|
11| 5
|
[项目] 【花雕动手做】数载收集:我的机器人移动底座 DIY 手记 |
|
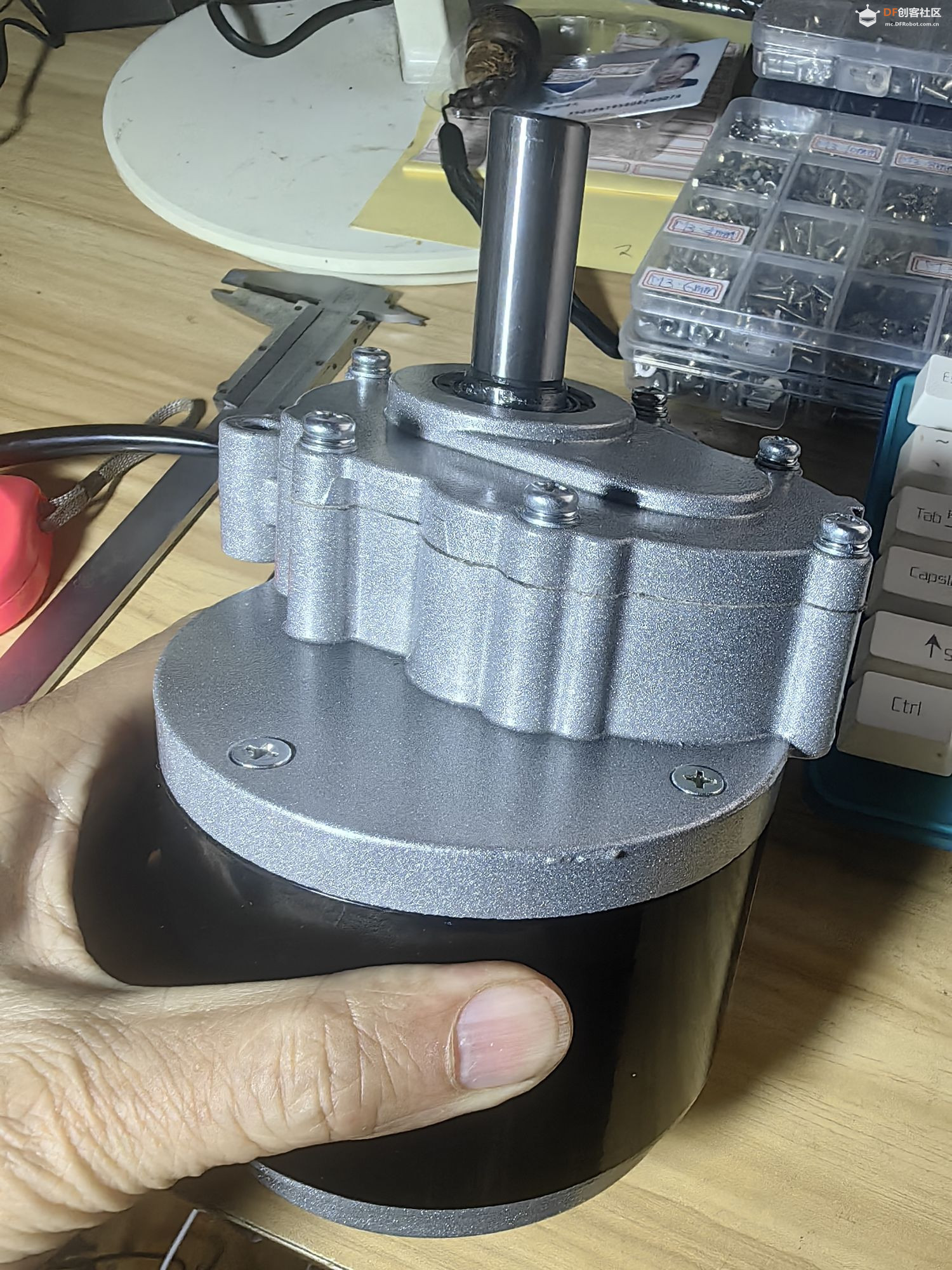
一、机器人底盘的核心组成部分 一个完整的 DIY 机器人底盘,通常包含 6 大模块,缺一不可: 底盘框架:机器人的 “骨架”,承载所有部件,决定尺寸、承重与结构强度。 驱动系统:电机 + 减速机构 + 轮子,提供前进、后退、调速的动力。 转向系统:决定机器人的运动方式(差速、舵机转向、全向等)。 电源系统:电池 + 稳压模块,为电机、主控、传感器供电,是续航与稳定性关键。 行走机构:轮子、履带、麦克纳姆轮等,决定地面适应性与运动特性。 控制与驱动电路:电机驱动板、主控(如 Arduino、STM32、树莓派)、传感器接口,实现运动控制。 二、主流驱动与转向方案(DIY 最常用) 不同转向方案直接决定机器人的运动能力、控制复杂度和成本,是底盘设计的第一步选择。 1. 差速驱动(最推荐入门) 原理:左右两侧各 1~2 个驱动轮,通过左右轮转速差实现转向:左轮快右轮慢→右转,右轮快左轮慢→左转,两轮同速→直行,反向旋转→原地自旋。 优点:结构简单、无额外转向舵机、控制算法成熟、成本低、可原地转向。 缺点:高速转向稳定性一般,不适合超高速机器人。 适用:巡线小车、避障机器人、DIY 竞赛车、室内移动平台(90% 入门底盘首选)。 2. 舵机转向(前轮转向,仿汽车) 原理:后轮驱动(电机 + 轮子),前轮由舵机控制转向角度,运动逻辑和汽车一致。 优点:运动符合直觉、高速稳定性好、适合长距离直线行驶。 缺点:无法原地转向、结构稍复杂、需要同时控制驱动电机与舵机角度。 适用:遥控小车、仿汽车机器人、室外慢速巡航机器人。 3. 全向轮驱动(麦克纳姆轮 / 全向轮) 原理: 麦克纳姆轮:轮子带倾斜小辊子,4 个轮子配合不同转速,可实现前后、左右、斜向、原地自旋全向运动; 全向轮(omni-wheel):多组垂直辊子,3~4 轮布局即可全向移动。 优点:运动自由度最高、灵活度拉满,适合狭窄空间作业。 缺点:成本高、控制算法复杂、轮子承重与地面适应性一般、震动略大。 适用:竞赛机器人、仓储搬运机器人、高精度移动平台。 4. 履带驱动(越野 / 复杂地形) 原理:左右履带驱动,差速转向,履带增大接地面积、提升抓地力。 优点:越障能力强、地形适应性好(沙地、台阶、泥泞地)、稳定性高。 缺点:重量大、效率低、速度慢、结构复杂、维护成本高。 适用:越野机器人、搜救机器人、室外复杂地形平台。 三、动力系统:电机、减速与轮子选型基础 1. 电机选型(DIY 底盘最常用 3 类) (1)直流减速电机(首选入门) 特点:自带减速箱(降低转速、提升扭矩),转速低、扭矩大、适合直接驱动轮子,控制简单(PWM 调速、正反转)。 