|
6638| 0
|
[入门教程] 【掌控】新技能: 画圆 |
|
本帖最后由 rzyzzxw 于 2018-12-21 17:20 编辑 掌控新技能:画圆 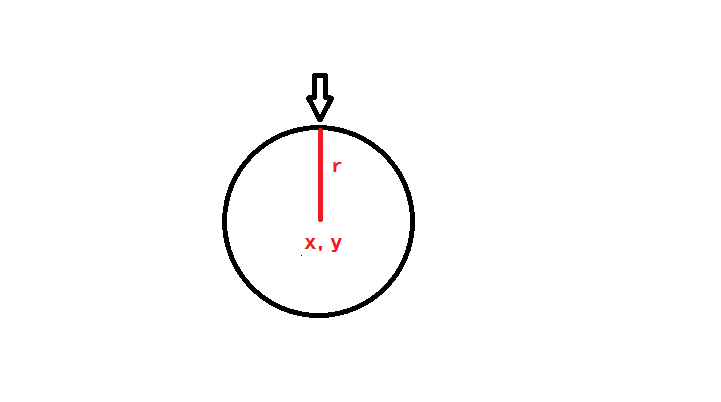 【新技能】 oled.circle(x, y, radius, c) 绘制圆 x 、y -圆心坐标。radius -圆半径大小 c -为1时,像素点亮;c 为0时,像素点灭。 oled.fill_circle(x, y, radius, c) x 、y -圆心坐标。radius -圆半径大小 c -为1时,像素点亮;c 为0时,像素点灭。 【空心圆】 # 画空心圆代码 from mpython import * # 半径 中心x y坐标 radius = 10 center_x = 64 center_y = 32 oled.fill(0) oled.circle(center_x, center_y, radius, 1) oled.show() 【实心圆】 [mw_shl_code=python,true]# 画实心圆代码 from mpython import * # 半径 中心x y坐标 radius = 8 center_x = 64 center_y = 32 oled.fill(0) oled.fill_circle(center_x, center_y, radius, 1) oled.show()[/mw_shl_code] 【右移的圆】 [mw_shl_code=python,true]# 右移的圆 from mpython import * # 半径 中心x y坐标 radius = 8 while 1: for i in range(128): center_x = i center_y = 32 oled.fill(0) oled.circle(center_x, center_y, radius, 1) oled.show() [/mw_shl_code] 【重力小球】 [mw_shl_code=python,true]# 重力小球 from mpython import * # 半径 中心x y坐标 radius = 10 center_x = 0 center_y = 0 while True: x = accelerometer.get_y() y = accelerometer.get_x() oled.fill(0) center_x = 128-int(x*64+64) center_y = int(y*32+32) oled.fill_circle(center_x, center_y, radius, 1) oled.show()[/mw_shl_code] 上面的代码中,要理解的是这几句的算法: x = accelerometer.get_y() y = accelerometer.get_x() center_x = 128-int(x*64+64) center_y = int(y*32+32) 【小知识】 为什么是X获取加速度Y向,而y获取加速度X向的值。 加速度传感器能够测量由于重力引起的加速度,传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度值。掌控板上的加速度计可测量加速度,测量范围为 -2g 到 +2g 之间。 掌控板的测量沿3个轴,每个轴的测量值是正数或负数,正轴越趋近重力加速度方向,其数值往正数方向增加,反之往负数方向减小,当读数为 0 时,表示沿着该特定轴“水平”放置。
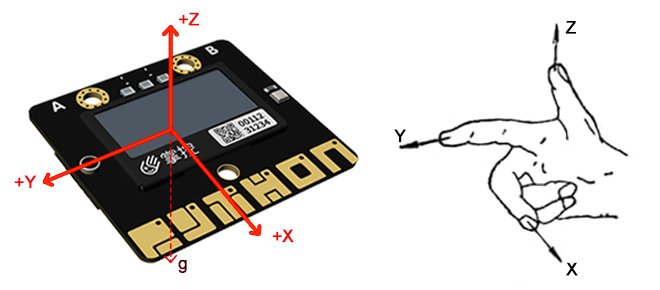 加速度的读数范围是1和-1之间,左向为正,右向为负。 所以在把加速度值转化为OLED坐标,用了这个式子:center_x = 128-int(x*64+64) int()是取整函数 当加速度y为1时,状态是向左倾,x*64+64=128 ,取整后128-int(x*64+64)=0,是屏幕的最左点。 当加速度y为-1时,状态是向右倾,x*64+64=0 ,取整后128-int(x*64+64)=128,是屏幕的最左点。 center_y = int(y*32+32) 向上向下倾类似。 【上升气泡】 [mw_shl_code=python,true]# 上升气泡 from mpython import * # 半径 中心x y坐标 radius = 10 center_x = 0 center_y = 0 while True: x = accelerometer.get_y() y = accelerometer.get_x() oled.fill(0) center_x = 128-int(x*64+64) center_y = int(y*32+32) oled.circle(128-center_x, 64-center_y, radius, 1) oled.show() [/mw_shl_code] 这个代码,重点在这里 oled.circle(128-center_x, 64-center_y, radius, 1) 通过减法实现方向改变。  |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









