|
863| 10
|
[ESP8266/ESP32] 【花雕动手做】ESP32-S3 + MimiClaw 实战:飞书控制 SG90 舵机 |
|
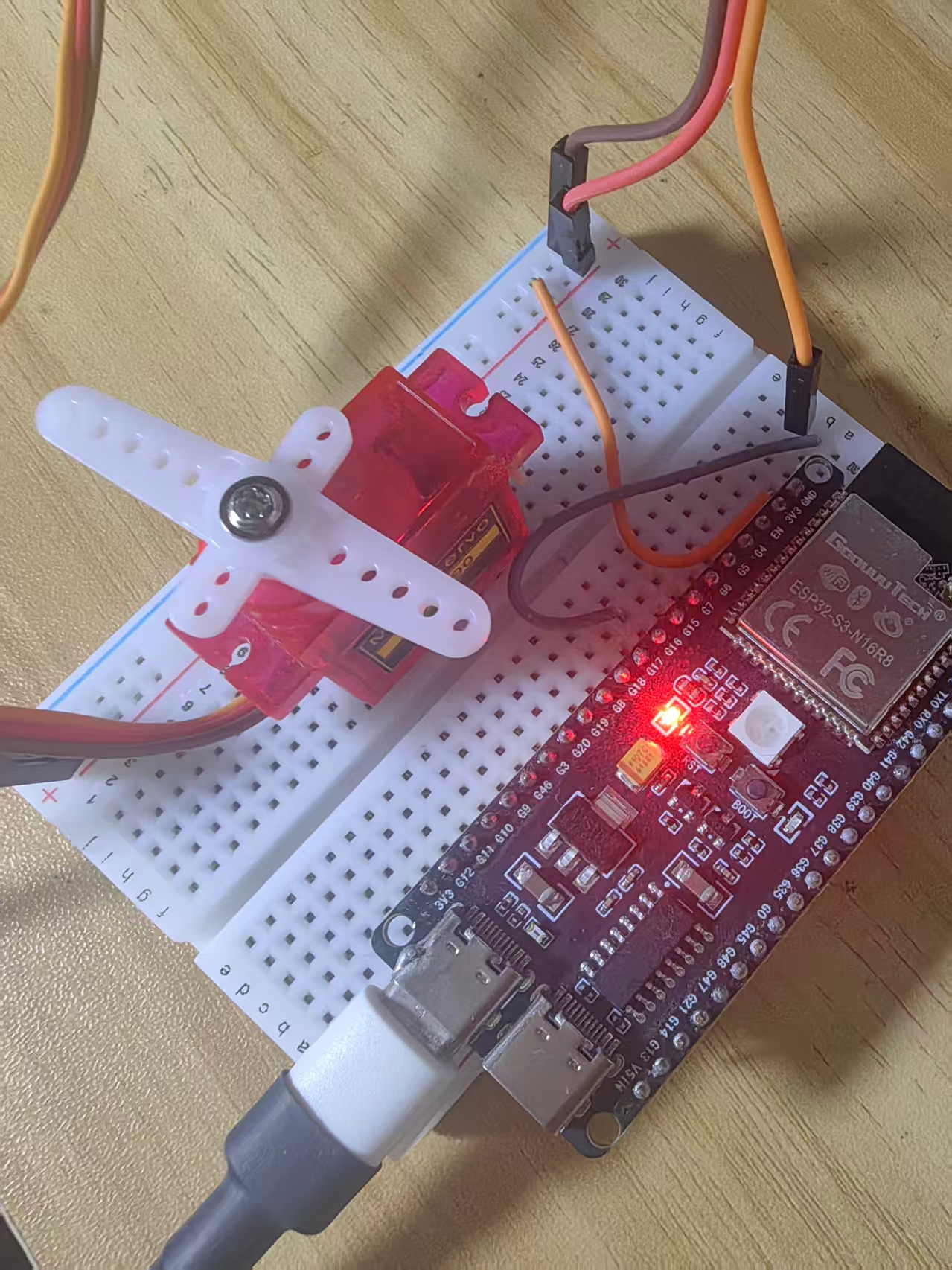
原标题 【花雕动手做】从零实现飞书 AI 控舵机:ESP32-S3 的 MimiClaw 嵌入式实践 ——从“会发光”到“会动”,让你的嵌入式 AI Agent 拥有物理交互能力 引言 在上一篇文章中,我们已实现通过飞书发送“红”“绿”“蓝”等指令,控制 ESP32‑S3 板载的 WS2812 RGB LED 切换颜色,并完成了多色呼吸灯效果的开发。但静态灯效始终缺乏“灵性”,若能让 AI Agent 实现物理运动——比如控制舵机旋转,便能解锁自动开门、机械臂抓取、摄像头云台调控等更丰富的物理交互场景。 这里以 SG90 微型舵机为核心,详细讲解如何在 MimiClaw 框架下添加舵机控制工具,通过飞书自然语言指令(如“舵机0”“舵机90”“舵机180”)实现舵机远程精准控制。全文提供完整可运行代码,适配嵌入式 AI 爱好者、物联网开发者学习参考,手把手带你实现从“静态显示”到“动态交互”的突破。  |