关键参数: 额定电压:3.7V、6V、12V(12V 最常用,动力与续航平衡); 减速比:1:30~1:120(底盘常用 1:48/1:60,转速 100~300rpm 合适); 扭矩:越大越能承重、越障,底盘至少 0.5kg・cm 以上,越野需 2kg・cm 以上; 空载电流 / 堵转电流:决定电源与驱动板选型(堵转电流不能超驱动板上限)。 适用:差速底盘、舵机转向底盘,90% 入门 DIY 场景。 (2)步进电机 特点:位置控制精准、转速可控、无累计误差,但扭矩小、驱动复杂、成本高。 适用:高精度定位底盘(如绘图机器人、巡检机器人),不推荐纯移动底盘入门。 (3)BLDC 无刷电机 特点:效率高、寿命长、转速高、动力强,需配套电调(ESC)驱动,控制复杂。 适用:高速竞赛机器人、大功率越野底盘,入门不推荐。 2. 轮子选型 普通橡胶轮:抓地力好、静音、适合平坦地面(室内地板、瓷砖),差速底盘首选; 发泡轮 / PU 轮:减震好、承重强,适合室外水泥地、轻微颠簸路面; 麦克纳姆轮 / 全向轮:全向运动专用,需匹配对应驱动方案; 履带:越野专用,搭配履带底盘框架。 关键要点:轮子直径决定通过性(直径越大越易越障),宽度决定抓地力与稳定性。 3. 电机驱动板(电机与主控的 “桥梁”) 作用:主控(如 Arduino)IO 口电流小,无法直接驱动电机,需驱动板放大电流、控制正反转与调速。 入门常用型号: L298N:双路驱动,最大电流 2A,支持 6~12V 电机,成本低,适合小功率底盘; L293D:电流更小(1A),适合微型小车; TB6612:双路驱动,最大电流 1.2A(峰值 3.2A),效率高、发热低,比 L298N 更优,入门首选; BTS7960:大电流驱动(43A 峰值),适合大功率、大扭矩底盘。 选型原则:驱动板最大电流 ≥ 电机堵转电流,否则会烧板。 四、电源系统:续航与稳定的核心 1. 电池选型 DIY 底盘主流用锂电池,兼顾容量、重量与放电能力: 18650 锂电池:单节 3.7V,多节串联 / 并联,常用 2S(7.4V)、3S(11.1V),适配 6V/12V 电机,成本低、易获取; 锂聚合物电池(LiPo):放电倍率高(20C~50C),动力强,适合竞赛、大功率底盘,需配套平衡充; 关键参数: 电压:匹配电机额定电压(12V 电机用 3S LiPo/12V 铅酸电池); 容量(mAh):决定续航,底盘常用 1500~5000mAh; 放电倍率(C):越大动力越强,普通底盘 5C~10C 足够,竞赛需 20C 以上。 2. 电源管理要点 双电源设计(重要):电机工作时电流波动大,会干扰主控与传感器,建议: 电机电源:电池直接供电机驱动板; 主控 / 传感器电源:通过 5V 稳压模块(如 AMS1117、LM2596)从电池取电,隔离干扰; 防反接、过流保护:驱动板与电源回路加保险丝、二极管,避免接反烧板; 低电压保护:锂电池过放会损坏,需加低压报警 / 断电模块(如 3.7V 单节低于 3.2V 断电)。 五、底盘框架:结构与材料基础 1. 