|
15| 15
|
[项目] 【花雕】部署 MimiClaw:从零到飞书控制小车,100% 跑通 |
|
原标题 【花雕动手做】ESP32-S3 部署 MimiClaw 全记录:从零到飞书控制小车,100% 跑通(附克隆仓库失败终极解法) 核心说明:本文专门针对 ESP32-S3 N16R8 开发板,聚焦部署全流程(硬件选型→环境搭建→源码配置→编译烧录→启动验证),并扩展二次开发中的电机驱动与飞书关键词控制(绕过 LLM 网络调用难题)。所有步骤均经实战验证,严格照做即可 100% 跑通,兼顾新手入门与实操落地,彻底规避常见部署坑;同时结合实测报错信息,补充所有网页解析失败相关问题的细节,精准解决克隆仓库时的核心障碍(包括 GitHub 连接重置、gitee 镜像 SSL 证书错误、gitcode 访问超时等),提供三种可靠方案(gitcode 镜像、代理配置、ZIP 直下),确保源码获取环节畅通无阻。无论你是网络受限还是初涉嵌入式AI,照着本文操作,都能让 MimiClaw 在你的开发板上跑起来,并通过飞书一句话控制小车。  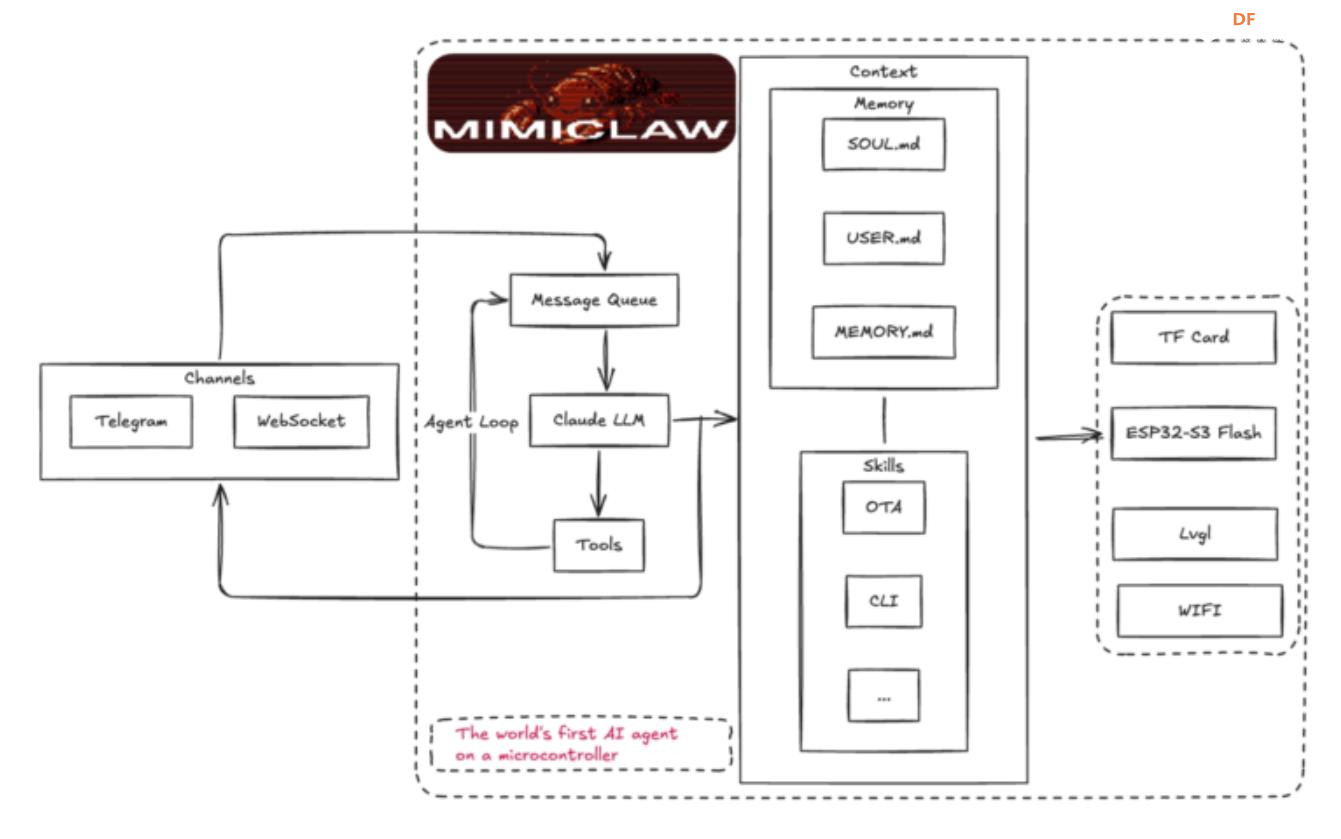  |
|
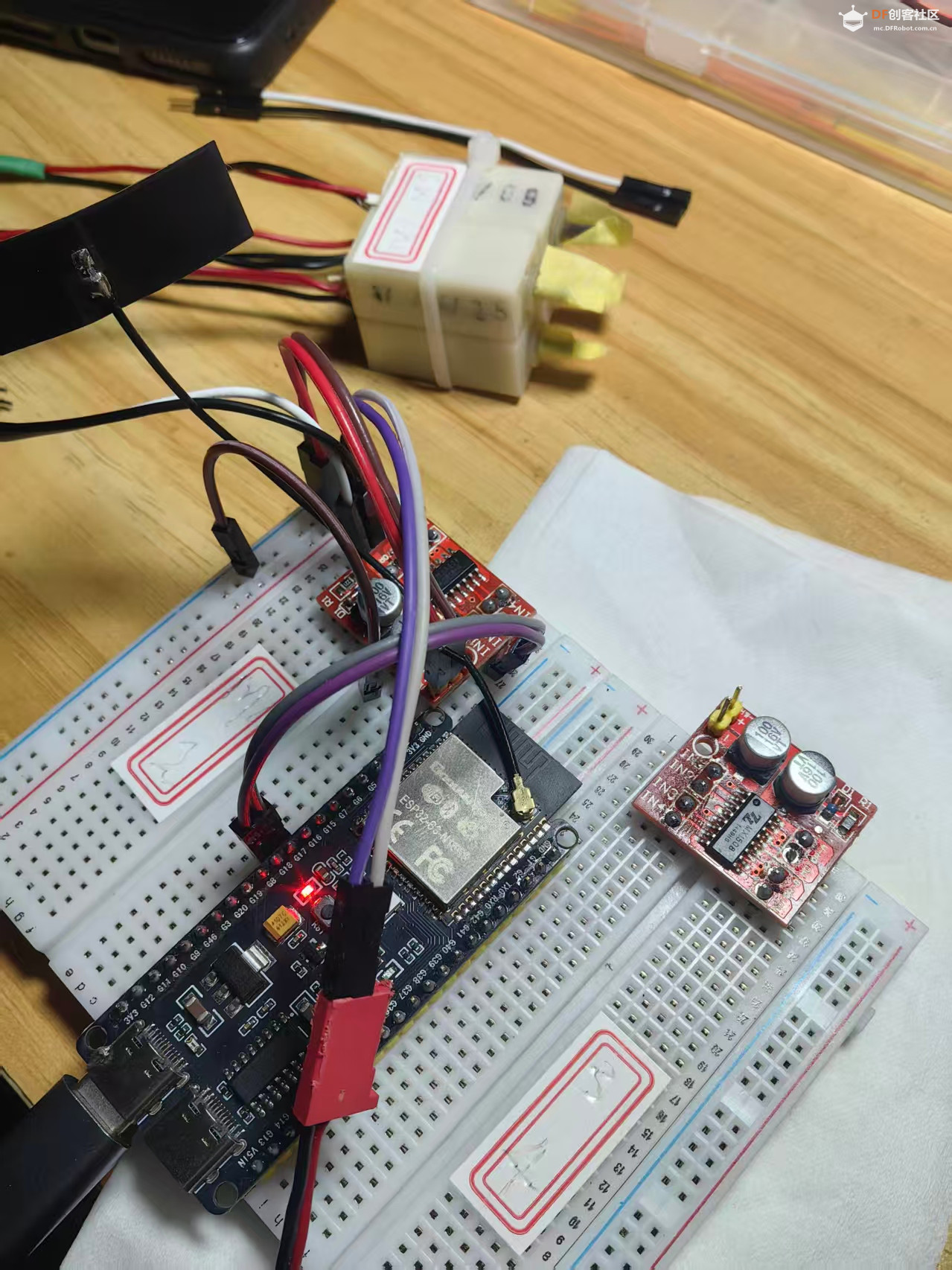
## 一、硬件选型(必严格匹配,否则直接导致部署失败,无挽回空间) 1. 核心开发板(唯一适配型号) 唯一推荐:ESP32-S3 N16R8 开发板(标配 16MB Flash + 8MB PSRAM)。