|
9953| 2
|
【Mind+】MAX: BOT 机器人探索之旅 第五章 勇往直前的MAX: BOT |
|
【Mind+】MAX: BOT 机器人探索之旅 第五章 勇往直前的MAX: BOT Max:bot机器人是个勇往直前的勇者,除了能够及时的判断前面是否有障碍物,它还有个神奇的技能:其实它有个朝向地面的“眼睛”,可以帮助它避免从高处跌落,实现沿着固定轨迹行走。快来了解一下吧。  1.学习巡线传感器的工作原理 2.学习使用函数模块 3.逻辑“与”和逻辑“非”的理解与运用 电子模块 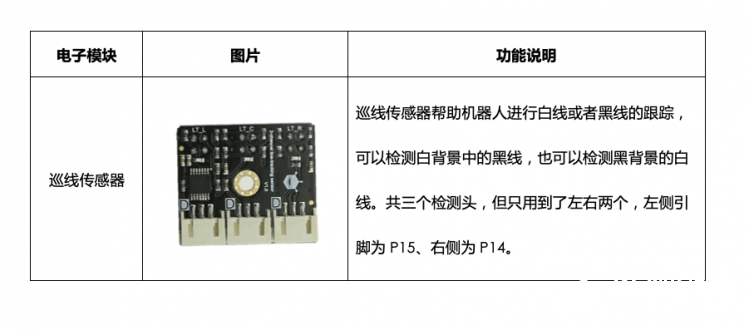 5.1 悬崖勒马
看!前面有个悬崖,可是Max:bot并没有掉下去,它可以自动后退,成功的避免“机”毁“车”亡,这多亏了巡线传感器!  巡线传感器上面有三个检测头,但是只有左右两个被启用了,分别连接在接口P15、P14。 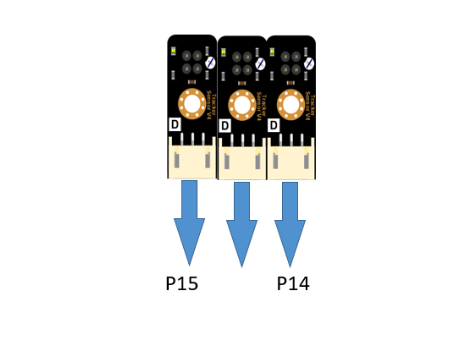  巡线传感器工作原理 当安装了巡线传感器的Max:bot在桌面上时,红外线发射端发射出的红外线被桌面反射回来,红外线接收端接收到信号,指示灯亮,返回高电平“1”; 