|
25195| 0
|
【Mind+】MAX: BOT 机器人探索之旅 第四章 秘密武器超声波 |
|
【Mind+】MAX: BOT 机器人探索之旅 第四章 秘密武器超声波 Max:bot可不只有感光的“眼睛”哦,你是不是在想小车前面这对“大眼睛”能够帮助Max:bot做些什么呢?  这可是Max:bot的秘密武器,一起来探索这个功能吧! 学习目标 1.学习超声波的工作原理 2.学习使用串口读值 3.学习使用变量模块 电子模块  4.1 超声波测距 知识要点 动手实践 探究思考 4.2 行车安全仪 知识要点 动手实践 探究思考 4.1 超声波测距 Max:bot的秘密武器超声波能够帮助解决一些实际问题。当你还在拿尺子测量距离的时候,Max:bot已经可以轻松帮你测量距离了。 什么是超声波呢? 我们知道,当物体振动时会发出声音。科学家们将每秒钟振动的次数称为声音的频率,它的单位是赫兹。我们人类耳朵能听到的声波频率为20~2000赫兹。  超声波怎么测距? 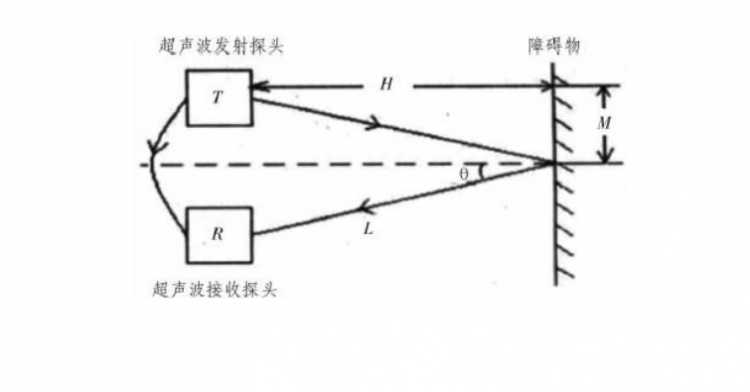 超声波发射器向某一方向发射超声波,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波。通过转换计算,就得到了距离H。 同学们,想不想试试使用超声波传感器轻松测量距离? 知识要点 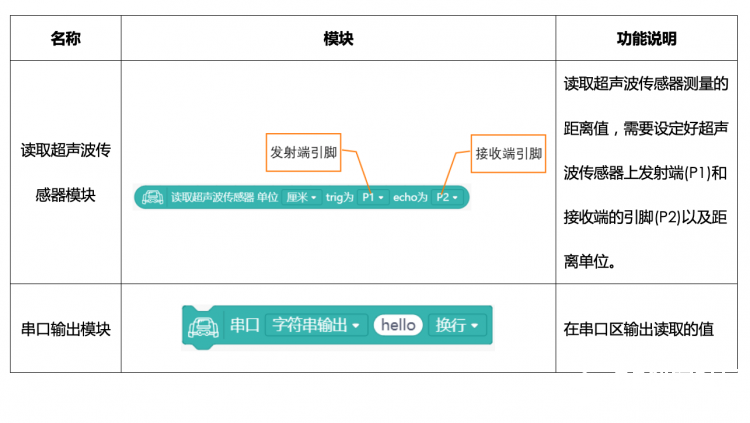 (1)打开Mind+软件,新建项目。 (2)读取超声波传感器测量的距离值。 在2.1探秘光强的大小一节中我们使用显示模块在micro:bit的点阵屏上读取到了光强值,其实通过串口也可以进行读值。以超声波传感器为例,选择读取超 声波传感器模块和串口输出模块组合后放入循环模块中。 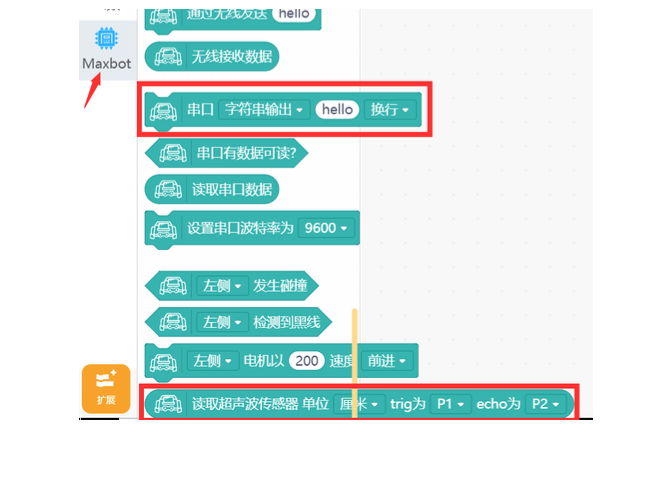 加入延时模块防止串口区读值过快。 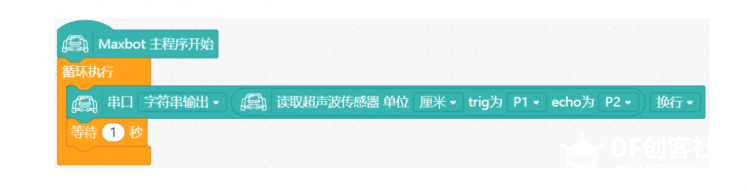 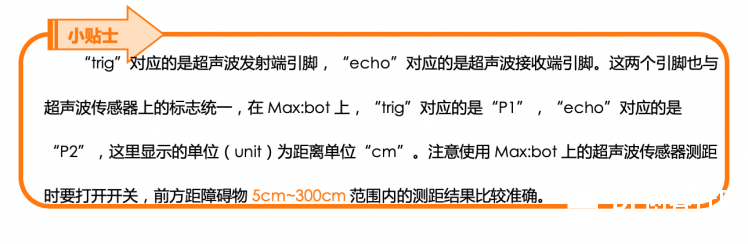 (4)打开串口开关查看超声波传感器测量的距离值。  探究思考 利用超声波传感器怎么测量身高呢? 