|
28300| 15
|
万圣节新玩具?这货真的吓死宝宝了! |
|
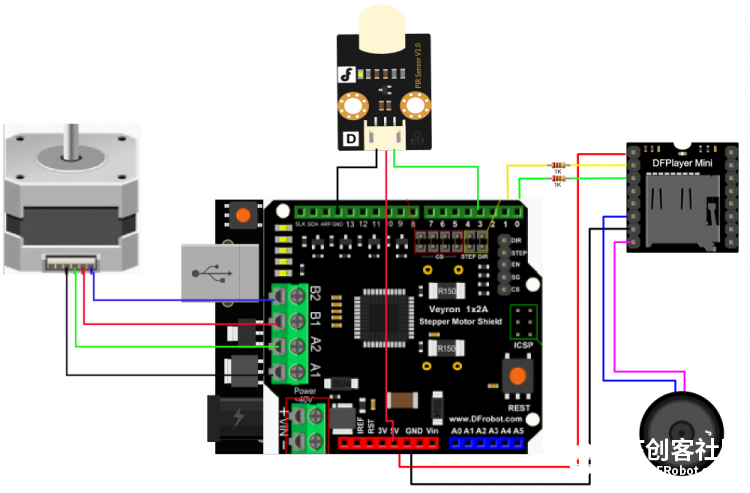
耳畔呜咽的风,如同怨灵般,撕咬着着腐朽的窗棂,"吱吱"作响.屋檐上那只寒鸦悲凉的啼鸣,仿佛诉说着这里曾发生的一切.头顶的大钟像是修罗炼狱屠杀厂,那长长的时针和分针,显的格外刺眼,又好似两把锋利的剑,要刺穿人的心腑.空气中弥漫了尸体的恶臭,也夹杂着那迷人的香气.夜肆无忌惮的在周围狂舞着,想吞噬一切想要靠近他的生命."当,当,当..."那钟声响起12声,不那不是钟声,那是死亡之音,是死神的召唤.门外,听见"踏,踏,踏..."的脚步渐行渐近.....  一、视频展示 二.恶搞的一瞬间  三、制作过程 1.搭建电路 (1)电路原理图:通过步进电机控制板控制步进电机的运动。通过人体红外热释电判断是否有人经过,如果有人经过就会触发步进电机的运动释放人头面具,同时播放MP3音乐。然后延迟一段时间再启动步进电机收回人头面具。 (2)电路实际连接图:在连接的过程中,要注意控制板和步进电机驱动都要供电。MP3需要连接1K电阻,这样声音会好一点。 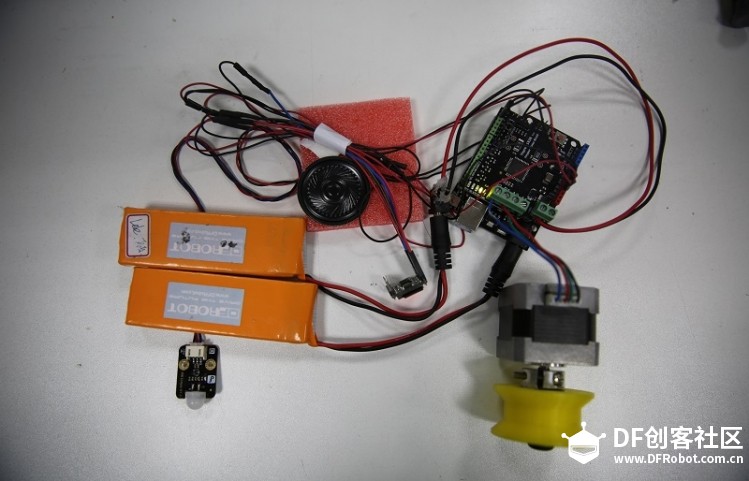 2.画3D模型:通过3D建模打印一个轮子,注意轮子不能太大,因为太大动力就会不够。同时轮子也不能太小,太小的话速度就会太慢效果不太好。 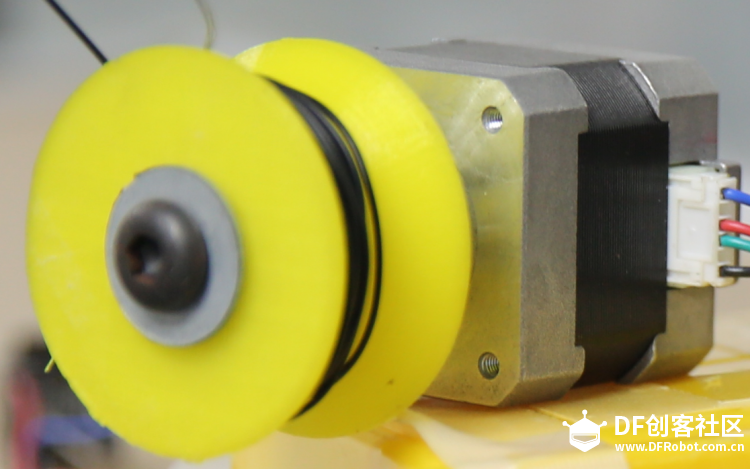 3.装扮人头 人脸的话可以自己做一个鬼脸,也可以从淘宝上面购买面具。可以在面具的眼睛里面安装LED灯,这样就更加恐怖。  4.安装:把鬼脸吊在恶搞的地方,上面需要一个滑轮,这样可以更好的安装步进电机扩展板和控制板。如果上面可以直接安装步进电机那就更好了。在安装MP3的时候要注意喇叭需要垫一下软的东西,这样喇叭声效会好一点。同时需要把人体红外热释电传感器放在人们进来的地方。  控制器和步进电机的控制,注意步进电机扩展板和控制板都需要供电,步进电机扩展板需要电流比较大。 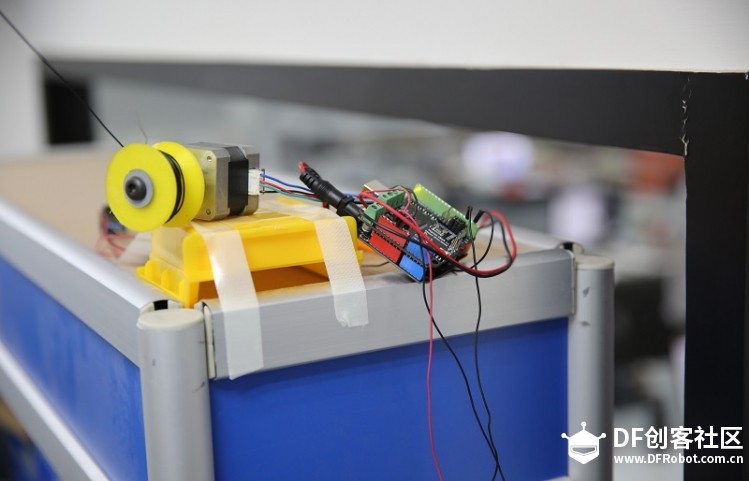 5.编写软件: #include <SPI.h> #include <TMC26XStepper.h>#include <SoftwareSerial.h> #include <DFPlayer_Mini_Mp3.h> //we have a stepper motor with 200 steps per rotation,CS pin 6, dir pin 4, step pin 5 and a current of 300mA TMC26XStepper tmc26XStepper = TMC26XStepper(200, 6, 4, 5, 800); void setup() { Serial.begin(9600); Serial.println("=============================="); Serial.println("TMC26X Stepper Driver Demo App"); Serial.println("=============================="); //set this according to you stepper Serial.println("Configuring stepper driver"); //char constant_off_time, char blank_time, char hysteresis_start, char