|
64349| 43
|
[项目] 小白无障碍制作——基于Romeo BLE mini 控制器的BOB |
|
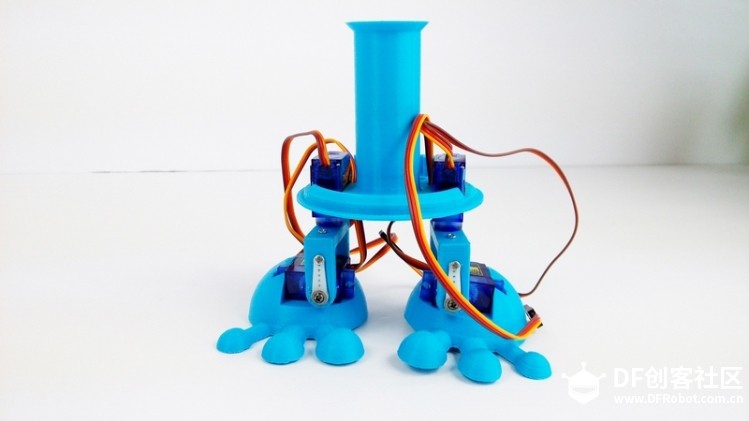
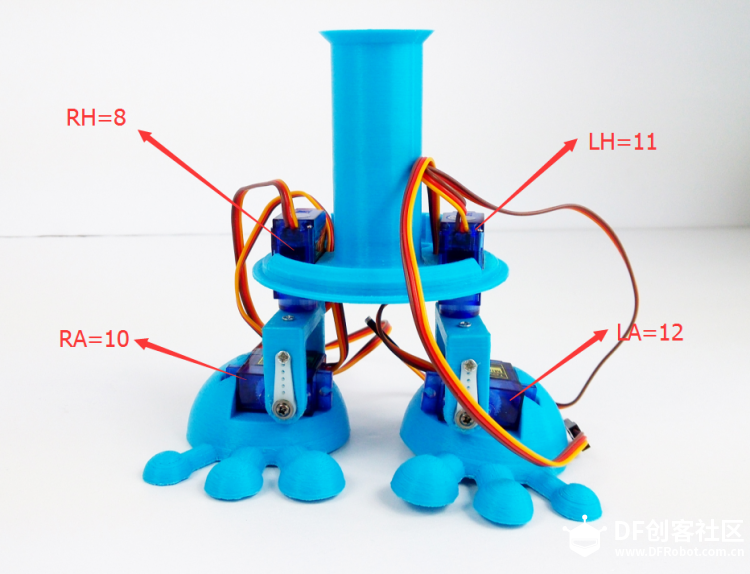
今天给大家介绍的是基于Romeo BLE mini 控制器的BOB,当然这东西大家一定不陌生,作为一个桌面级的入门玩具机器人,还是蛮可爱的。 【视频展示】 【图片展示】  【制作器材】 工具: 材料: 1.Romeo BLE mini 控制器(绝对是一款经典之作,尤其是身材) 2.TowerPro SG90舵机(如果是给熊孩子玩,可以考虑金属的) 3.超声波传感器 5.圆柱形充电器(淘宝) 【制作步骤】 一、打印结构件  都是基本结构类型,没有什么特别注意的地方。主要考虑到的是结构的稳定性,所以我在Cura中,设置头部、躯干的填充率为20%,其它部分100%。从而避免头重脚轻的结构出现。 二、安装 1.安装库 本例中使用了一个VarSpeedServo库,使用它让你的程序代码简单不少。Arduino 库文件的更新方法:解压库文件压缩包,将其复制到X:\Program Files\Arduino\libraries目录下即可。 2.安装膝关节舵机 在开始安装舵机前适当清理膝盖部位,舵机务必保证在中位,这里我们可以下载icbob_servo_center.zip。解压到你的Arduino目录。然后运行这个Arduino程序调整每个舵机,保证其初始位置的正确性。这步做完后,我们可以将 舵机安装到膝关节和髋关节上,如下图  舵盘安装在膝关节上  舵机安装在膝关节上  髋关节安装  另外一只方法一致 3.将腿安装到身体 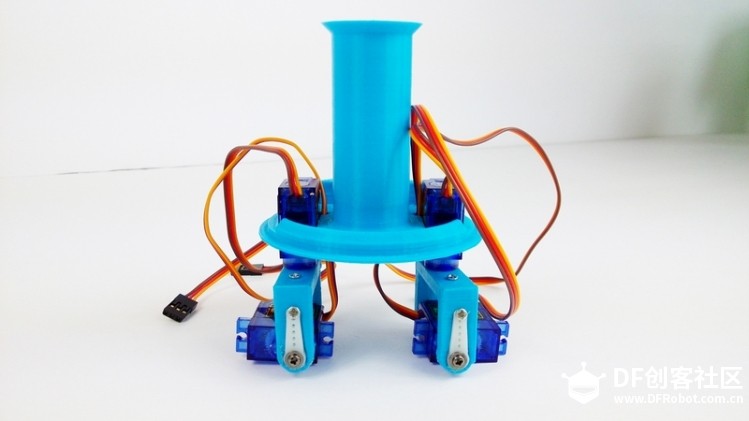 这里需要注意前后的方向。用螺丝将其固定 4.将脚安装到身体 5.舵机与Romeo连接
6.复位舵机 烧录下列代码复位舵机(icbob_home_calibration) 7.行走步态 烧录下列代码可让其向前行走(icbob_move_generator) 8.添加超声波传感器 将超声波传感器安放在头部眼眶中,trigger_pin接控制器数字口12和echo_pin 接主控器数字口3 。VVC和GND接主控板+5V和GND 9.避障行走 烧录下列代码可实现其避障行走(icbob_walk_avoid_turn) 自此制作完毕,希望大家能玩出更多花样。
|
hnyzcj 发表于 2016-3-4 13:47 有资料么百度云发我啊谢谢 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed




 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