当安装了巡线传感器的Max:bot在桌面边缘时,红外线发射端发射出的红外线不能被桌面反射回来,红外线接收端接收不到信号,指示灯灭,返回低电平“0”。 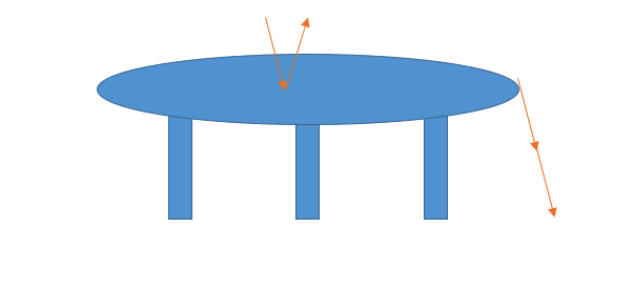 
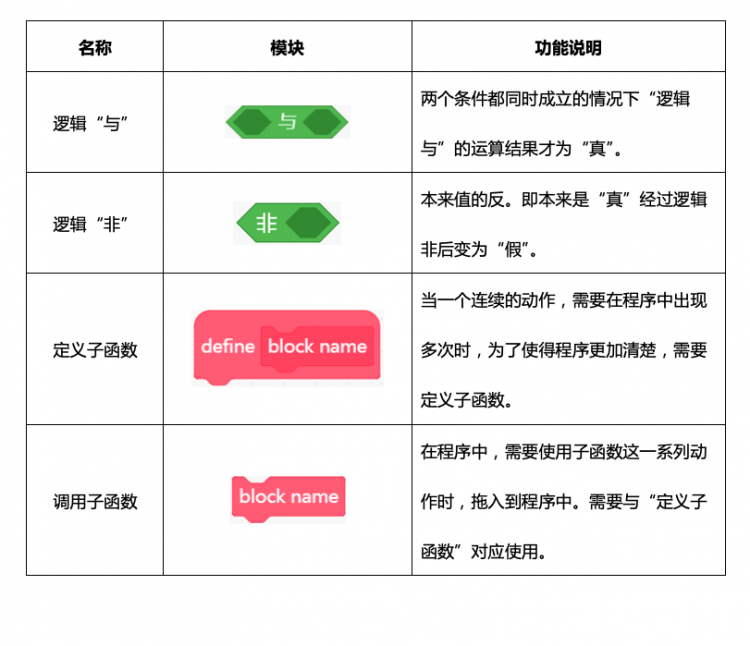
(1)打开Mind+软件,新建项目。 (2)在悬崖勒马项目中,需要用到两个巡线传感器,左侧传感器连接在P15,右侧传感器连接在P14。Max:bot在桌面上的运动状态有如下几种: 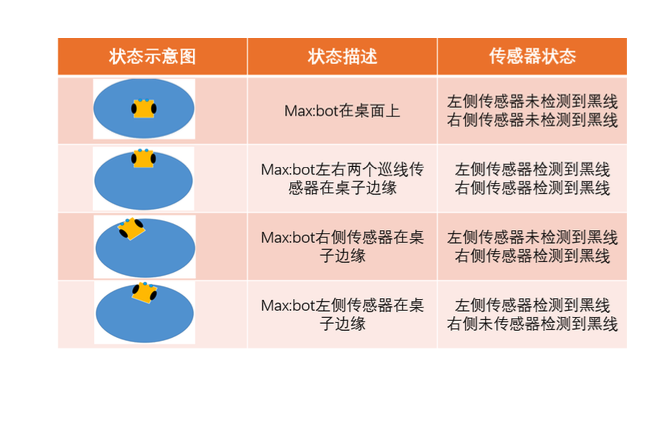 (3)根据上表所分析的Max:bot可能出现的状态,需要为编程制作流程图。 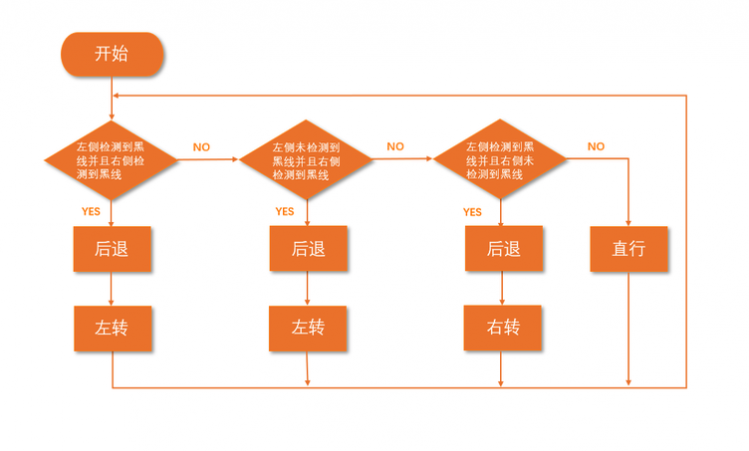 (4)定义及调用子函数 通过流程图可以看出,在悬崖勒马项目中需要多次使用“后退”和“左转”,为简化主程序,添加“后退”和“左转”两个自定义模块。  定义“后退”和“左转”两个函数。