|
783| 10
|
[ESP8266/ESP32] 【花雕】MimiClaw ESP32-S3 接入飞书控制板载 RGB 全彩灯效 |
|
原标题 《【花雕动手做】嵌入式 AI Agent 实战:MimiClaw ESP32-S3 接入飞书,远程控制板载 RGB 全彩灯效》 ——从源码修改到飞书指令,手把手打造一个能“听懂颜色话”的嵌入式 AI 智能体 一、引言:当“养龙虾”热潮遇到嵌入式 AI 2026 年开春,一只名为 OpenClaw(俗称“龙虾”)的开源 AI 智能体以燎原之势席卷国内互联网。它并非传统意义上的聊天机器人,而是一套能真正“动手干活”的本地 AI Agent 框架——可读写文件、收发邮件、调用浏览器,被众多技术爱好者誉为“一人公司的财富密码”。 MimiClaw(迷你小龙虾)正是这场“养虾”热潮中极具特色的分支:它将 OpenClaw 的核心 AI Agent 架构,用纯 C 语言完整移植到 ESP32-S3 微控制器上。这意味着,你只需花费约 30 元购置一块开发板,插上 USB 供电,就能拥有一个随时在线、可对话、能记事,还能操控硬件的本地 AI 助理。 这里将从零到一,完整记录如何将 MimiClaw 接入飞书,并通过飞书自然语言指令远程控制板载 WS2812 RGB 彩灯。全文基于真实开发日志整理,所有代码可直接复刻,适合嵌入式 AI 爱好者、创客及物联网开发者参考学习,快速上手嵌入式 AI Agent 开发。  |
|
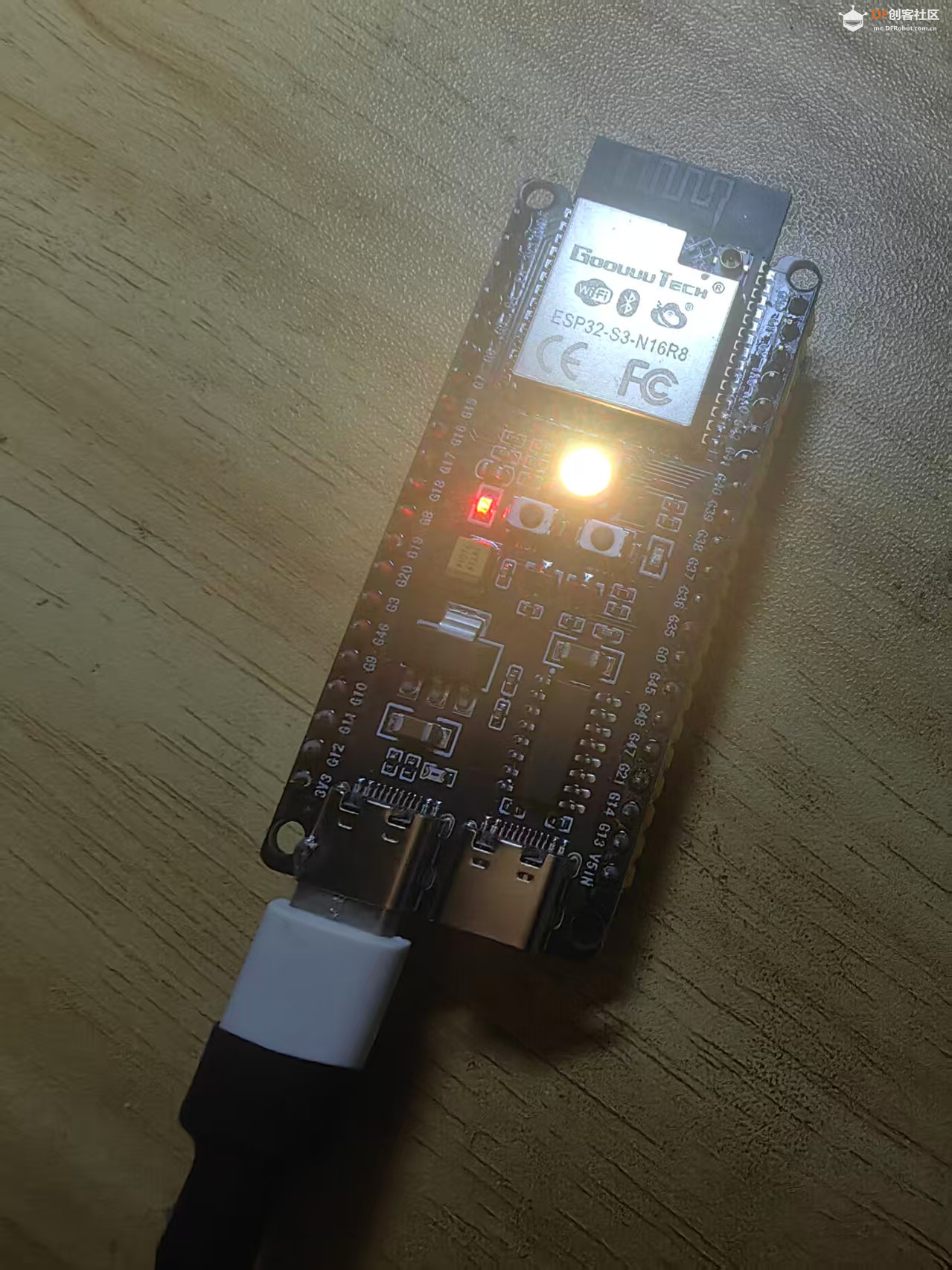