|
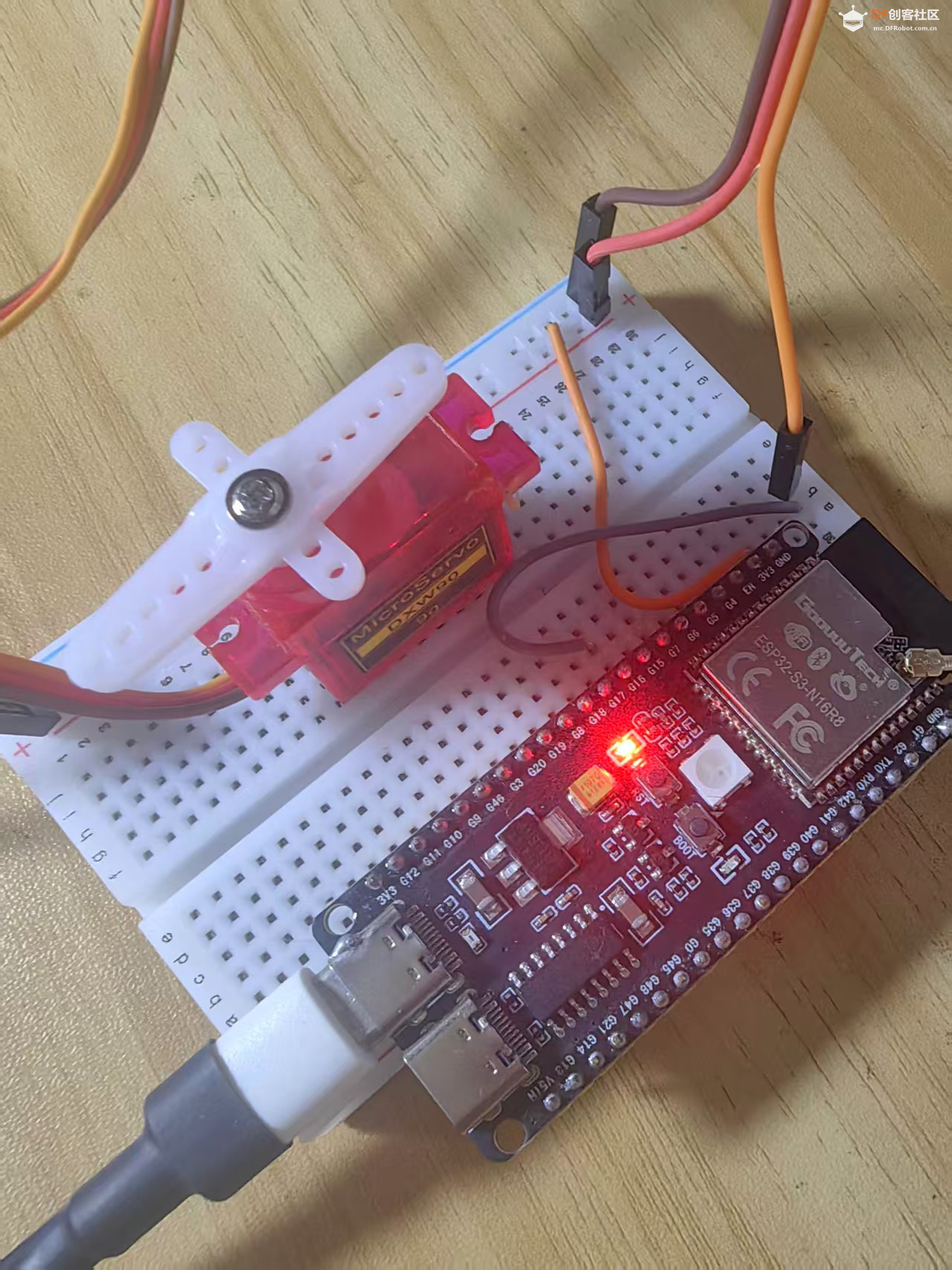
一、舵机控制原理 1.1 SG90 舵机简介 SG90 是一款应用广泛的微型伺服电机,重量仅 9g,扭矩约 1.6kg·cm,凭借小巧的体积和稳定的性能,常被用于机器人关节、智能小车转向、门禁锁控制等场景。它采用三线制接口,各线路功能明确,便于接线操作: - 红色:电源接口,必须接入 5V 电压(不可用 3.3V,否则供电不足) - 棕色/黑色:接地接口(GND),需与开发板共地 - 橙色/黄色:PWM 信号接口,用于接收控制指令 1.2 控制信号原理 SG90 舵机通过 50Hz 的 PWM 信号(周期固定为 20ms)实现角度控制,脉宽(高电平持续时间)与舵机旋转角度存在明确的对应关系,具体如下: - 脉宽 0.5ms → 舵机旋转至 0°(最小角度) - 脉宽 1.5ms → 舵机旋转至 90°(中间角度) - 脉宽 2.5ms → 舵机旋转至 180°(最大角度) ESP32‑S3 内置 LEDC(LED PWM 控制器),可轻松生成 50Hz、14 位精度的 PWM 波形,我们只需将舵机角度换算为对应的占空比,即可实现精准角度控制。 