|
5868| 1
|
[麦昆 V4.0] 【麦昆】小麦们,向梦想,冲鸭!001 |

|
2019年1月3日,嫦娥四号成功登陆月球背面,全人类首次实现月球背面软着陆。 玉兔二号行走上月背。 这是小兔的一小步,却是人类的一大步。 兔子的微博: https://weibo.com/u/6873517353?refer_flag=2313475010_&is_hot=1 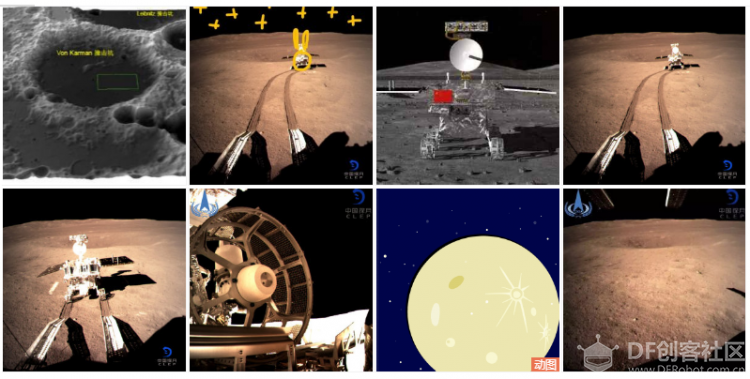 小兔子在对月球探索,这只是开始, 我们的征途是星辰大海! 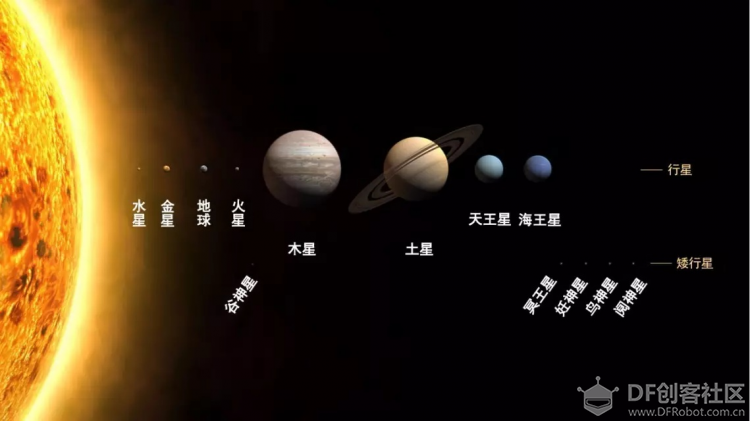 【以下故事纯属虚构,如有雷同,纯属巧合】 (帖子内容取材于大圣老师的教学,设计时借鉴了各位老师的教程。) 新的探月计划已经启动,更多月球车将登陆月球,建设月球基地。 “各位小朋友好,现在播报新闻,中国将在月背建立太空探测基地,现在正面向全国招募月球基地建设团队,欢迎小朋友报名参加。”  小麦出生后读到的第一本书就是《和星星做朋友》,在他的眼中,闪耀的星空那么令人向往。 所以听到消息的小麦们马上报名。 在等待通知的时间里,小麦更加热爱学习,和时间赛跑起来吧。 第一课任务: 勇往直前 要求麦昆能够在1.2米长(有更长桌面更好)的平坦桌面走直线0.8米,遇黑色胶带停车(不能跌落,注意防护)。 完成基本任务后,其它扩展任务(如灯光声音设置)自己设定。 软件准备: mind+http://mindplus.cc/index-chinese.html  硬件准备: 麦昆3.0电源组合版https://www.dfrobot.com.cn/goods.php?id=1906 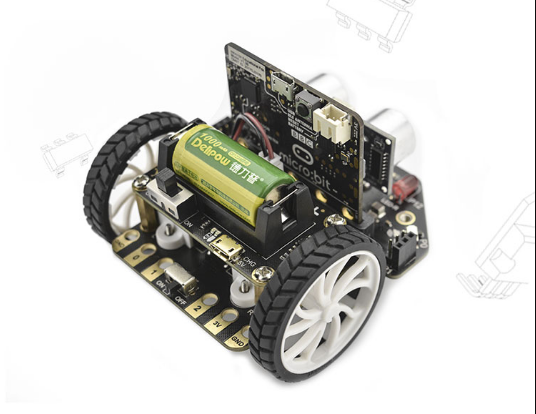 课堂计划: 1、课程导入3’ 2、组装麦昆5’ 3、下达任务2’ 4、第一轮自主尝试15’ 5、总结反思与点拨5’ 6、第二轮自主尝试20’ 7、项目总结与分享10’ 8、自主扩展活动  小麦的星辰梦想,就要努力实现了。 学习强国。 冲鸭—— 小兔子,月背见。 注:参与课程的小朋友学习过一学期的micro:bit及造物粒子。  好吧,上了一小节课,引导小朋友探讨。 开始时,都是用前进来做的,很显然不容易走直。  引导小朋友探索,左右电机转动速度与力量的关系。 