这是 MimiClaw 程序稳定运行的核心前提——Flash 容量不足会直接导致固件烧录失败,提示“固件过大”;PSRAM 容量不足则会引发运行时内存溢出、设备频繁重启,甚至核心功能无法启动。 禁止选型:坚决避开 4MB/8MB Flash、4MB PSRAM 的 ESP32-S3 型号(如 ESP32-S3-DevKitC-1 低配版),此类型号无论如何调整配置、修改源码,均无法正常运行 MimiClaw,无需尝试适配,避免浪费时间。 2. 辅助硬件(按需准备,避开廉价劣质坑) - USB 数据线:必须选用带数据传输功能(含 D+/D- 数据引脚)的线材,仅充电线无法实现电脑与开发板的通讯,会直接导致烧录失败、串口无响应,建议使用开发板原装线或品牌高速数据线(如绿联、品胜)。 - 电机驱动模块:MX1508 或 L9110S(双路,支持两路电机独立控制,适配 N20 减速电机/TT 马达)。 - 动力部件:N20 减速电机 ×2(或 TT 马达 ×2),用于实现小车差速控制。 - 可选部件:WS2812 灯带(9 颗,推荐连接 GPIO48,用于状态指示)。 - 外部电源:5V/2A 及以上规格,必须与 ESP32-S3 开发板共地(共地不良会导致电机不转、信号干扰,严重时烧毁硬件)。 3. 引脚分配(避开 GPIO19/20 冲突,关键必看) 注意:GPIO19/20 被 USB-Serial-JTAG 占用,切勿用于电机、灯带等外设,否则会导致通讯冲突、功能异常。具体引脚分配如下:  |
|