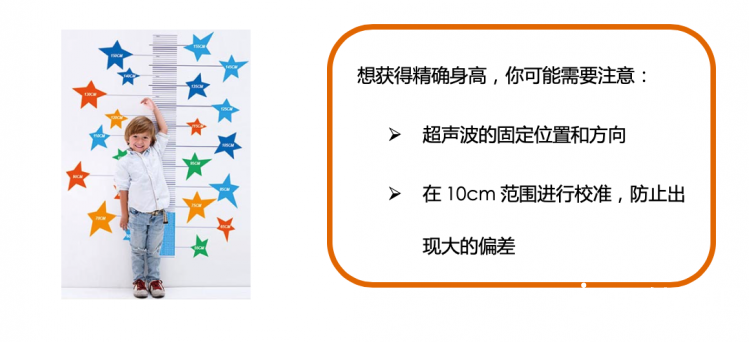 在川流不息的马路上,交通事故的发生总是那么的不可预测,如果可以帮助汽车在行驶过程中判断危险的存在,就会有效地避免事故,保证人身安全。 知识要点 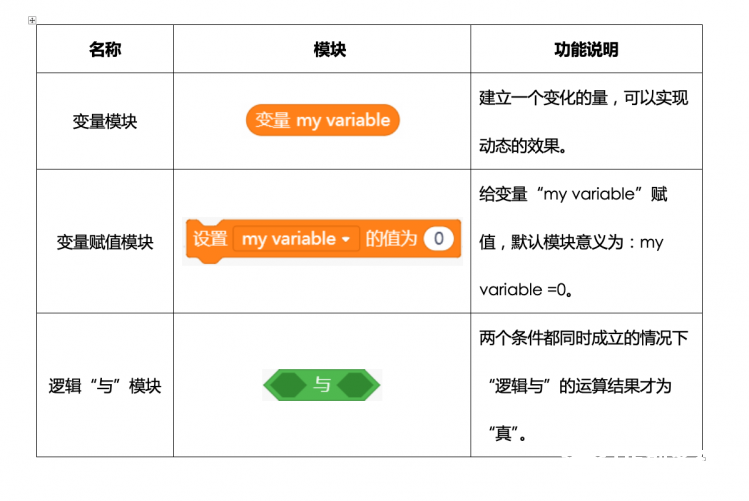 (1)打开Mind+软件,新建项目。 (2)使用变量 感知系统可以实时地检测外界环境,如环境光传感器会实时监测到变化的光的强度值。在程序编写过程中我们可能要多次用到这一值,因此,通常把这类经常需要存储和调用的值赋给一个变量。“my variable”是变量名,为了方便区分不同的变量,我们可以用不同的名字为变量命名。 鼠标右击选中变量模块,选择“重命名变量”,将变量名改为“distance”。    要怎么实现功能呢?编辑程序之前,先来写个流程图,梳理下思路吧。 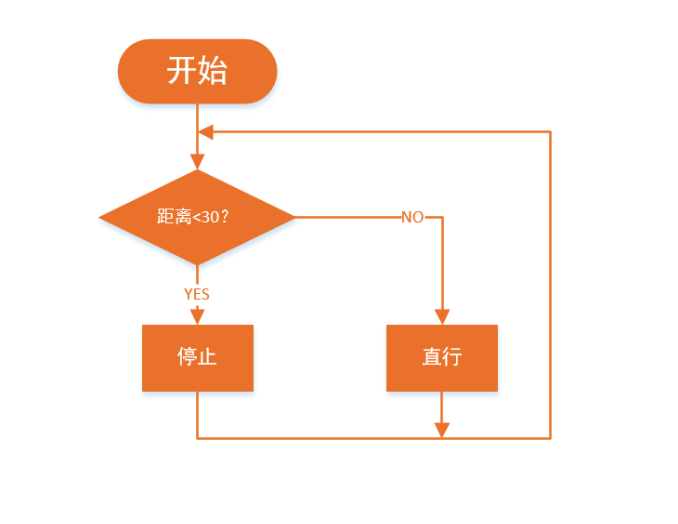  在实际生活中,正在行驶的车辆是不会一下子就停下的,而是会慢慢地降低速度直到停下。也就是说随着距离变小,速度也慢慢降低。你能实现吗?  咨询群:Mind+官方交流QQ群 671877416 目录牵引: 【Mind+】MAX: BOT 机器人探索之旅(系列教程)导航帖 【Mind+】MAX: BOT 机器人探索之旅 MAX: BOT组装教程 【Mind+】MAX: BOT 机器人探索之旅 第一章 小车快跑 【Mind+】MAX: BOT 机器人探索之旅 第二章 感光的眼睛 【Mind+】MAX: BOT 机器人探索之旅 第四章 秘密武器超声波 【Mind+】MAX: BOT 机器人探索之旅 第五章 勇往直前的MAX: BOT 【Mind+】MAX: BOT 机器人探索之旅 第六章 无线通信 【Mind+】MAX: BOT 机器人探索之旅 第七章 声光互动  ▲mind+官网:https://www.mindplus.cc Mind+最早是由DFRobot公司于2013年推出的图形化编程软件,能够让不懂编程的艺术家们通过几分钟的学习即可控制Arduino开源硬件,从而拓宽一些新的思维方式。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






