: cpp 实时性能优化策略 1. 20Hz处理周期分析 cpp text ┌─────────────────────────────────────────────┐ │ 图像采集(8ms) │ 神经网络推理(25ms) │ 后处理(5ms) │ ├─────────────────────────────────────────────┤ │ 数据传输(3ms) │ 显示渲染(6ms) │ 系统余量(3ms) │ └─────────────────────────────────────────────┘ 2. 数据处理优化技术 cpp |
测试实验代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶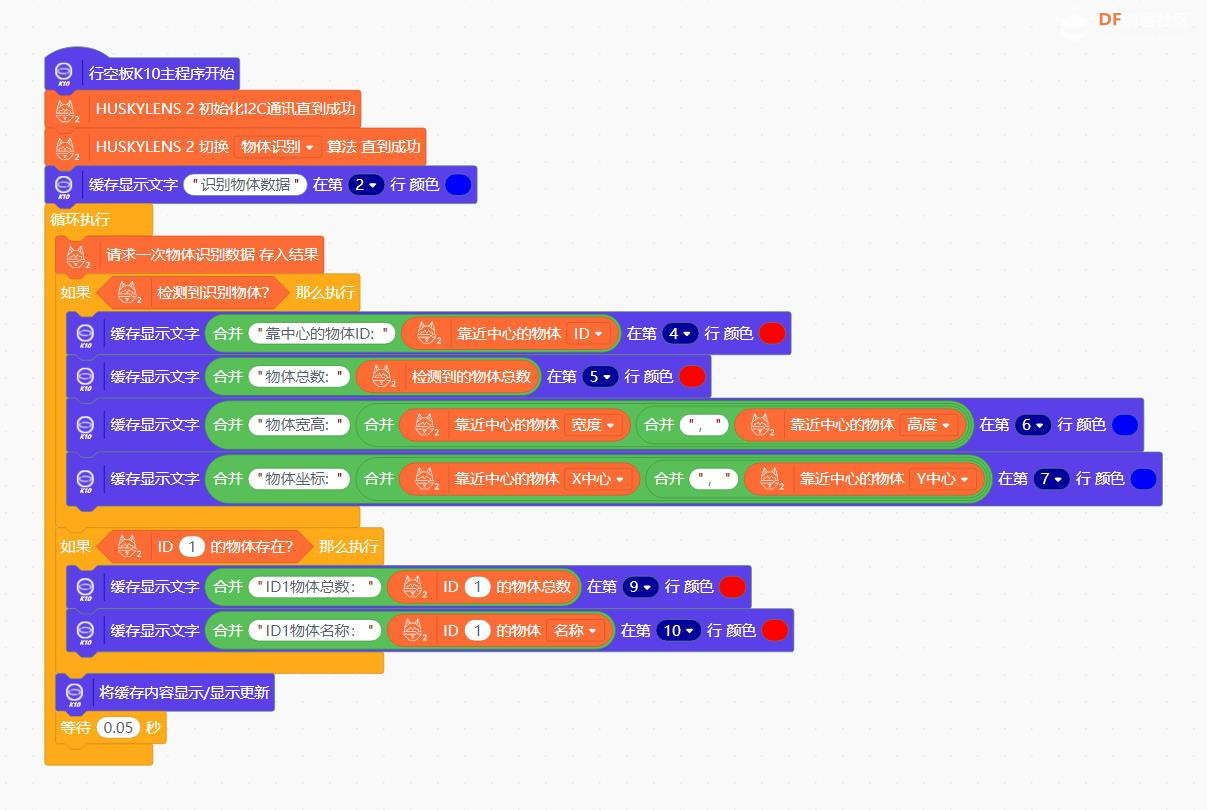



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