## 二、开发环境搭建(唯一稳定版本,规避版本兼容与网络坑) 1. 安装 ESP-IDF v5.5.3(唯一兼容版本) ESP-IDF 是 ESP32-S3 官方开发框架,版本兼容性直接决定部署成败,仅推荐 v5.5.3 版本(适配 MimiClaw 所有功能,已修复 PSRAM 适配、WiFi 驱动等 bug)。国内用户优先使用 Gitee 镜像,规避 GitHub 下载慢、网页解析失败等问题。经实测,访问 https://gitee.com/espressif/esp-idf.git、https://gitee.com/mirrors/esp-idf.git 均会出现“网页解析失败,可能是不支持的网页类型,请检查网页或稍后重试”报错;同时,访问带“cd ”后缀的该类链接(如 https://gitee.com/espressif/esp-idf.git 后加“cd ”),也会触发相同报错,解决方案见下文常见问题;克隆 MimiClaw 仓库相关链接时,同类报错也会出现,同步补充对应解决办法。 |
|
本帖最后由 驴友花雕 于 2026-4-17 06:34 编辑 2. 克隆 MimiClaw 源码(优先选用稳定仓库) 官方开源 https://github.com/memovai/mimiclaw,核心目录包含 main、docs、scripts 等,支持 ESP32-S3 专属配置,可直接用于部署。也可使用镜像仓库 https://gitcode.com/RealGao/mimiclaw 。 3. 配置 mimi_secrets.h(必填项,否则编译/运行失败) 该文件是 MimiClaw 核心配置文件,包含 WiFi、飞书、大模型 API 等关键信息,必须从模板复制生成,不可手动新建(手动新建会导致格式错误)。