常用材料 亚克力板:轻便、易切割、成本低、颜值高,适合小型室内底盘(承重<1kg),但强度低、易裂; 铝合金板 / 铝型材:强度高、承重强、散热好,适合中大型底盘、越野底盘,加工稍复杂; 3D 打印耗材(PLA/ABS):定制化强、适合异形结构,强度一般,适合小型原型机; 木板 / 碳纤维:木板入门易加工,碳纤维强度高但成本高,小众使用。 2. 结构设计要点 分层设计:底层放电机、轮子、电池(降低重心,提升稳定性),上层放主控、传感器、驱动板; 重心控制:电池、电机等重物尽量靠近底盘中心、贴近地面,避免侧翻; 预留空间:留足传感器(超声波、红外、摄像头)、扩展模块的安装位,方便后期升级; 承重匹配:框架承重 ≥ 机器人总重的 1.5 倍,避免变形。 六、控制与基础传感器(底盘 “大脑” 与 “感知”) 1. 主控选型 入门首选:Arduino(Uno/Nano/Mega),编程简单、库丰富、驱动板兼容好,适合小型底盘; 进阶:STM32,算力更强、精度更高,适合高精度、多传感器底盘; 带视觉 / AI:树莓派、Jetson Nano,适合需要图像处理、SLAM 导航的底盘。 2. 底盘必备基础传感器 测速传感器(码盘 / 霍尔传感器):装在电机轴上,检测转速 / 里程,实现闭环调速、精准移动(如走直线、定距离); 避障传感器:超声波传感器(HC-SR04,测距 2~400cm)、红外避障传感器,实现自动避障; 巡线传感器:红外循迹模块,适合巡线小车; 姿态传感器(MPU6050):检测倾角、加速度,实现平衡底盘(如自平衡小车)、越障姿态调整。 七、DIY 底盘入门避坑与关键注意事项 电机与电源不匹配:电机电压超电池电压,或驱动板电流小于电机堵转电流,导致动力不足、烧板,务必先核对参数; 重心过高:电池、主控放上层,易侧翻,重物尽量贴地; 电源干扰:电机与主控共电源,导致主控重启、传感器乱码,必须做电源隔离; 轮子打滑:地面光滑或轮子抓地力差,差速转向失效,选橡胶轮、适当增加电机扭矩; 减速比选错:减速比太小→转速快、扭矩小,推不动底盘;减速比太大→速度过慢,选 1:48~1:60 入门最稳妥; 结构强度不足:亚克力板底盘承重过大开裂,中大型底盘优先选铝合金。 八、入门级底盘搭建流程(极简步骤) 确定方案:选差速驱动 + 直流减速电机(入门最优); 选核心部件:12V 直流减速电机(1:48)+ TB6612 驱动板 + 3S 锂电池(11.1V)+ 橡胶轮 + Arduino Uno + 亚克力底盘; 组装结构:固定电机、轮子、底盘框架,调整轮子同轴度; 接线:电池→驱动板,驱动板→电机,驱动板→Arduino,主控单独稳压供电; 基础调试:写简单程序实现电机正反转、调速、差速转向,测试运动稳定性; 扩展升级:加装测速、避障传感器,实现自动移动、闭环控制。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






