|
8727| 0
|
【Mind+】MAX: BOT 机器人探索之旅 第六章 无线通信 |
|
【Mind+】MAX: BOT 机器人探索之旅 第六章 无线通信 如果拥有了两个Max:bot会发生什么样的效果呢?  学习目标 1.学习无线通信的基本用法 2.学习加速度传感器的使用 电子模块 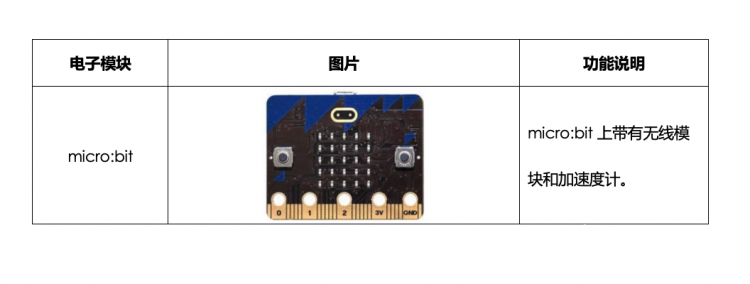 6.1 Say Hi 知识要点 动手实践 探究思考 6.2 体感赛车 知识要点 动手实践 探究思考 6.1 Say Hi 当Max:bot遇到了另外一个Max:bot小伙伴,先来打个招呼吧!  什么是无线通信功能? 在无线通信功能中,需要两个micro:bit,发出信号的叫做“发射端”,接收信号的叫做“接收端”。 知识要点 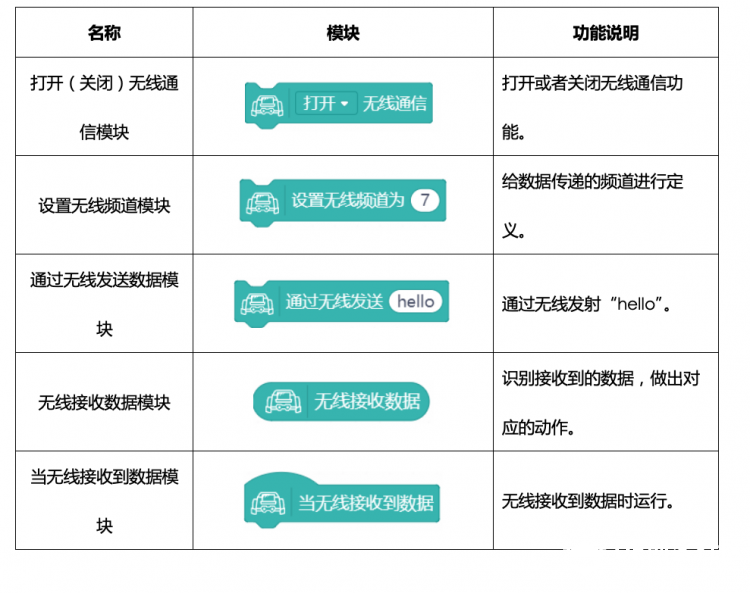 1、发射端 (1)打开Mind+软件,新建项目。 (2)打开无线通信功能,设置无线频道为1。  先来打个招呼吧! 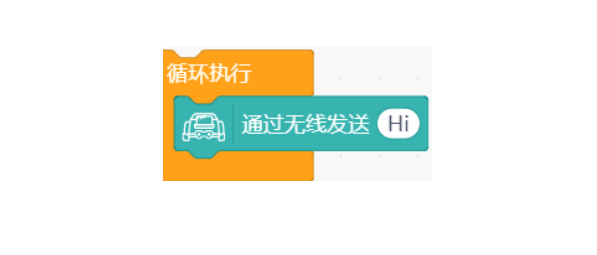  (1)打开Mind+软件,新建项目。 (2)打开无线通信功能并设置与发射端相同的频道。   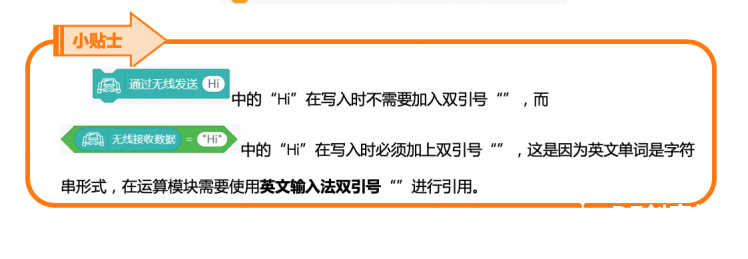  探究思考 在一些神秘的场合中,需要发射一些数字暗号,来帮助双方来识别对方的身份,也就是在谍战剧中需要一些代码暗号。试着和小伙伴来一场谍战游戏吧。 请发送一串暗号,例如:1231;让你的小伙伴来说出(显示)对应的暗号,1321。   什么是加速度传感器? 加速度传感器可以感受到物体的速度变化情况。micro:bit上具有加速度传感器,能判断micro:bit的运动方向、角度、手势等场景。 手机上也有加速度传感器,可以玩一些体感互动游戏;手环上的加速度传感器,可以判读运动情况,进行计步。  知识要点  1、发射端 (1)打开Mind+软件,新建项目。 (2)打开无线通信功能,设置无线频道为1。 