之前看见CurieNano的试用,一直想学点机器学习方面的知识,所以一直很关注,但是看了一圈试用项目,很多都拿这块板子做了普通Arduino板子就能做的东西,没有用到居里的128个神经单元,感觉很可惜,我都斗胆向Luna大大申请了一块CurieNano,做点机器学习的研究,希望抛砖引玉,大神上点更多的创意想法。
1、下载arduino IDE 1.8.2 可以去www.arduino.cc 下载.
版本不够,编译不过,别怪我通过IDE自带的板卡管理器下载,速度太慢了,且有时候还会被墙,导致我这更新过慢,实在不好意思
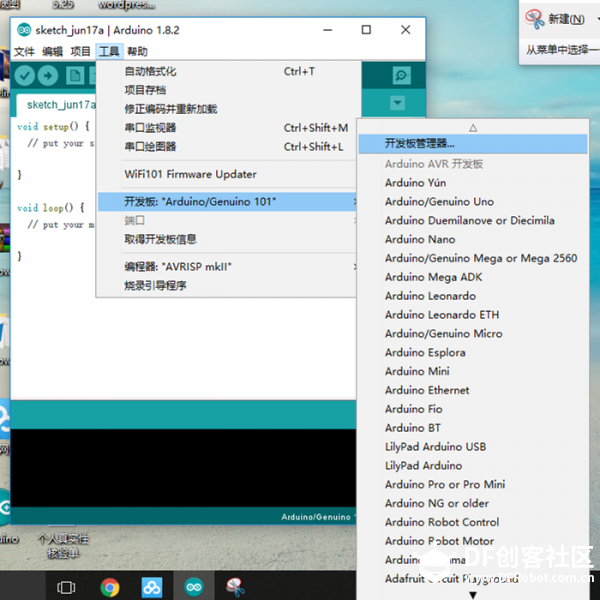
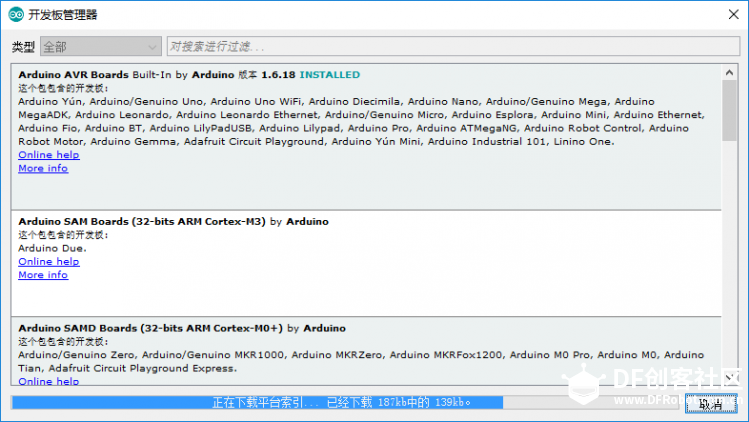
2、打开IDE,下载支持文件
当然也可以通过其他方式,这里要感谢奈何大大制作的安装包
所以这里我把都传到了百度运,如果你等不急的话,直接从百度云下载吧(里面有版本编号,推荐下载版本号高的)
http://pan.baidu.com/s/1bogLHF5
3、驱动安装
驱动下载:
http://pan.baidu.com/s/1nuz3Wjn
如果你已经安装了 101/CurieNano扩展包,那么可以通过如下地址找到驱动,并安装。
C:\Users\Administrator\AppData\Local\Arduino15\packages\Intel\hardware\arc32\2.0.2\drivers
32位系统运行dpinst-x86.exe,64位系统运行dpinst-amd64.exe
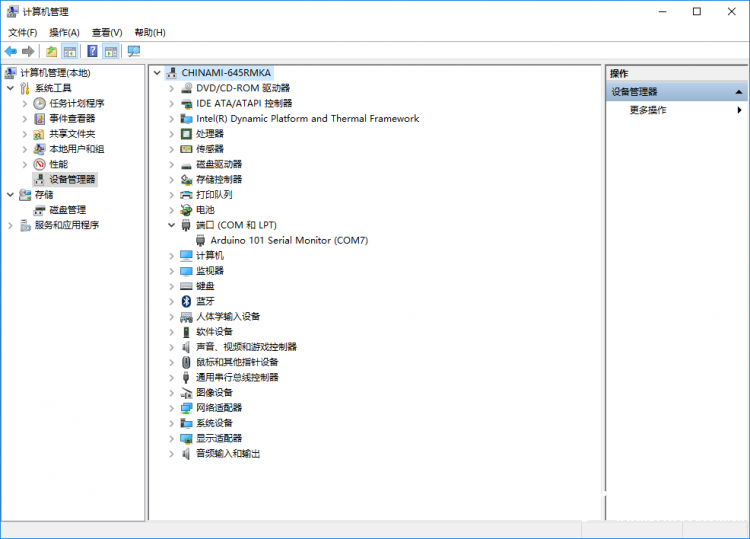
安装完成后,查看设备管理器,如果有名为Genuino 101/CurieNano的串口出现,则说明安装成功,如图:
项目原理1.电脑上运行Processing客户端,负责收集实时视频,发送给Intel Curie Genduino 101/CurieNano,
2.电脑USB外接Intel Curie Genduino101/CurieNano,负责对视频进行训练和识别,可直接在arduino sketch中编译传送给CurieNano:
当然有人会说CurieNano处理不了视频,实际处理的是光流向量。
接下来部署Processing开发环境
首先在电脑安装Processing开发平台。在https://www.processing.org下载安装最新版本Processing软件。
然后打开Processing软件,给Processing平台添加OpenCV库。
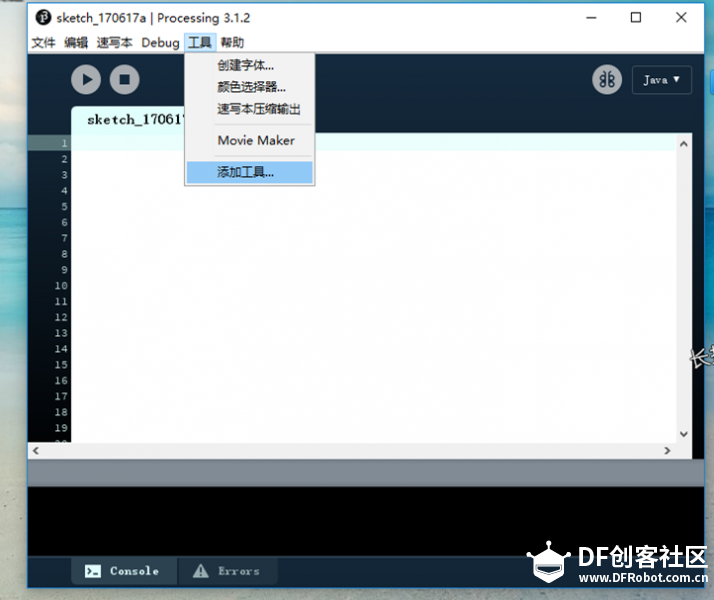
选择菜单栏 工具-添加工具。点击鼠标。打开工具管理器。
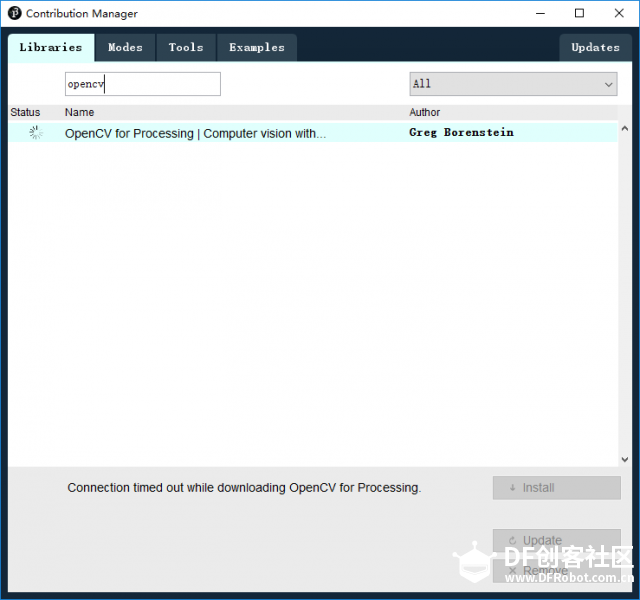
选择第一页, Libraries,在下拉菜单中选择OpenV,点击Install安装。(注意,这一步需翻墙)
安装成功后,就可以使用本文后附的Processing程序代码了。程序代码启动电脑摄像头,分析拍摄的实时录像光流方向,并传递给Intel Curie nano / Genduino 101进行处理。
再回到arduino IDE
确保sketch的开发板管理器已经安装和正确识别Curie以后,再添加CuireNeuron库。
下载CuireNeuron库
现在这个库官网收费了,我这里提供个免费版本
链接:http://pan.baidu.com/s/1eRNrRLg 密码:j7w5
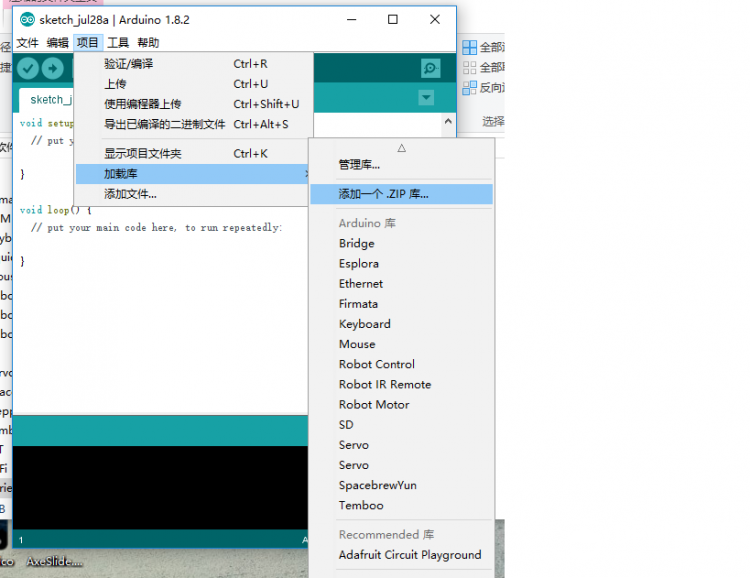
然后添加刚才我们下载好的CuireNeuron.zip库文件。
再然后arduino代码
- /**
- *processing control a 2-4 servos platform
- */
-
- #include <CurieNeurons.h>
- CurieNeurons hNN;
-