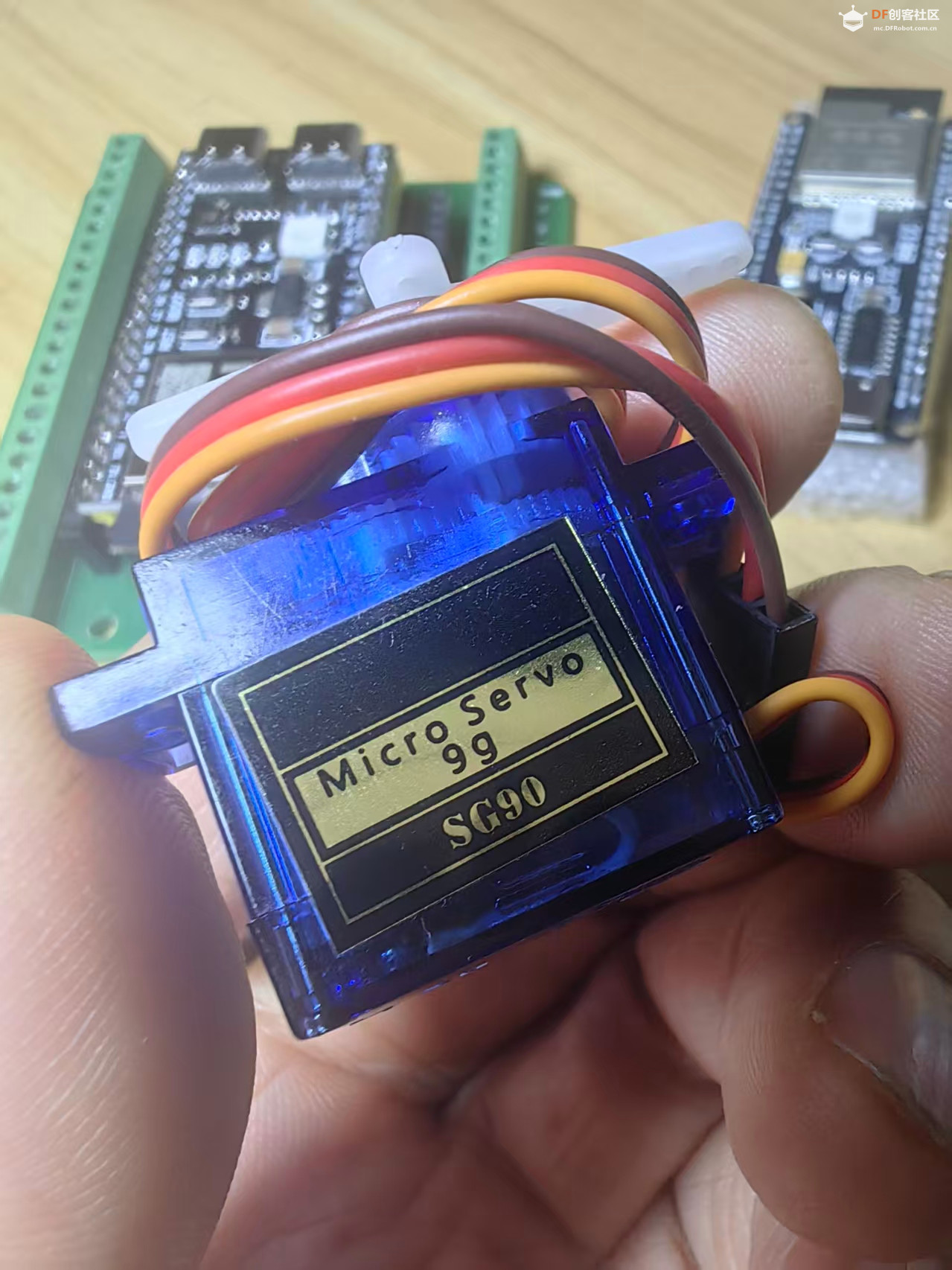  |
|
三、MimiClaw 中添加舵机控制工具 MimiClaw 框架项目结构清晰,添加舵机控制功能只需完成三步:创建舵机驱动文件、注册工具、添加自然语言指令映射。全程基于框架规范开发,无需修改核心代码,便于后续扩展和维护。 3.1 创建头文件 tool_servo.h 在项目 tools/ 目录下新建头文件 tool_servo.h,用于声明舵机初始化、角度控制相关函数,代码如下: |
|
3.2 实现源文件 tool_servo.c 在 tools/ 目录下新建源文件 tool_servo.c,实现头文件中声明的函数,基于 LEDC 控制器完成 PWM 信号生成、角度与占空比换算等核心逻辑,代码如下(含详细注释): |
|
3.3 在 tool_registry.c 中注册工具 工具注册是 MimiClaw 框架调用自定义功能的核心步骤,需在 tool_registry.c 中引入舵机工具头文件,并注册舵机控制工具,具体操作如下: 1. 