二、MimiClaw 项目简介 MimiClaw 是一款专为 ESP32-S3 设计的轻量级 AI 代理框架,兼顾性能与易用性,核心特点如下: - 纯 C 语言实现:基于 ESP-IDF 5.5 开发,无 Linux、Node.js 依赖,MCU 工程师可快速上手,贴合嵌入式开发习惯。 - 双核协同架构:ESP32-S3 双核分工明确,Core 0 专门负责网络 I/O 交互,Core 1 专注运行 AI 推理,通过 FreeRTOS 任务调度实现软实时响应,兼顾流畅度与稳定性。 - 本地记忆持久化:对话历史、用户偏好等数据自动写入 Flash(对应 SOUL.md、USER.md、MEMORY.md 文件),断电重启后记忆不丢失,实现“持续学习”的体验。 - 多 LLM 灵活切换:支持 Anthropic Claude、OpenAI、DeepSeek 等主流大语言模型,可根据需求切换,适配不同场景的推理需求。 - 灵活的工具调用系统:内置网页搜索、定时任务、GPIO 控制等基础工具,开发者只需添加几行 C 代码,即可扩展自定义工具,实现更多硬件操控或功能扩展。 硬件适配方面,MimiClaw 要求 ESP32-S3 开发板具备 16MB Flash 和 8MB PSRAM,市面上常见的 LILYGO T7-S3、FireBeetle 2、Seeed XIAO ESP32S3 Plus 等型号均可兼容。本文采用国产 ESP32-S3 核心板,板载 WS2812 彩灯默认连接至 GPIO 48 引脚,无需额外接线即可直接使用。 |
|
三、硬件与环境准备 1、硬件清单 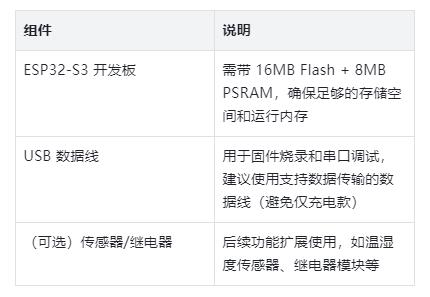 注意:本文无需额外外接 LED 灯,开发板板载的 WS2812 彩灯可直接用于测试和使用。 