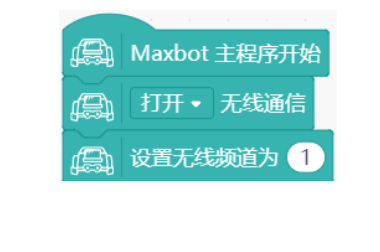 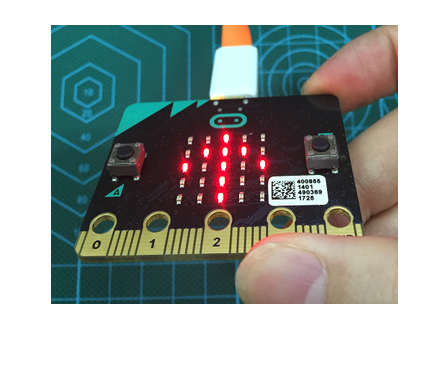  停止:  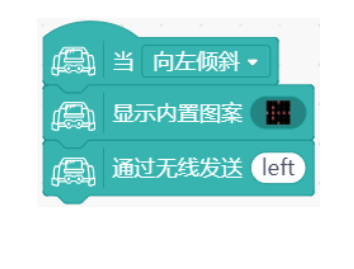  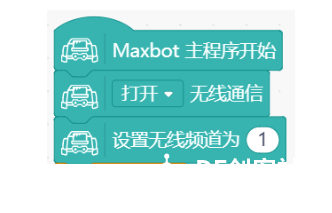  (1)打开Mind+软件,新建项目。 (2)需要根据接收的信号指令,控制Max:bot动作。 请根据以下流程图,进行编程: 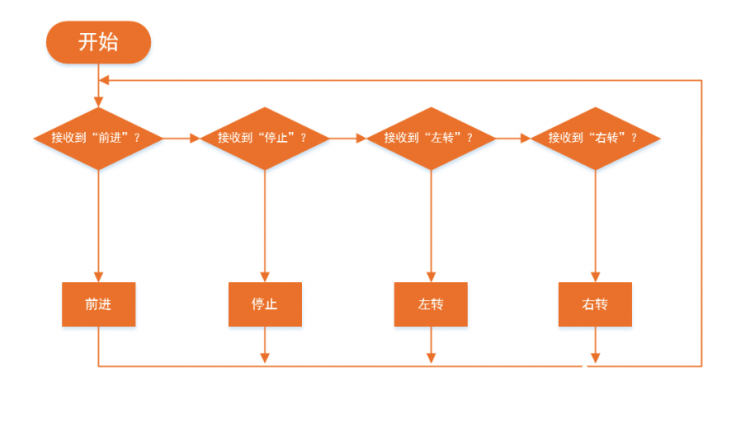 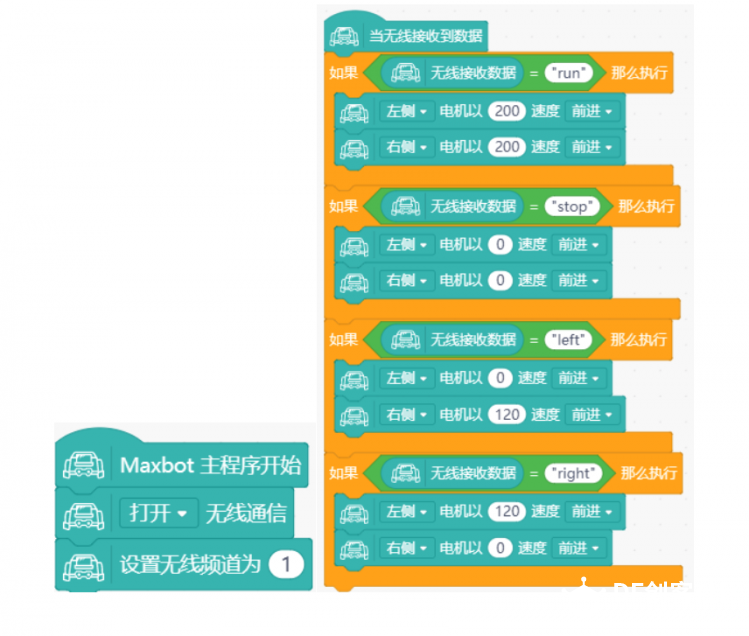 在体感游戏中,如果你控制端的摆动的角度越大,赛车会转向的角度越大,我们的体感赛车Max:bot该怎样实现呢? 咨询群:Mind+官方交流QQ群 671877416 目录牵引: 【Mind+】MAX: BOT 机器人探索之旅(系列教程)导航帖 【Mind+】MAX: BOT 机器人探索之旅 MAX: BOT组装教程 【Mind+】MAX: BOT 机器人探索之旅 第一章 小车快跑 【Mind+】MAX: BOT 机器人探索之旅 第二章 感光的眼睛 【Mind+】MAX: BOT 机器人探索之旅 第四章 秘密武器超声波 【Mind+】MAX: BOT 机器人探索之旅 第五章 勇往直前的MAX: BOT 【Mind+】MAX: BOT 机器人探索之旅 第六章 无线通信 【Mind+】MAX: BOT 机器人探索之旅 第七章 声光互动  ▲mind+官网:https://www.mindplus.cc Mind+最早是由DFRobot公司于2013年推出的图形化编程软件,能够让不懂编程的艺术家们通过几分钟的学习即可控制Arduino开源硬件,从而拓宽一些新的思维方式。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