在 tool_registry.c 顶部添加头文件引入: #include "tool_servo.h" 2. 在 tool_registry_init 函数中添加工具注册代码(与其他工具注册代码放在一起): 注意:需确保 main/CMakeLists.txt 文件的 REQUIRES 字段中包含 esp_driver_ledc,否则编译时会出现“driver/ledc.h: No such file”错误,添加后即可正常编译。 |
|
3.4 在 agent_loop.c 中添加自然语言预处理 为实现飞书自然语言直接控制,需在 agent_loop.c 的 try_direct_command 函数中添加舵机指令匹配逻辑,让框架无需调用 LLM,即可快速响应固定指令。找到 try_direct_command 函数,在函数末尾添加以下代码: 说明:上述代码中固定使用 GPIO 16 作为舵机控制引脚,若实际接线时更换了引脚,只需将代码中的“16”替换为实际使用的引脚号即可。 |
|
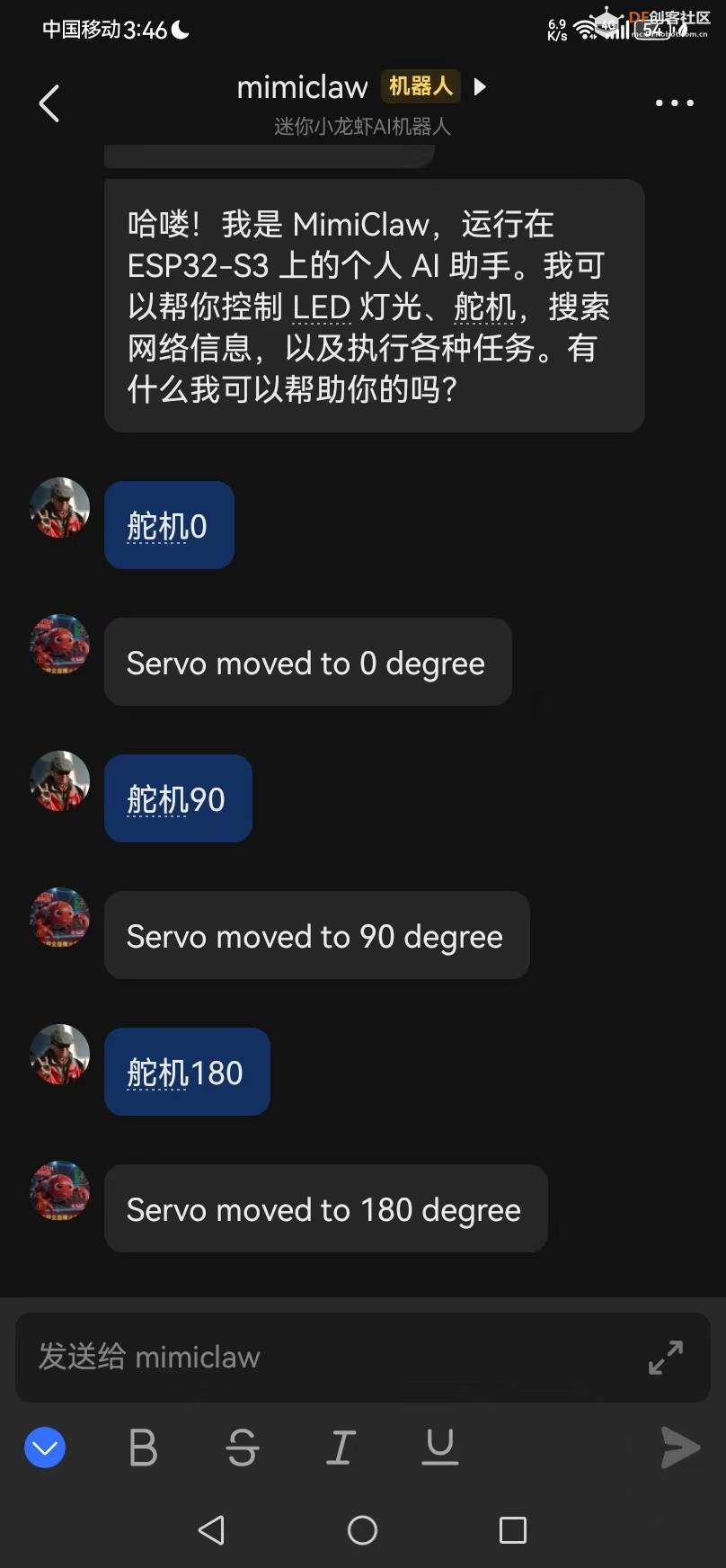
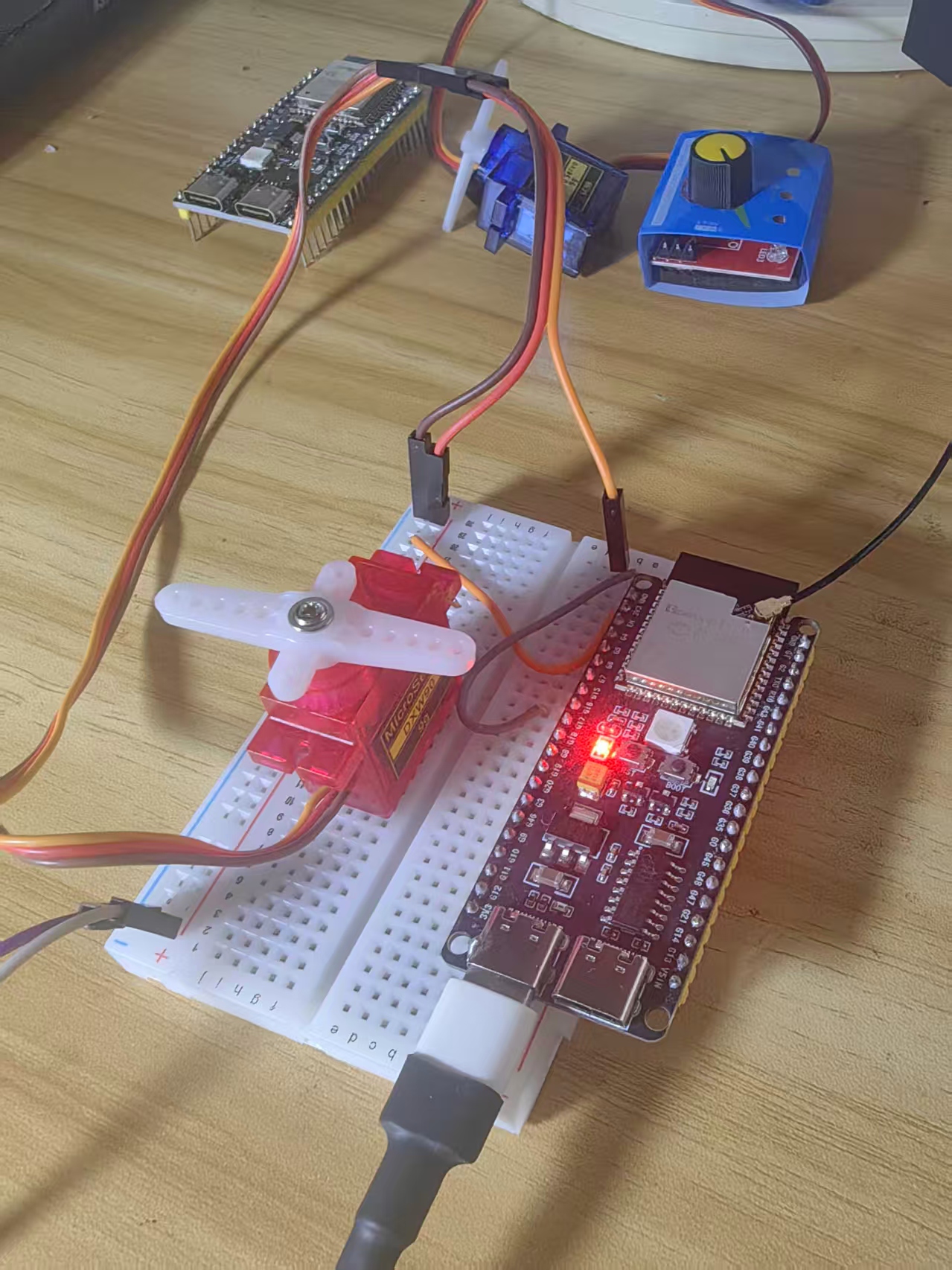
四、编译与测试 完成代码开发后,通过编译烧录、串口测试、飞书测试三个步骤,验证舵机控制功能是否正常,确保每一步都符合预期效果。 4.1 编译烧录 打开终端,进入项目根目录,执行以下命令完成编译、烧录和串口监控(需将 COM12 替换为实际串口号): 4.2 串口手动测试 当串口监控启动后,等待 MimiClaw 框架初始化完成,出现“mimi> ”提示符时,输入以下指令,手动测试舵机控制功能: 输入指令后,观察舵机是否能准确转动到对应角度。若舵机无反应,需优先检查 5V 供电、共地连接和信号线接线是否正确。 4.3 飞书自然语言测试 确保 MimiClaw 机器人已成功连接飞书,在飞书聊天框中向机器人发送以下指令,测试自然语言控制效果: 测试成功后,串口日志会输出类似以下内容,说明指令被预处理直接捕获并执行,响应速度极快(延迟小于 0.5 秒): |
|