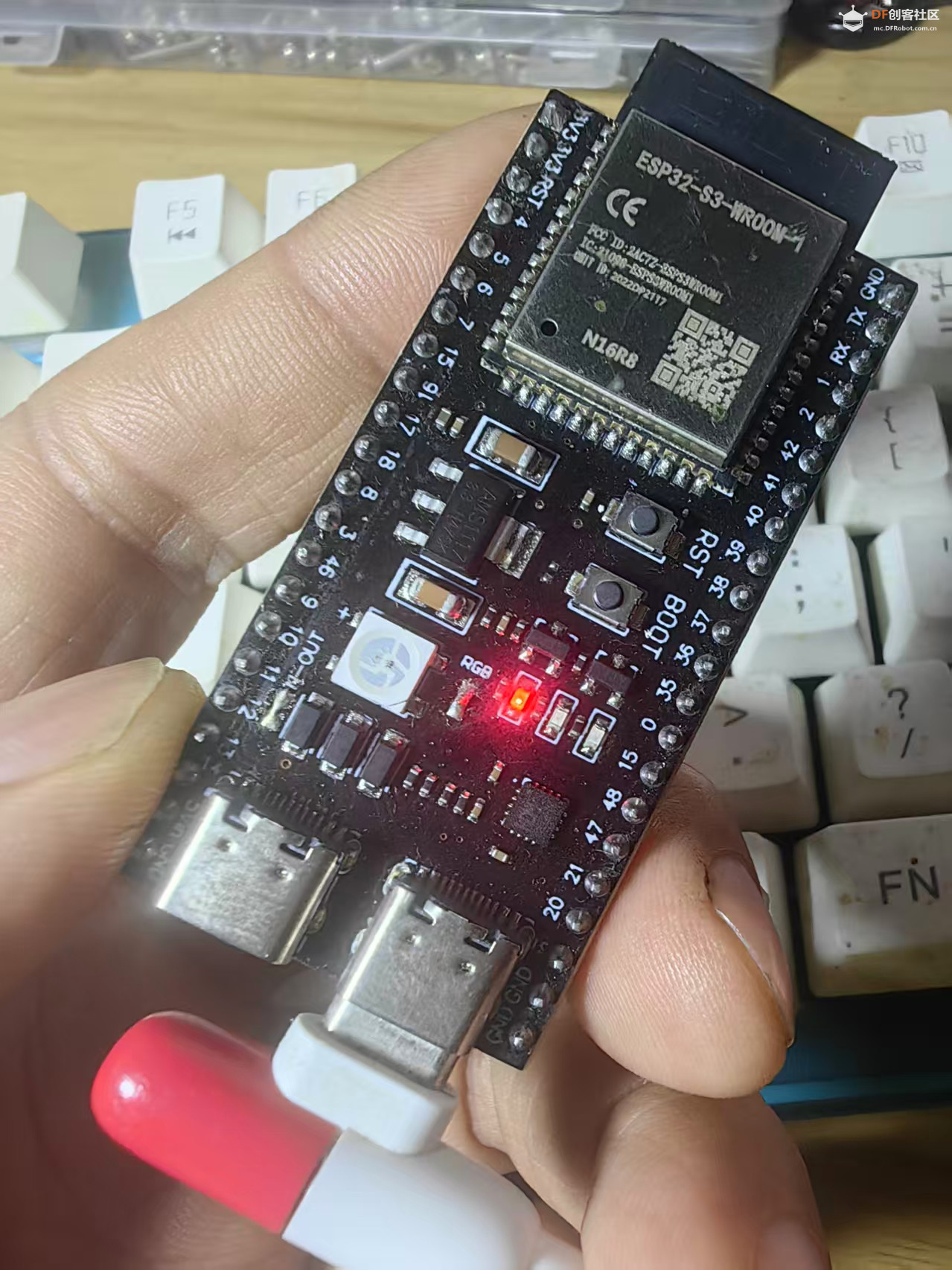 2、开发环境搭建 开发环境核心为 ESP-IDF 框架,具体搭建步骤如下: (1)安装 ESP-IDF v5.5 或更高版本,确保框架支持 ESP32-S3 芯片(安装教程可参考 ESP 官方文档,Windows、macOS、Linux 系统均支持)。 (2)克隆 MimiClaw 源码到本地,打开终端执行以下命令: git clone https://github.com/memovai/mimiclaw.git cd mimiclaw (3)设置开发目标芯片为 ESP32-S3,终端执行:idf.py set-target esp32s3 环境搭建完成后,可通过 idf.py --version 命令验证 ESP-IDF 版本,确保环境正常。 3、飞书机器人创建与配置 MimiClaw 通过飞书机器人接收指令、反馈结果,需先在飞书开放平台创建企业自建应用并完成配置,全程无需公网 IP,操作如下: (1)创建企业自建应用 a 访问 飞书开放平台,使用飞书账号登录(个人账号即可,无需企业认证)。 b 点击页面右上角“创建企业自建应用”,填写应用名称(如“MimiClaw RGB Controller”),选择应用类型为“工具类”,点击“创建”。 c 进入应用管理页面后,在左侧菜单「凭证与基础信息」中,复制「App ID」(格式为 cli_xxx)和「App Secret」,妥善保存(后续配置 MimiClaw 需用到)。 (2)添加机器人能力并配置权限 a 在应用管理左侧菜单,点击「添加应用能力」,在弹出的列表中找到「机器人」,点击「配置」,启用机器人能力。 