- int catL = 0;
- int prevcat = 0;
- int dist, cat, nid, nsr, ncount;
-
- const short sampleNbr = 20;
- const short signalNbr = 2;
- byte vector[sampleNbr*signalNbr];
- byte flowX[sampleNbr];
- byte flowY[sampleNbr];
- boolean a = false;
- void setup()
- {
- pinMode(13, OUTPUT);
- Serial.begin(115200);
- while (!Serial);
- if(hNN.begin()==0){
- Serial.print("neurons initialized");
- hNN.forget(500);
- }
- else{
- Serial.print("error.");
- }
- }
- void loop()
- {
- while(Serial.available()==0);
- char data=Serial.read();
- for(int i = 0; i < sampleNbr; i++)
- {
- while(Serial.available()==0);
- vector[i*signalNbr]=Serial.read();
- }
- for(int i = 0; i < sampleNbr; i++)
- {
- while(Serial.available()==0);
- vector[i*signalNbr+1]=Serial.read();
- }
- a = !a;
- digitalWrite(13, a); // turn the LED on (HIGH is the voltage level)
- switch(data)
- {
- case '%':
- //learn 1
- catL = 1;
- /*for(int i = 0; i <sampleNbr; i++){
- Serial.write(vector[i*signalNbr]);
- Serial.write(vector[i*signalNbr+1]);
- }*/
- ncount = hNN.learn(vector, sampleNbr*signalNbr, catL);
- Serial.write(ncount);
- Serial.write("#");
- Serial.flush();
- break;
- case '^':
- //learn 1
- catL = 2;
- /*for(int i = 0; i <sampleNbr; i++){
- Serial.write(vector[i*signalNbr]);
- Serial.write(vector[i*signalNbr+1]);
- }*/
- ncount = hNN.learn(vector, sampleNbr*signalNbr, catL);
- Serial.write(ncount);
- Serial.write("#");
- Serial.flush();
- break;
- case '[i][i][font=Microsoft Yahei, Simsun]这个时候你还需要下载个video库[/font]
- [font=Microsoft Yahei, Simsun]
- [/font]收工
- [/i][/i]
- :
- // Recognize
- hNN.classify(vector, sampleNbr*signalNbr,&dist, &cat, &nid);
- Serial.write(cat);
- Serial.write("#");
- Serial.flush();
- break;
-
- }
-
- }[/mw_shl_code]
-
-
-