八、扩展思路 本文实现的舵机控制功能可灵活扩展,结合 MimiClaw 框架的特性,可实现更丰富的应用场景,以下是几个实用的扩展方向: 1. 多角度预设 在 try_direct_command 函数中添加更多角度指令,如“舵机45”“舵机135”,同时调整 angle_to_duty 函数,支持 0-180° 任意角度的精准控制,满足更多场景需求。 2. 多舵机控制 ESP32‑S3 拥有多组 LEDC 通道,可为每个舵机分配不同的 LEDC 通道和 GPIO 引脚,修改 tool_servo.c 代码,支持通过 JSON 参数指定舵机引脚,实现多舵机同步控制(如机器人多关节联动)。 3. 传感器联动 结合超声波传感器、温湿度传感器等外设,实现智能化控制:例如通过超声波传感器检测距离,自动控制舵机旋转调整摄像头角度;通过温湿度传感器检测环境温度,自动控制舵机驱动开窗器。 4. 定时任务 利用 MimiClaw 框架的 cron_add 工具,设置定时任务,让舵机在固定时间执行指定动作,例如每天固定时间转动舵机,实现自动宠物喂食器、定时开关门等功能。 5. 平滑运动 在 tool_servo_set_angle 函数中添加步进循环逻辑,让舵机从当前角度逐步过渡到目标角度,实现缓动效果,避免角度突变导致的舵机抖动,提升控制体验。 九、总结 本文详细讲解了在 MimiClaw 嵌入式 AI Agent 框架中添加 SG90 舵机控制功能的完整流程,从舵机原理、硬件接线,到代码开发、工具注册、自然语言映射,再到测试与故障排查,全程贴合实战场景,提供可直接运行的代码和清晰的操作步骤。 通过本文的实践,你的 ESP32‑S3 开发板将不再局限于“智能灯泡”的角色,而是升级为能够执行物理动作的 AI 代理。核心实现逻辑可复用至步进电机、继电器、舵机阵列等其他外设,为机器人、智能家居、自动化设备开发提供了清晰的思路和基础。 项目源码基于 MimiClaw 二次开发,欢迎 fork 和贡献。若在实现过程中遇到任何问题,欢迎在评论区留言交流,共同探讨嵌入式 AI 与物联网的实践技巧。 本文为“花雕学编程”、“花雕动手做”系列博客之一,聚焦嵌入式 AI Agent 与物联网的交叉实践,后续将带来更多实战案例,敬请关注。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