b 启用后,进入「权限管理」页面,搜索并添加以下 4 个核心权限(缺一不可): - im:message:允许机器人发送消息 - im:message.p2p_msg:readonly:允许机器人接收私聊消息 - im:message:send_as_bot:允许机器人以自身身份回复消息 - contact:user.base:readonly:允许机器人读取用户基础信息 c 添加完成后,点击「权限管理」页面的「申请开通」,无需审核,立即生效。 (3)配置事件订阅(长连接模式) 为让嵌入式设备(ESP32-S3)能稳定接收飞书消息,采用长连接(WebSocket)模式订阅事件,无需公网 IP,配置步骤如下: a 在应用管理左侧菜单,点击「事件与回调」。 b 订阅方式选择「使用长连接接收事件」,点击「保存」(无需填写回调地址)。 c 点击「添加事件」,在搜索框中输入「im.message.receive_v1」,勾选该事件(接收消息事件),点击「确认添加」,完成事件订阅。 长连接模式通过 WebSocket 全双工通道接收飞书回调,延迟低、稳定性高,非常适合嵌入式设备的网络场景。 (4)发布应用并添加机器人 a 在应用管理左侧菜单,点击「版本管理与发布」,点击「创建版本」,填写版本号(如 1.0.0),简要填写更新说明(如“初始版本,支持 RGB 彩灯控制”),提交审核。 b 个人账号创建的应用无需人工审核,提交后立即发布成功。 c 打开飞书客户端,在搜索框中输入创建的机器人名称,找到对应机器人后,点击「添加到聊天」,完成机器人添加。 d MimiClaw 源码修改:添加 WS2812 控制工具 |
|
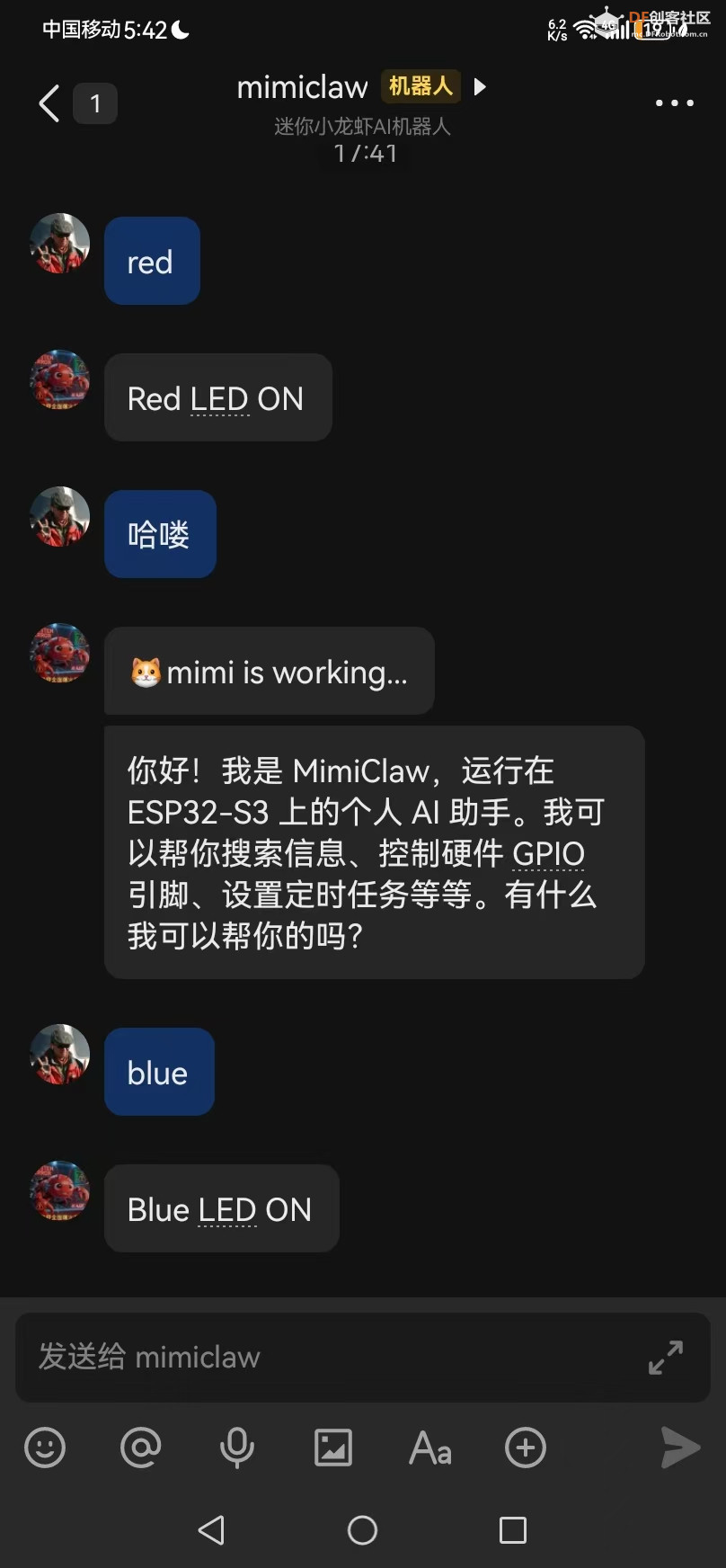
4、MimiClaw 自带工具调用系统,我们只需在源码中添加 WS2812 彩灯驱动、注册颜色控制工具,并优化 LLM 指令识别逻辑,即可实现飞书指令控制彩灯。核心修改文件为 tools/tool_registry.c 和 agent_loop.c。 (1)在 tool_registry.c 中添加 WS2812 驱动与颜色工具 打开 tools/tool_registry.c 文件,在文件顶部添加 WS2812 驱动相关代码(使用 ESP-IDF 官方 led_strip 组件,无需手动编写时序,稳定可靠): (2)注册颜色控制工具 在 tool_registry.c 文件的 tool_registry_init 函数中,添加颜色工具的注册代码(与其他工具注册逻辑一致),确保 MimiClaw 能识别并调用这些工具: (3)优化 LLM 指令识别:预处理绕过 LLM 直接匹配颜色词 实测发现,DeepSeek 等 LLM 对 red、green、blue 等简单颜色词的识别并不稳定——有时 red 能正确触发工具调用,green 却被当作普通对话处理,导致彩灯无响应。为解决这一问题,我们在 LLM 调用前增加一层预处理逻辑:精确匹配用户消息中的颜色词,直接调用对应工具并回复,完全跳过 LLM,实现毫秒级响应。 打开 agent_loop.c 文件,添加预处理函数,并在消息处理逻辑中调用: 核心价值:通过预处理逻辑,red、green、blue、yellow、off 五个基础颜色指令实现毫秒级响应,且完全不受 LLM 状态影响;其他复杂对话(如“亮一盏暖一点的灯”)仍走 LLM 流程,实现“快速指令 + 智能对话”的分层设计,兼顾效率与灵活性。 |
|
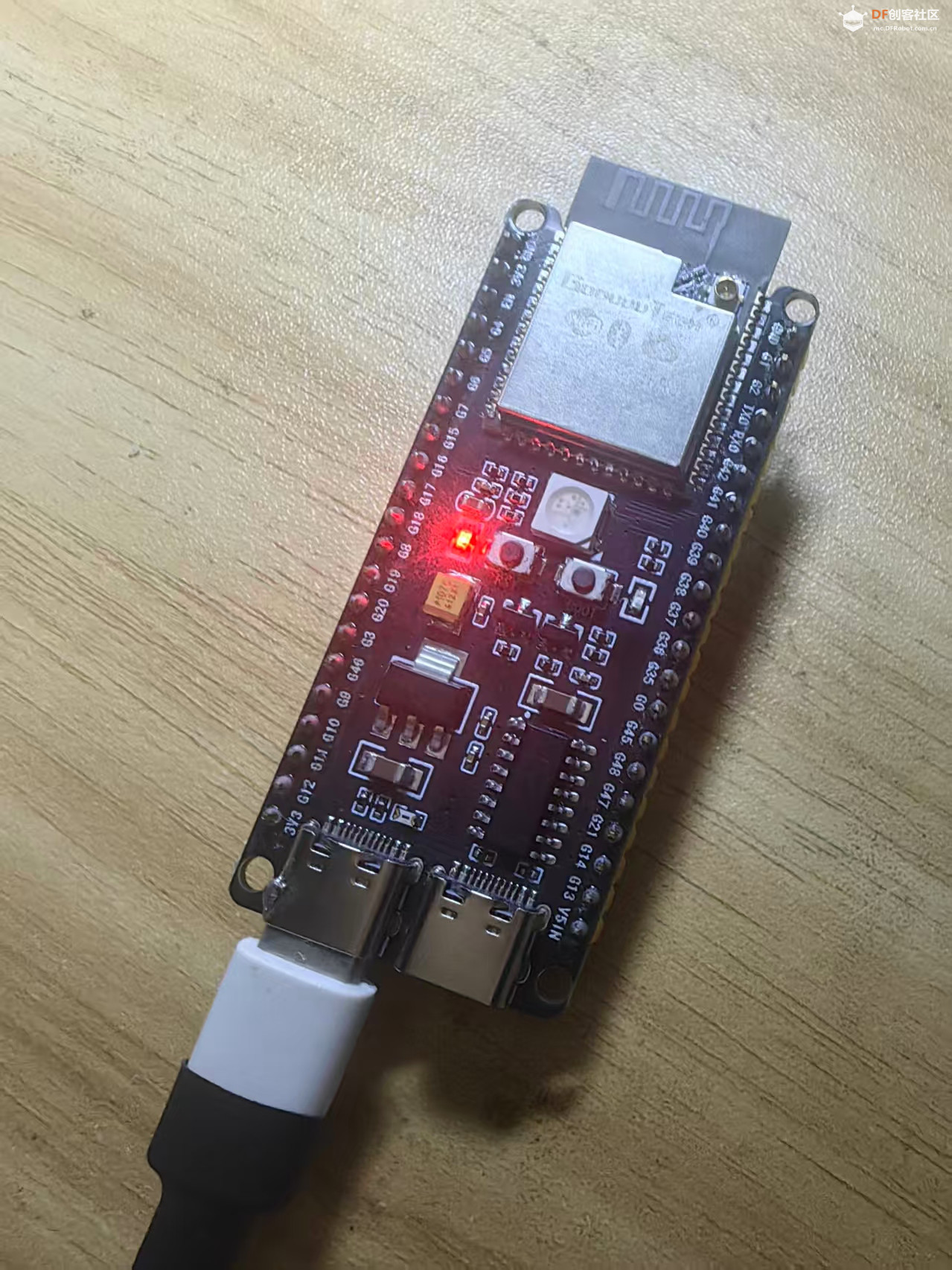