调用函数时只需将定义后的子函数模块拖入主程序中适当位置即可。 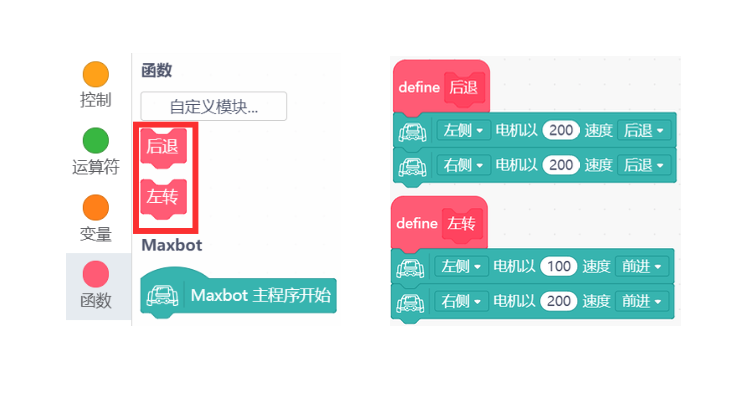 (5)根据流程图完善程序,保存项目,命名为“悬崖勒马”,将程序下载到Max:bot小车,小车就可以安全的在桌面上行驶啦!  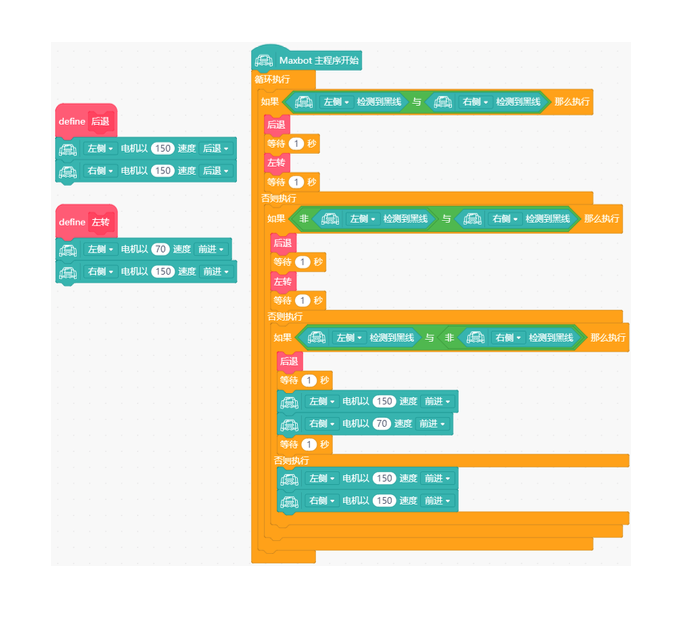
随着生活中科技化工具的丰富,扫地机器人逐渐成为居家必备,它可以自主充电,按时对地面进行清洁,但是为了防止在扫地过程中从楼梯上跌落,所以它需要具备防跌落功能。防跌落功能的实现需要依靠扫地机器人底部的多个探测器,通常在扫地机器人底部边缘安装一圈的探测器。  还有哪些场景需要这一功能呢?小朋友们,你想到了吗? 5.2 循“轨”蹈矩 Max:bot最喜欢按照地图去寻宝啦,不管多么复杂地形,都能够沿着轨迹去探索未知世界。 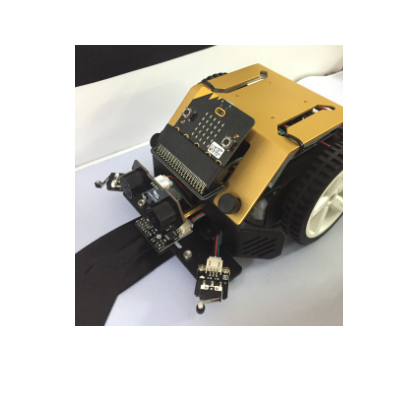