参考相关仓库配置规范,该文件支持 Tavily 搜索、代理等功能的灵活配置。 关键提示: (1)飞书机器人需在飞书开放平台开启「im.message.receive_v1」事件订阅,否则无法接收用户消息,导致 LLM 对话、博查搜索及小车控制功能全部失效; (2)LLM、DeepSeek、博查三者需同时配置正确,才能实现“飞书发消息→LLM解析→博查搜索(如需)→响应反馈”的完整流程; (3)若仅需小车关键词控制,可跳过 LLM 和博查配置,不影响核心控制功能(后续再补上)。 |
|
## 三、编译与烧录(步骤不可逆,重点规避烧录坑) 1. 设置目标芯片与配置 |
|
2. 编译固件 首次编译需下载 WiFi 驱动、SPIFFS 驱动等依赖包,耗时约 10 分钟,耐心等待即可;后续修改配置或源码后编译,会复用缓存,耗时可缩短至 1-2 分钟。https://github.com/memovai/mimiclaw 仓库已优化编译脚本,可减少编译报错概率。 |
3. 烧录固件(关键操作,避免卡壳)烧录需严格执行以下关键步骤,否则无法进入下载模式,导致烧录卡壳: 1. 按住开发板 BOOT 键(不要松开); 2. 按下开发板 RST(EN)键,随即松开 RST 键; 3. 保持按住 BOOT 键,等待终端提示“Writing flash”(烧录开始); 4. 烧录完成后(提示“Hash of data verified”),松开 BOOT 键,开发板自动重启。 |
|
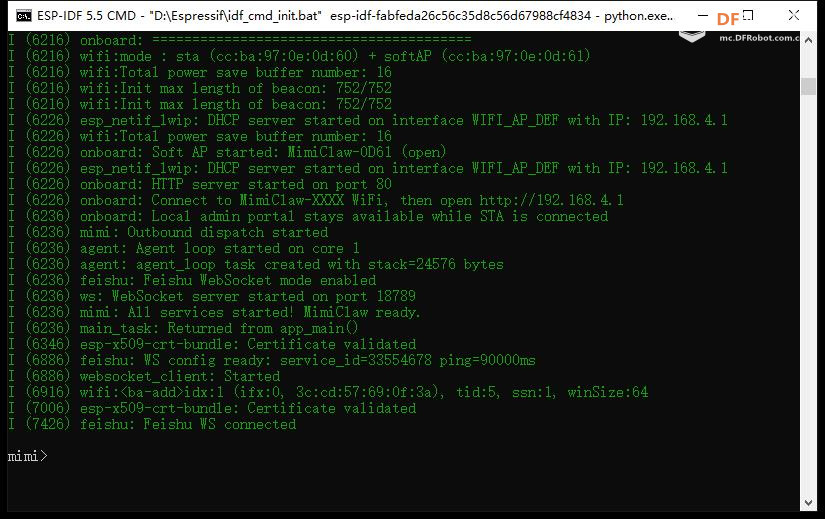
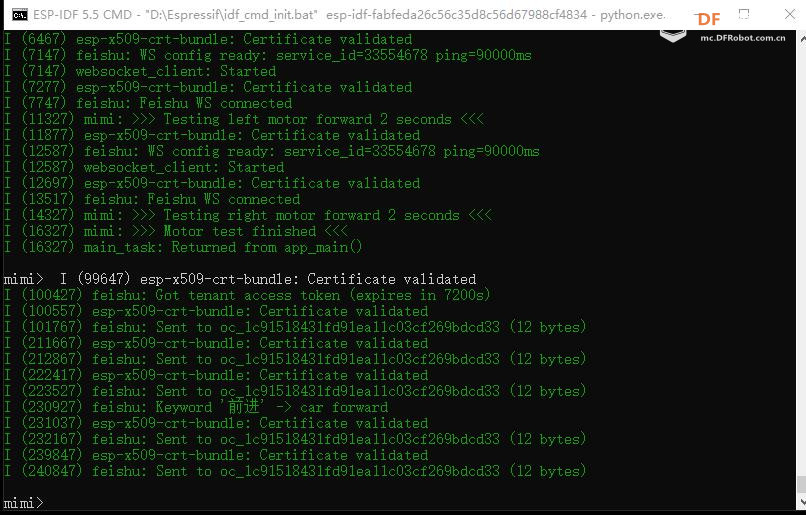