5、编译烧录与串口配置 (1)编译烧录固件 源码修改完成后,执行以下mimi>命令编译、烧录固件(确保开发板通过 USB 连接电脑): 串口号查询方法:Windows 系统可通过“设备管理器”查看“端口(COM 和 LPT)”,macOS 系统可通过 ls /dev/tty.usb* 命令查询,Linux 系统可通过 ls /dev/ttyUSB* 查询。 (2)串口终端选择与参数配置 MimiClaw 的 CLI(命令行界面)需要支持 ANSI 转义序列,才能正常使用行编辑、Tab 补全、颜色显示等功能,推荐使用以下终端工具: - Windows:Windows Terminal(推荐)、PuTTY - macOS/Linux:系统自带终端、iTerm2 避免使用 IDE 自带的简易串口监视器(如 VS Code 串口插件),可能导致 CLI 显示异常。 串口参数固定如下,无需修改: 波特率:115200,数据位:8,停止位:1,校验位:无,流控:无。 (3)烧录后基础配置 固件烧录完成后,开发板会自动重启,此时需通过串口配置 WiFi、LLM 密钥和飞书凭证,让 MimiClaw 正常联网并接入飞书,步骤如下(在串口终端中输入命令): 重启后,串口终端会显示“Feishu connected”,说明飞书机器人连接成功;显示“WiFi connected, IP: xxx.xxx.xxx.xxx”,说明网络连接正常。 |
|
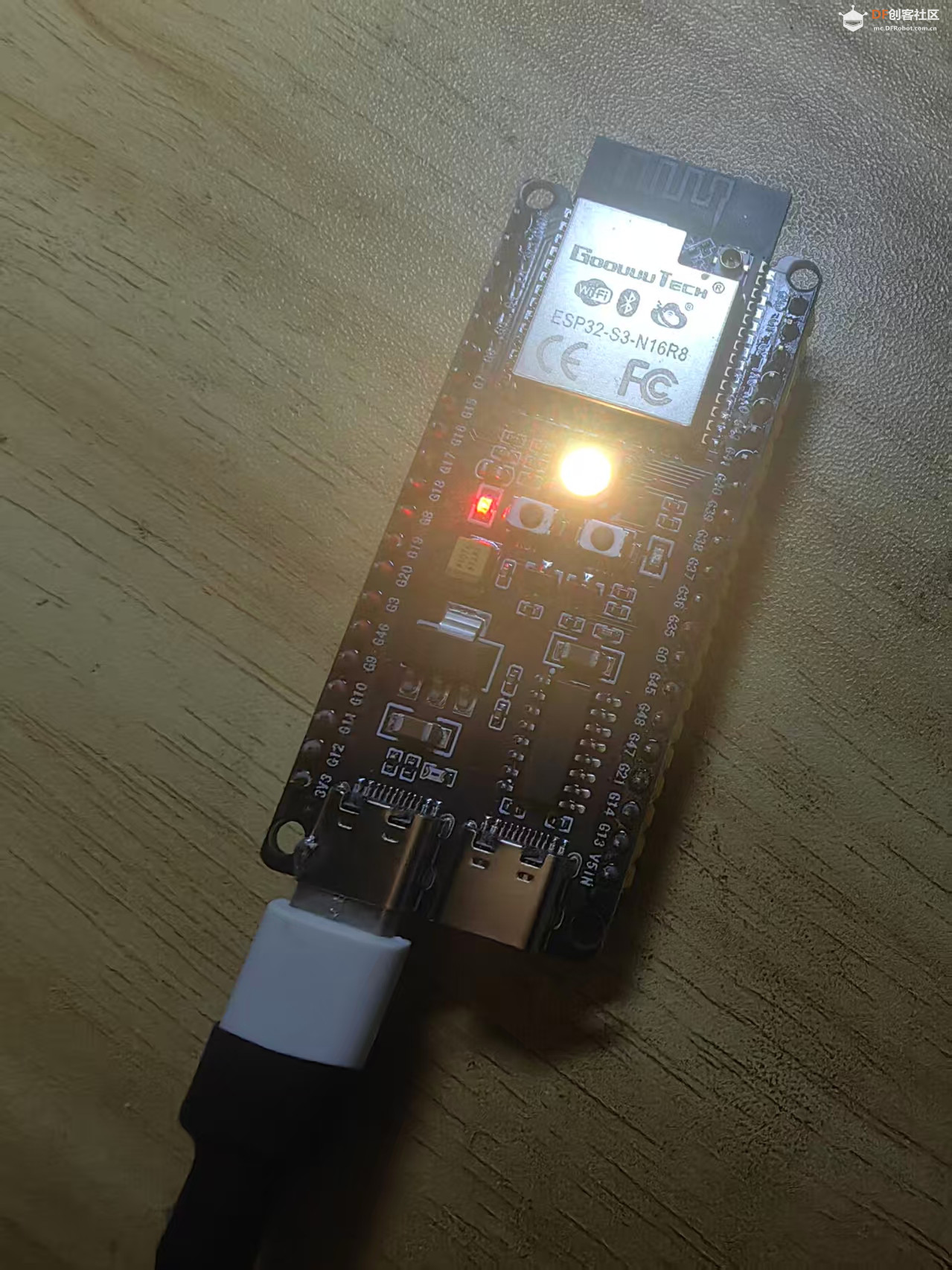
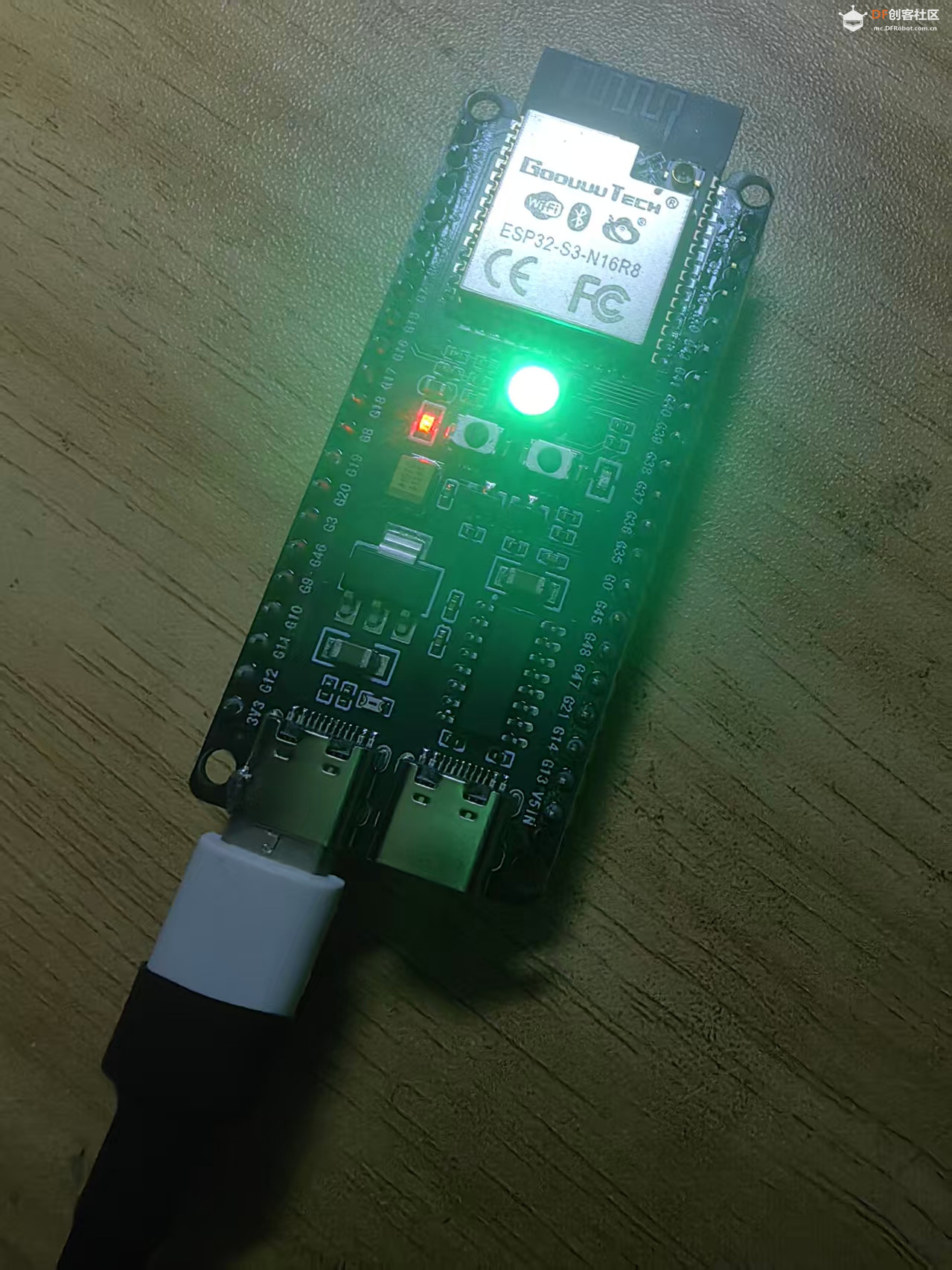
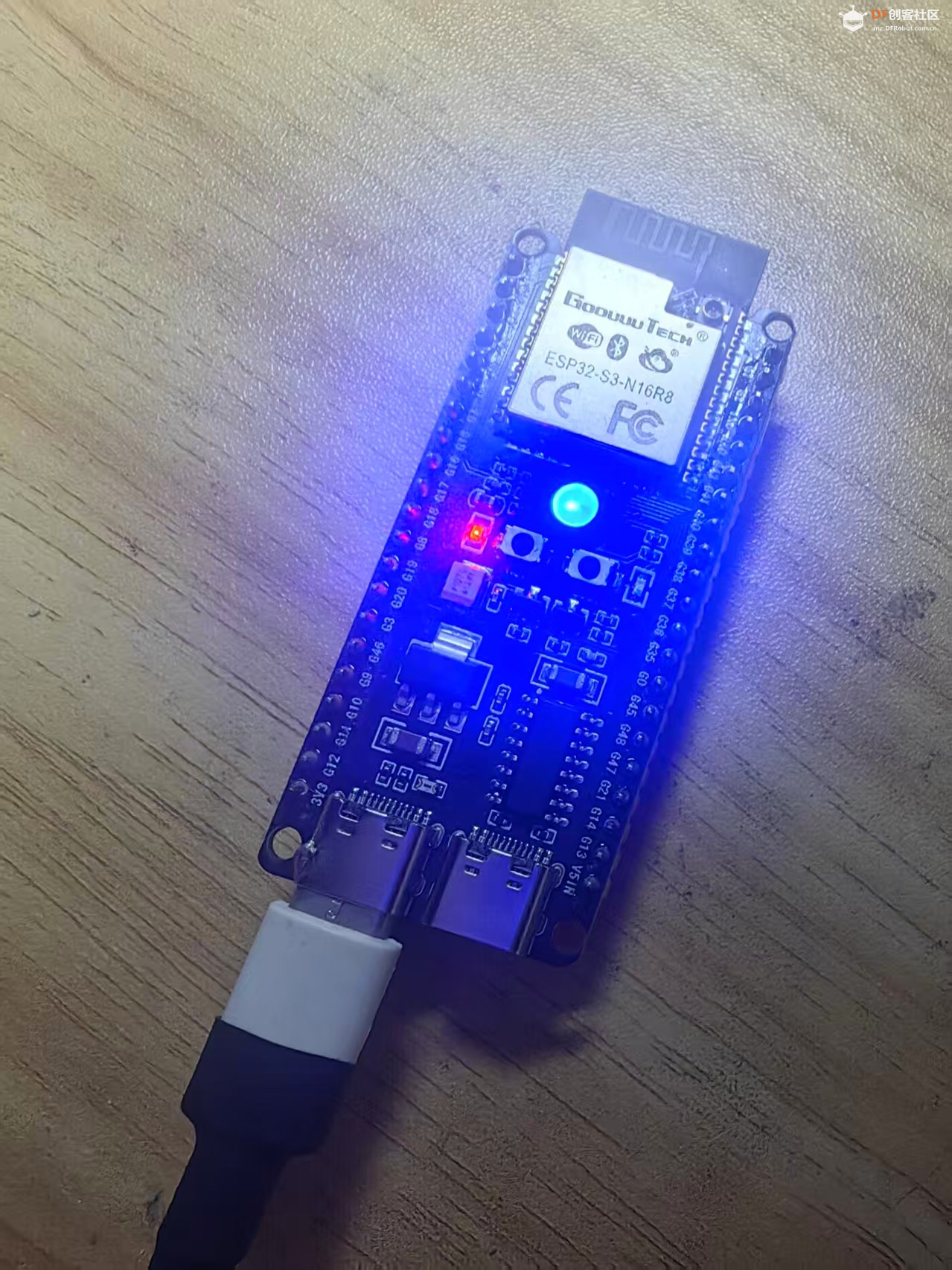
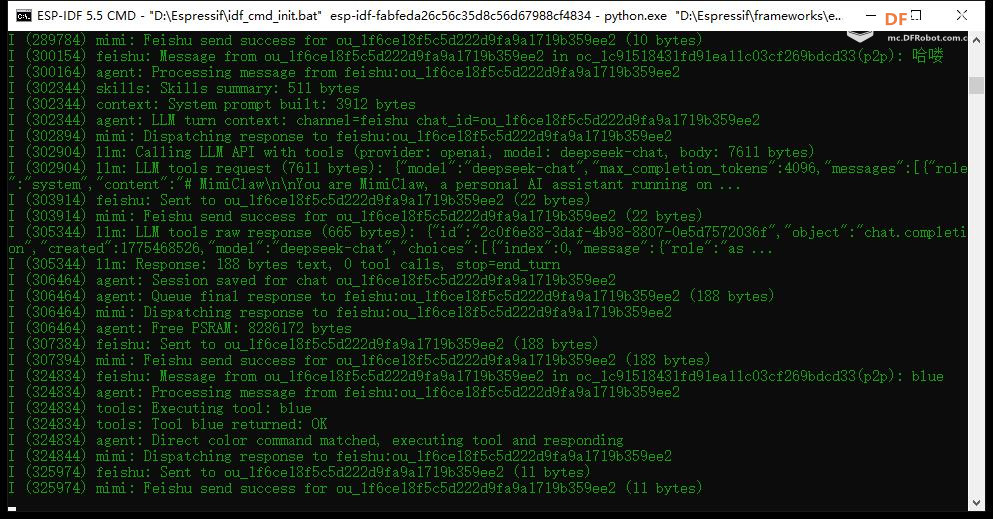