运用变量来调节一个轮子的速度。 基本达到走直线的目标。 改进程序: 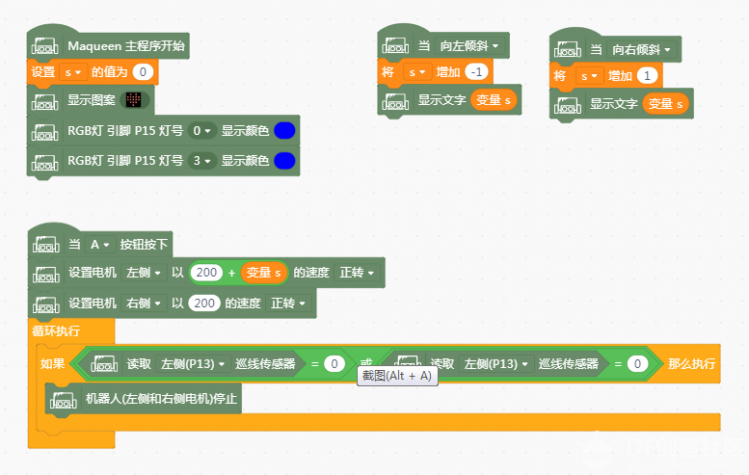 改进程序: 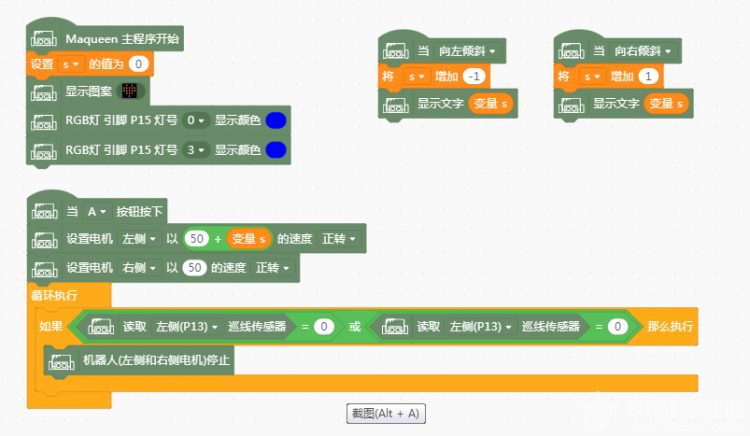 上面和程序上电后只能运行一次。 修改后,而且50的速度更加不易冲过黑线: 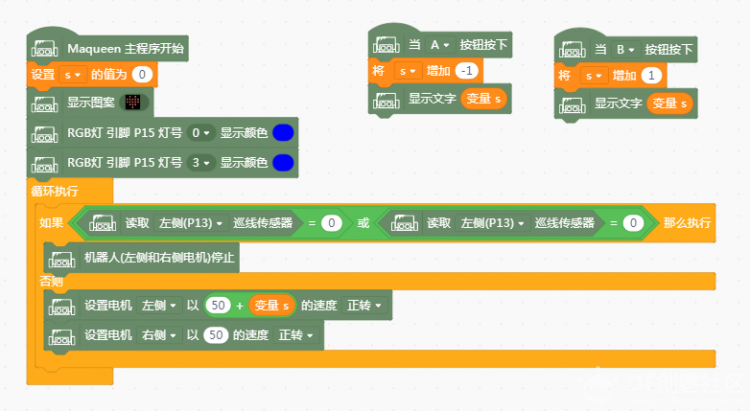 课后反思: 这一课编程难度并不大,引导一下小朋友可以完成任务。 但是并不太好玩,要走直影响因素较多,要有耐心的调整还并不完美,所以这一课设计的并不很好。 (没有编码电机,也不能PID什么的,走直很难。) 相关资料: 由于“潮汐锁定”效应,月球绕地球公转与自转的周期相同(都是27天7小时43分11.47秒),人类在地球上看到的月球永远是半个月亮,哪怕是几亿年以前的恐龙,它们看到的月亮也是这半个月亮,我们从来都看不到月亮的那半边。而正是这种未知,以及探知深部物质、了解月球演化的好奇心,驱使人类梦想着探求月球背面的故事。 2019年1月3日,探测器嫦娥四号降落在月球对该盆地进行探测,有助于研究月壳和月幔的组成、月球的地质特征、起源和演化现象。 冯·卡门撞击坑 2019年1月3日,人类首个在月球背面软着陆的探测器嫦娥四号稳稳降落在月球南极-艾特肯盆地冯·卡门撞击坑。嫦娥四号着陆区相当于嫦娥三号着陆区的八分之一,  且落区周围有海拔10公里高的山。不同于嫦娥三号在月球正面的着陆区,嫦娥四号在月球背面着陆区地形起伏达到6000米,可谓跌宕起伏、险象环生。 冯·卡门撞击坑对于中国而言还有另一层非凡的意义:它是以20世纪匈牙利裔美国航天工程学家冯·卡门命名的,他被誉为“航空航天时代的科学奇才”。 嫦娥四号落月 2004年1月中国月球探测工程全面启动,嫦娥探月已经走过了15年。 2015年,嫦娥四号才正式决定到月球背面着陆 2019年1月3日10时15分,嫦娥四号迎来制动时刻,7500牛发动机开机,动力下降开始; 10时21分,降落相机开机,开始抓拍落月全过程; 10时25分,嫦娥四号转入悬停模式,随后不一会儿便转入避障模式。 10时26分24秒,经历了近700秒的落月过程。 |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