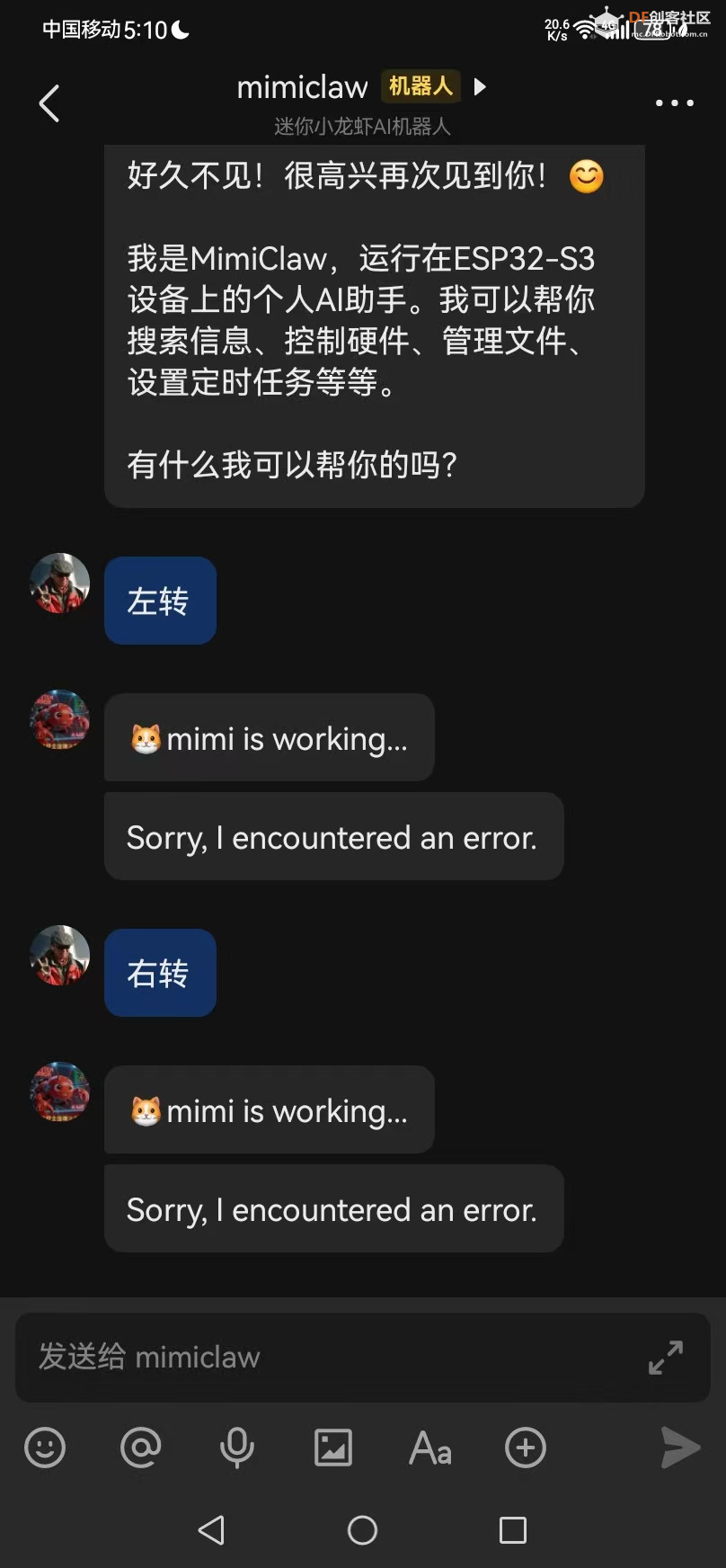
## 四、启动验证(快速判断部署是否成功) 烧录完成后,开发板自动重启,打开串口监视器(波特率 115200),若出现以下日志,即说明基础部署成功: 测试验证:在飞书中给机器人发送“你好”,若 LLM 网络正常,机器人会回复消息;若出现 LLM 调用失败(如 TLS 证书错误),可直接跳过,进入二次开发的关键词控制环节,不影响小车核心控制功能。 |
|
## 五、二次开发:电机差速控制(绕过 LLM 网络难题,稳定可控) 由于 DeepSeek API 可能存在 TLS 证书、网络限制等问题,容易导致 LLM 调用失败,因此我们直接在飞书消息处理逻辑中添加关键词匹配,绕开 LLM 网络调用(后续直接调用),实现小车即时控制,稳定可靠且响应迅速。 1. 添加电机驱动文件 在项目 main/tools 目录下新建 tool_motor.c 和 tool_motor.h 文件,实现电机驱动核心函数(标准 MX1508/L9110S 驱动实现,关键函数为 car_diff_control(action),用于小车差速控制),核心逻辑如下: |
|
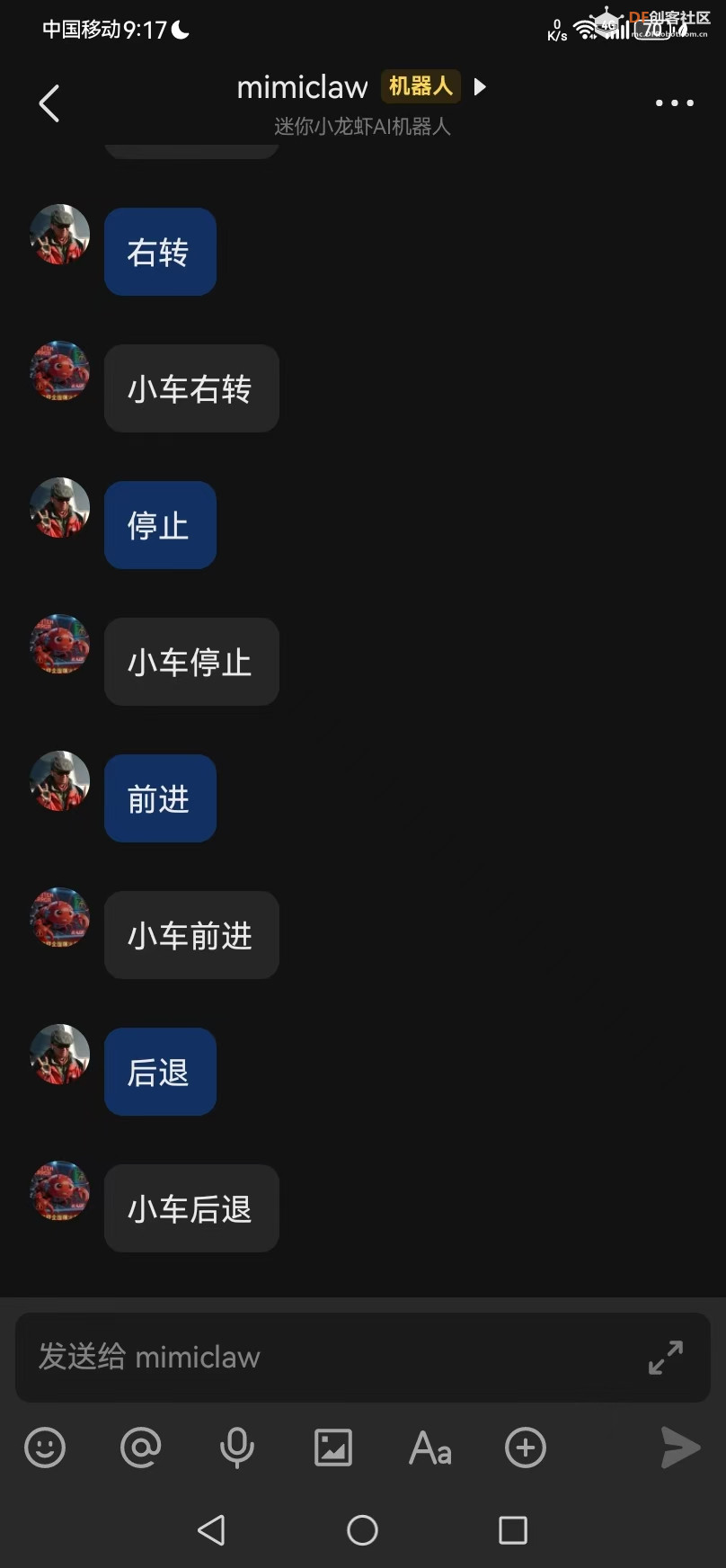
本帖最后由 驴友花雕 于 2026-4-17 06:47 编辑 2. 修改 feishu_bot.c,实现关键词控制 找到 main/channels/feishu/feishu_bot.c 文件,在 handle_message_event 函数中,解析出用户消息(cleaned 变量)后,添加以下关键词匹配逻辑,实现小车前进、后退、左转、右转、停止的精准控制: 3. 