|
6518| 1
|
[入门教程] 【SIOT】基于掌控板测加速值的科学探究 |

本帖最后由 rzegkly 于 2019-7-1 16:47 编辑  《超重和失重》是人民教育出版社高中《物理》必修1第四章牛顿运动定理的内容,当电梯启动或者制动时,小麦站在体重计上,观察体重计的读数怎么变化? 通过观察发现:“由于电梯加速上升时,m(g+a)>mg,人对电梯地板压力比人受到的重力大。 物体对支持物的压力(或对悬挂物的拉力)大于物体所受重力的现象。称为超重现象。 反之,由于电梯加速下降(或减速上升)时,加速度向下,与坐标轴的正方向相反,a是负值,所以m(g+a)<0.这时人对电梯地板压力比人受到的重力小,物体对支持物的压力(或对悬挂物的拉力)小于物体所受重力的现象。称为失重现象. 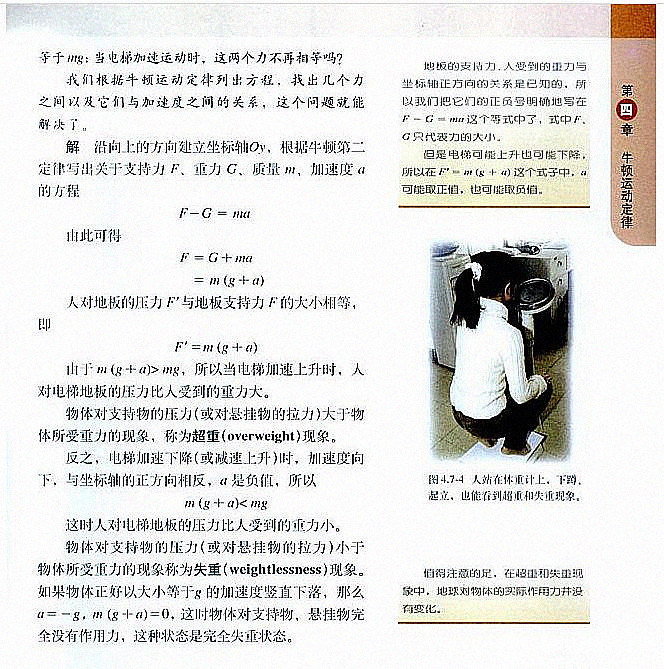 小麦虽然了解超重、失重的知识,但是坐电梯的实验很繁琐,数据无法得到,总觉得很抽象。今天,小麦化身一名物理教师,通过物联网SIOT,分享一节科学探究物理课。 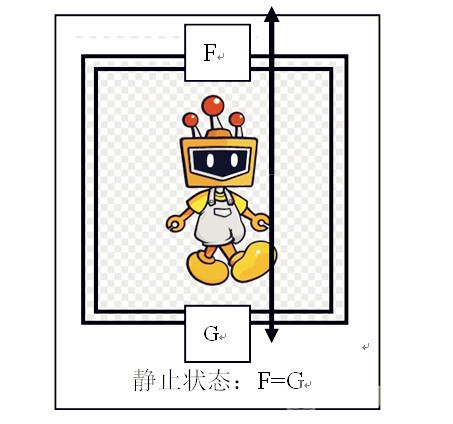 一、思路 利用SIoT建立本地服务器, 采用掌控板板载三轴加速计收集加速计数据,将数据通过中介MOTT Broker发布,在本地电脑上打开:http://127.0.0.1:8080/html,在"项目加速度/g"分析数据,将数据下载 ,分析不同时刻加速度值得大小,解释掌控板运动的超重失重现象。  二、环境 1、硬件: 掌控板 编程板 购买地址:https://www.dfrobot.com.cn/goods-1902.html 2、软件:Mind+ V1..5.5 下载地址:http://mindplus.cc/ 3、物联网服务器 SIoT v1.1 下载地址:https://siot.readthedocs.io/zh_CN/latest 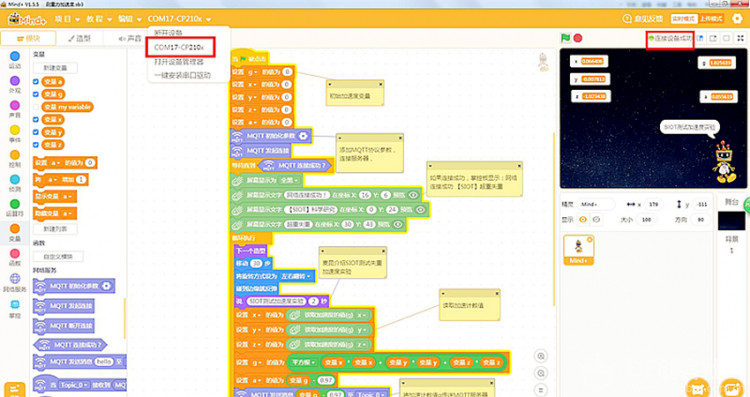  三、流 程: 1、通过数据线连接掌控板和计算机,用管理员模式打开Mind+1.5.5,将Mind+切换为“实时模式”下,连接设备,选择串口com17; 