(1) 打开Mind+软件,新建项目。 (2)在本项目中,需要让Max:bot沿着黑色的轨迹行走,可以绘制黑色轨迹或使用黑色胶带。  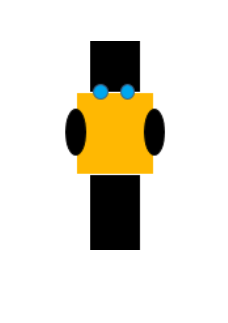 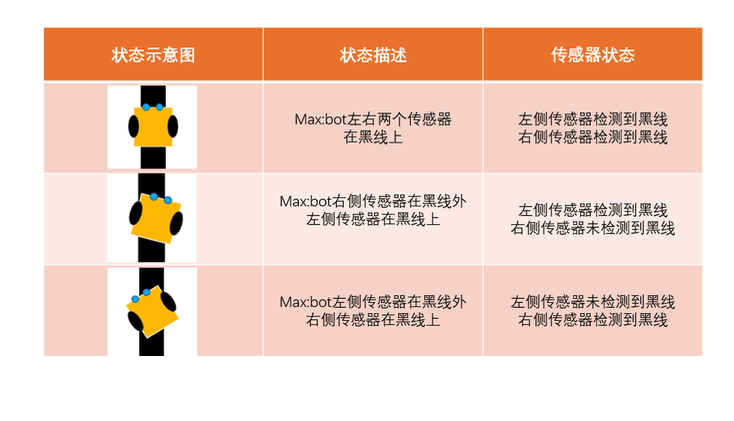 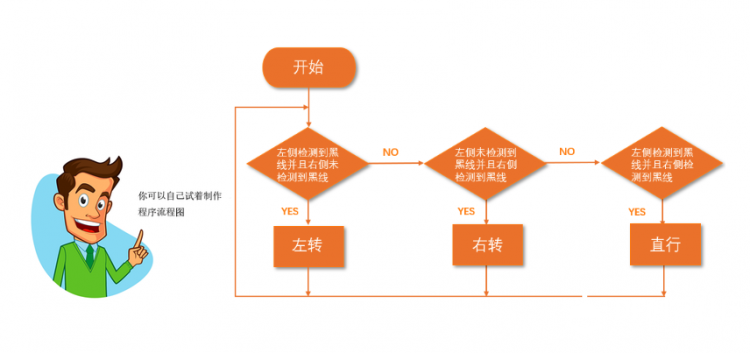 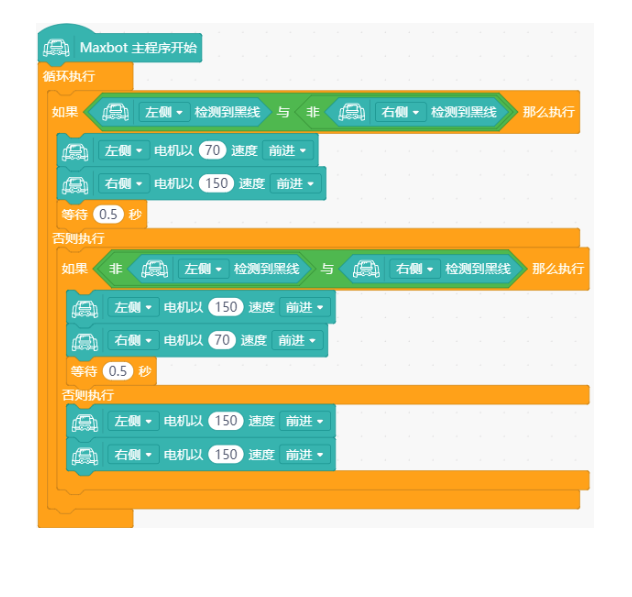
Max:bot可以沿着直线探索世界啦,给Max:bot出个难题吧。 下面的路线Max:bot可以巡线吗?你遇到了哪些问题呢?记录下来和其他小伙伴交流一下吧。 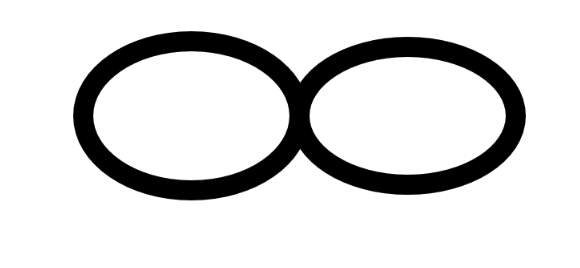 咨询群:Mind+官方交流QQ群 671877416 目录牵引:  ▲mind+官网:https://www.mindplus.cc Mind+最早是由DFRobot公司于2013年推出的图形化编程软件,能够让不懂编程的艺术家们通过几分钟的学习即可控制Arduino开源硬件,从而拓宽一些新的思维方式。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