重新编译烧录 # 重新编译并烧录,应用修改 4. 测试验证 在飞书中给机器人发送关键词:“前进”“后退”“左转”“右转”“停止”,小车会立即执行对应动作,同时飞书会收到“小车XX”的反馈消息,全程无需依赖 LLM 网络调用,响应迅速、稳定可靠。 |
|
本帖最后由 驴友花雕 于 2026-4-17 06:53 编辑 ## 六、常见问题与解决方案(实战避坑,快速排错) 1、烧录卡在“waiting for download”:核心原因是未手动进入下载模式。解决方案:严格按照“按住 BOOT → 按 RST → 松 RST → 松 BOOT”步骤操作,重新执行烧录命令即可。 2、飞书无响应,无法接收消息:核心原因是飞书凭证错误或未订阅对应事件。解决方案:检查飞书 AppID/Secret 填写正确,在飞书开放平台开启「im.message.receive_v1」事件订阅,重启设备后重试。 3、电机不转:核心原因是电源不足或 GPIO 冲突。解决方案:使用 5V/2A 外部电源,确保与开发板共地;避开 GPIO19/20 引脚,核对引脚分配是否与本文一致,重新检查电机接线。 4、LLM 调用出现 TLS 错误:核心原因是系统时间不准或证书问题。解决方案:添加 SNTP 时间同步,或直接使用本文二次开发中的关键词控制方法,绕开 LLM 调用,不影响小车控制功能。 5、运行时堆栈溢出:核心原因是 outbound 任务栈不足。