- Processing程序
-
-
- [mw_shl_code=applescript,true]import gab.opencv.*;
- import processing.video.*;
- import processing.serial.*;
- Serial port;
-
- OpenCV opencv;
- Capture video;
- byte lastx, lasty;
- byte currentx, currenty;
- byte[] rawVecX;
- byte[] rawVecY;
- int index;
- int count;
- boolean action;
- final int sampleNbr = 20;
- byte state;
- byte[] result;
- int P_result;
-
- void setup() {
- size(640, 240);
-
- result = new byte[3];
- P_result = 0;
- rawVecX = new byte[sampleNbr];
- rawVecY = new byte[sampleNbr];
- lastx = 0;
- lasty = 0;
- count = 0;
- port = new Serial(this, Serial.list()[0], 115200);
- video = new Capture(this, 320, 240);
- opencv = new OpenCV(this, 320, 240);
- video.start();
- }
-
- void draw() {
- if(keyPressed){
- if (key == 'a' || key == 'A') {
- state = 1;
- println("change state to learning 1");
- }
- else if (key == 's' || key == 'S') {
- state = 2;
- println("change state to learning 2");;
-
- }
- else{
- state = 3;
- println("change state to classifying");
- }
- }
- background(0);
- opencv.loadImage(video);
- opencv.calculateOpticalFlow();
- image(video, 0, 0);
- translate(video.width,0);
- stroke(255,0,0);
- opencv.drawOpticalFlow();
- PVector aveFlow = opencv.getAverageFlow();
- int flowScale = 50;
- stroke(255);
- strokeWeight(2);
-
- textSize(50);
- if(result[2] == 1){
- text("Yes", 10, 230);
- }
- else if(result[2] == 2){
- text("No", 10, 230);
- }
- else{
- text("?", 10, 230);
- }
- textSize(40);
- if(result[1] == 1){
- text("Yes", 10, 175);
- }
- else if(result[1] == 2){
- text("No", 10, 175);
- }
- else{
- text("?", 10, 175);
- }
- textSize(30);
- if(result[0] == 1){
- text("Yes", 10, 130);
- }
- else if(result[0] == 2){
- text("No", 10, 130);
- }
- else{