hysteresis_end, char hysteresis_decrement tmc26XStepper.setSpreadCycleChopper(2, 24, 8, 6, 0); tmc26XStepper.setRandomOffTime(0); tmc26XStepper.SPI_setCoilCurrent(100); tmc26XStepper.setMicrosteps(128); tmc26XStepper.setStallGuardThreshold(4, 0); Serial.println("config finished, starting"); Serial.println("started"); mp3_set_serial (Serial); //set Serial for DFPlayer-mini mp3 module mp3_set_volume (30); pinMode(3, INPUT); } void loop() { if (digitalRead(3) == 1) { tmc26XStepper.SPI_setSpeed(250); //Set 120 RPM per minute tmc26XStepper.SPI_step(-1000); //Set the running steps to 200 steps tmc26XStepper.spi_start() ; //Motor starting delay(100); mp3_play (1); //play mp3 delay (5000); tmc26XStepper.SPI_setSpeed(250); //Set 120 RPM per minute tmc26XStepper.SPI_step(1000); // tmc26XStepper.spi_start() ; delay(100); } } 四、步进电机以及驱动介绍 1、步进电机介绍: 步进电机在控制系统中具有广泛的应用。它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。 有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。 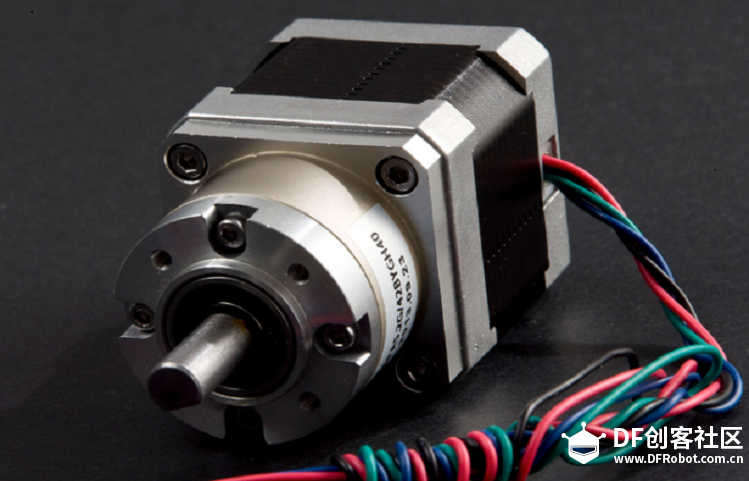 2. 步进电机的工作原理file:///C:\Users\free\AppData\Local\Temp\ksohtml\wpsD69C.tmp.png 该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。图1是该四相反应式步进电机工作原理示意图。 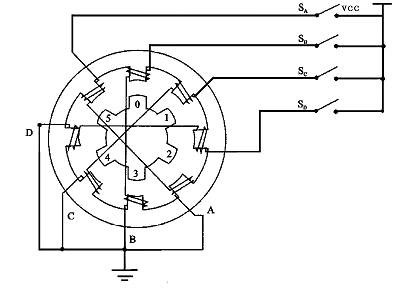 图1 四相步进电机步进示意图 开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。file:///C:\Users\free\AppData\Local\Temp\ksohtml\wpsD6EF.tmp.png 四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示: 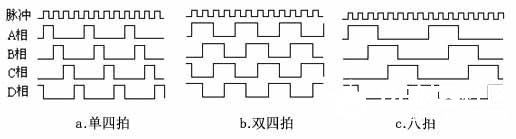 图2.步进电机工作时序波形图 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 影后
影后




 /////
/////