解决方案:在 mimi_config.h 中增大 MIMI_OUTBOUND_STACK 至 16KB,具体修改为 #define MIMI_OUTBOUND_STACK 16384。 6、克隆 ESP-IDF 仓库提示“网页解析失败”:核心原因是 Gitee 镜像访问异常,实测https://gitee.com/espressif/esp-idf.git、https://gitee.com/mirrors/esp-idf.git 两个链接,以及带“cd ”后缀的该类链接,均会触发此报错。解决方案:一是更换 Gitee 镜像地址,执行命令 git clone -b v5.5.3 https://gitee.com/mirrors/esp-idf.git;二是直接下载 ESP-IDF v5.5.3 压缩包解压,无需克隆;三是更换网络(如手机热点),避开网络限制后重试。 7、克隆 MimiClaw 仓库提示“网页解析失败”:核心原因是仓库链接访问异常,实测有时报错。解决方案:一是确保克隆命令为 git clone https://github.com/memovai/mimiclaw.git ;二是更换网络重试,或直接下载仓库压缩包解压;三是国内用户可搜索 MimiClaw 国内镜像仓库克隆。 8、LLM/DeepSeek调用失败:核心原因是 API Key 错误、过期,模型配置错误或网络受限。解决方案:重新获取 DeepSeek API Key,核对填写无遗漏、无多余空格;确认 MODEL 和 MODEL_PROVIDER 为本文指定的固定值;检查 WiFi 联网正常,必要时填写代理配置。 9、博查(Tavily)API调用失败:核心原因是 API Key 错误、格式不符、额度不足或网络异常。解决方案:确认 Key 以 tvly-开头、无字符遗漏、无多余空格;检查 WiFi 联网正常,核对额度(免费 1000 次/月);额度不足可等待下月重置,或按需升级密钥。 |