本帖最后由 驴友花雕 于 2026-4-6 17:25 编辑 6、测试与效果验证 配置完成后,即可在飞书中发送颜色指令,测试彩灯控制效果。以下为详细测试用例,结合串口日志验证执行结果: (1)测试用例与预期效果  (2)实际运行日志示例 以下为飞书发送“red”指令后的完整串口日志,可清晰看到指令执行链路: 日志解析:飞书接收消息 → Agent 处理消息 → 预处理匹配颜色词 → 执行 red 工具 → 初始化 WS2812 → 工具执行成功 → 飞书回复结果。整个流程延迟 < 0.5 秒,稳定可靠。 |
|
8、关键技术要点总结 - WS2812 驱动优化:采用 ESP-IDF 官方 led_strip 组件,基于 RMT 外设驱动,无需手写复杂时序,只需配置 GPIO 引脚和灯珠参数,即可实现稳定控制,降低开发难度。 - 飞书长连接优势:嵌入式设备无需公网 IP,通过 WebSocket 长连接接收飞书消息,延迟低、稳定性高,适合个人开发和内网部署,无需额外配置服务器。 - 预处理绕过 LLM 创新点:针对固定颜色指令,在 LLM 调用前增加精确匹配逻辑,彻底解决模型对简单词汇识别不一致的问题,实现毫秒级响应,同时不影响复杂对话的智能性。 - 工具注册机制:MimiClaw 通过 tool_registry 统一管理所有工具,新增硬件控制功能时,只需在 tool_registry.c 中注册工具和执行函数,无需修改核心 Agent 逻辑,扩展性极强。 9、 扩展方向 本文实现了基础的颜色控制功能,基于此可扩展更多实用功能,丰富嵌入式 AI Agent 的应用场景: (1)增加更多颜色选项:在 tool_registry.c 中添加 purple(紫色)、cyan(青色)、white(白色)等颜色工具,并在预处理函数中增加对应匹配,支持更多灯效。 (2)支持亮度调节:扩展 set_rgb 工具,接收亮度参数(0-255),让 LLM 解析“亮一点”“暗一点”等模糊指令,实现更细腻的灯效控制。 (3)接入传感器联动:添加温湿度传感器(如 DHT11)、光照传感器,让 MimiClaw 自动根据环境条件改变灯色(如高温亮红灯、低光照亮暖黄灯)。 (4)定时任务控制:通过飞书发送“每天 19:00 亮暖黄灯”“每天 23:00 关灯”等指令,调用 MimiClaw 内置的 cron_add 工具,实现定时控制。 (5)多灯组控制:修改 WS2812 驱动的 max_leds 参数,接入 LED 灯带,实现多灯珠级联控制,支持流水灯、呼吸灯等复杂灯效。 10、结语 本文完整记录了从 MimiClaw 基础部署、飞书机器人配置,到源码修改、固件烧录,再到飞书远程控制 WS2812 彩灯的全过程,重点解决了 LLM 对颜色指令识别不稳定的核心问题,通过预处理匹配方案,实现了“毫秒级固定指令 + 智能复杂对话”的分层架构。 在“养龙虾”热潮下,嵌入式 AI Agent 正从极客玩具走向真正的实用工具——它无需强大的硬件支撑,只需一块廉价的 ESP32-S3 开发板,就能实现“语音/文字指令 → 硬件响应”的完整闭环。 如果你也想拥有一块能听懂颜色指令、能互动、能干活的嵌入式 AI 助理,不妨从本文开始动手实践,逐步探索嵌入式 AI Agent 的更多可能性。 项目源码:MimiClaw GitHub(https://github.com/memovai/mimiclaw.git)  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶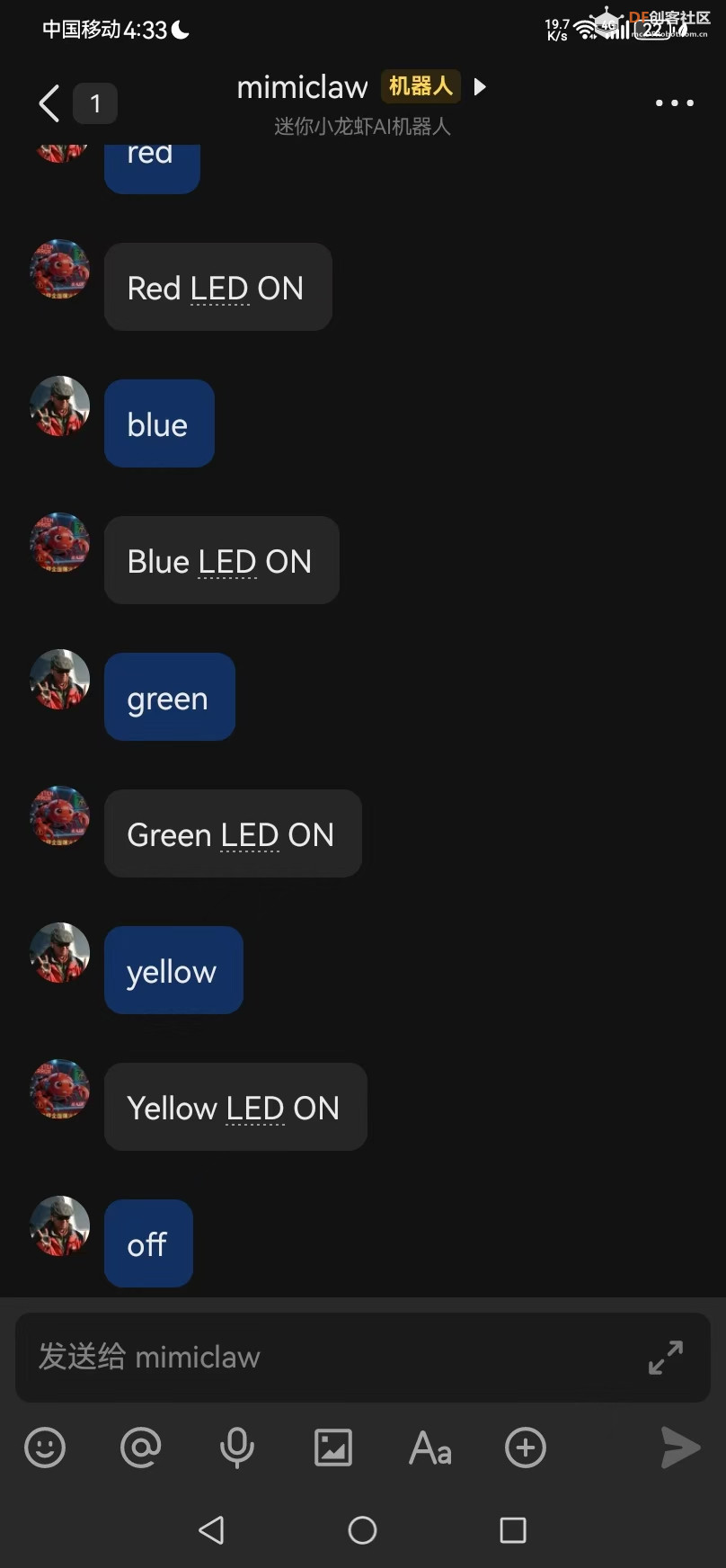


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