- text("?", 10, 130);
- }
-
- line(video.width/2, video.height/2, video.width/2 + aveFlow.x*flowScale, video.height/2 + aveFlow.y*flowScale);
-
- currentx=byte(map(aveFlow.x, -1, 1, 0, 255));
- currenty=byte(map(aveFlow.y, -1, 1, 0, 255));
- if (action == true){
- if(index < sampleNbr){
- rawVecX[index] = currentx;
- rawVecY[index] = currenty;
- index++;
- }
- else
- {
- action = false;
- print("count=");
- println(count);
- for(int i = 0; i < sampleNbr; i++){
- print(int(rawVecX));
- print(",");
- }
- println();
- for(int i = 0; i < sampleNbr; i++){
- print(int(rawVecY));
- print(",");
- }
- print("|");
- println(state);
- sendToCurie(state, rawVecX, rawVecY);
- println("accepted");
- }
- }
- else
- {
- if(abs(int(currentx)-int(lastx)) > 30 || abs(int(currenty)-int(lasty)) > 30){
- action = true;
- index = 0;
- count = count + 1;
- println("started");
- }
- }
- lastx = currentx;
- lasty = currenty;
-
- }
-
- void captureEvent(Capture c) {
- c.read();
- }
-
- void sendToCurie(byte LorC, byte[] vecX, byte[] vecY) //send yaw and roll angel to MegaPi to control servos
- {
- if(LorC == 1){
- port.write('%');
- }
- else if(LorC == 2){
- port.write('^');
- }
- else{
- port.write('[i][i][font=Microsoft Yahei, Simsun]这个时候你还需要下载个video库[/font]
- [font=Microsoft Yahei, Simsun]
- [/font]收工
- [/i][/i]
- );
- }
-
- port.write(vecX);
- port.write(vecY);
-
- byte inByte;
- int ct = 0;
- while (port.available() > 0){
- inByte = byte(port.read());
- print(int(inByte));
- if(ct == 0){
- result[0] = result[1];
- result[1] = result[2];
- result[2] = inByte;
- }
- print(">");
- if(inByte == '#'){
- break;
- }
- ct = ct + 1;
- }
- }
这个时候你还需要下载个video库
收工
|
 老版主限定
老版主限定



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