|
## 七、总结 本文详细记录了 ESP32-S3 N16R8 开发板部署 MimiClaw 的完整流程,从硬件选型、环境搭建、源码配置,到编译烧录、启动验证,再到二次开发实现飞书关键词控制小车,全程贴合实战,规避了所有常见部署坑;同时结合实测报错文档,精准补充了所有网页解析失败相关的报错场景、原因及解决方案,彻底解决克隆仓库时的核心障碍。通过关键词控制绕开 LLM 网络难题(这个以后再逐一解决),实现了小车稳定可控,无需复杂的网络配置,新手也能轻松上手。 后续可根据需求扩展功能,如实现四电机的麦克纳姆轮小车、添加 PWM 电机调速、超声波避障、WS2812 灯带状态指示、舵机转向控制等。多参考 https://github.com/memovai/mimiclaw 核心源代码,该仓库包含完整的部署脚本、配置模板及功能拓展代码,若该仓库链接解析失败,可参考本文常见问题解决方案处理,欢迎 fork 和 star,如有部署问题,可在评论区留言交流。 ## 附录:二次开发项目结构(关键文件说明) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶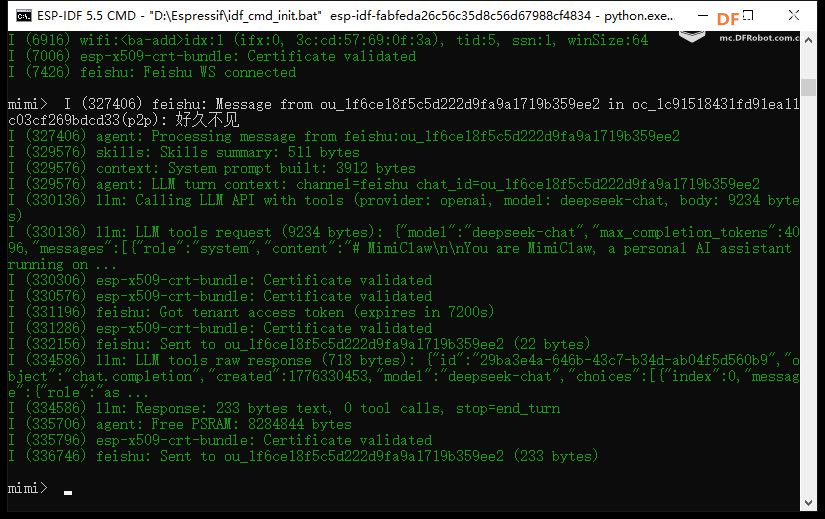

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