2、扩展模块中,添加主控板:掌控板 ;网络服务:MQTT 添加MQTT协议参数; 3、设置物联网平台数据:选择物联网SIOT; 服务器地址:192.168.1.2 账号:siot 密码:dfrobot 数据采集的对象:加速度/g; 用户名:加速度;设备名:g 如果连接成功,掌控板显示:网络连接成功 【SIOT】超重失重 将加速计数值g传送MQTT服务器设备列表加速度/g,消息监控中 掌控板显示:网络连接成功 【SIOT】超重失重 4、循环读取掌控板自由落体运动时加速计数值,将加速计数值g传送MQTT服务器设备列表加速度/g,消息监控中显示出来 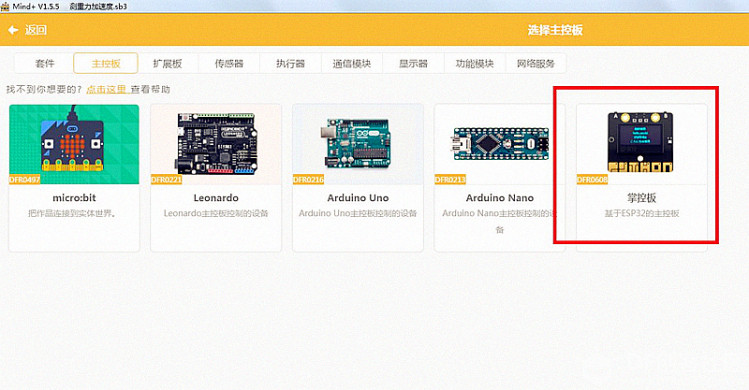 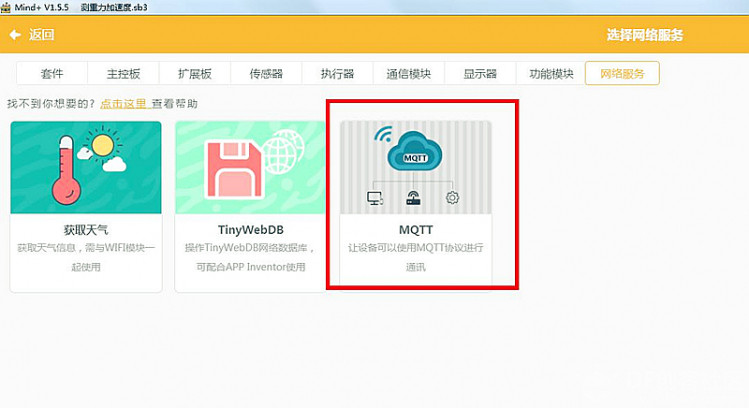  四、程序编写 1、背景选择:群星,角色:小麦 2、添加变量,初始加速度数值,x=0,y=0,z=0,g=0,a=0; 说明:变量x、y、z上的值分别代表掌控板的水平,垂直,侧方三个方向的加速数值。 变量g表示掌控板各种姿态所受加度数值,需要对重力在掌控板加速度传感器三个轴向上的分量进行矢量合成取模。因为3个轴向的加速度矢量两两正交,因此,计算检查到重力加速度g等于(x平方+y平方+z平方)再开方。 变量a表示掌控板运动时获得加速度大小的值 3、添加MQTT协议参数,连接服务器,如果连接成功,掌控板显示:网络连接成功 【SIOT】超重失重 4、循环读取掌控板自由落体运动时加速计数值,将加速计数值g传送MQTT服务器设备列表加速度/g,消息监控中显示出来  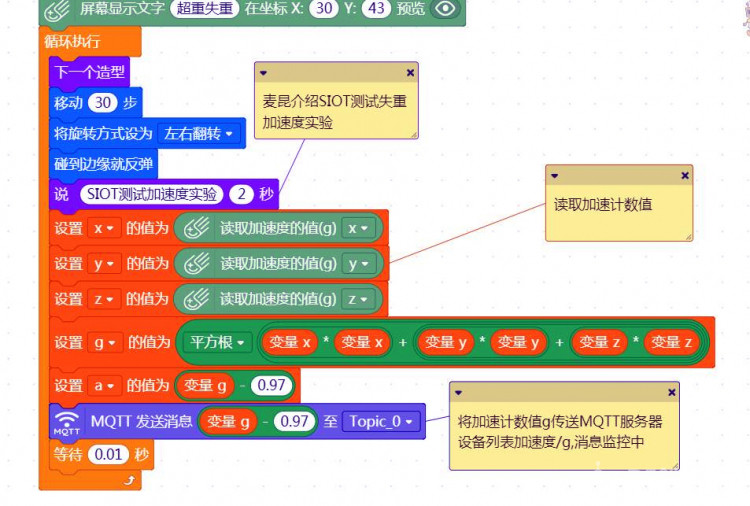 五、联网测试: 1、将数据线一端连接掌控板上,另一端连接电脑usb端口; 2、运行SIOT 服务器,在本电脑上打开http://127.0.0.1:8080/html,账号:siot 密码:dfrobot 3、 当松手时,竖着的掌控板进行自由落体运动,处于完全失重,由于数据线拉力的作用,发生弹性形变,掌控板再次被数据线拉起,直到掌控板处于静止状态。采集不同时间的加速度值,进而判断掌控板的运动状态;   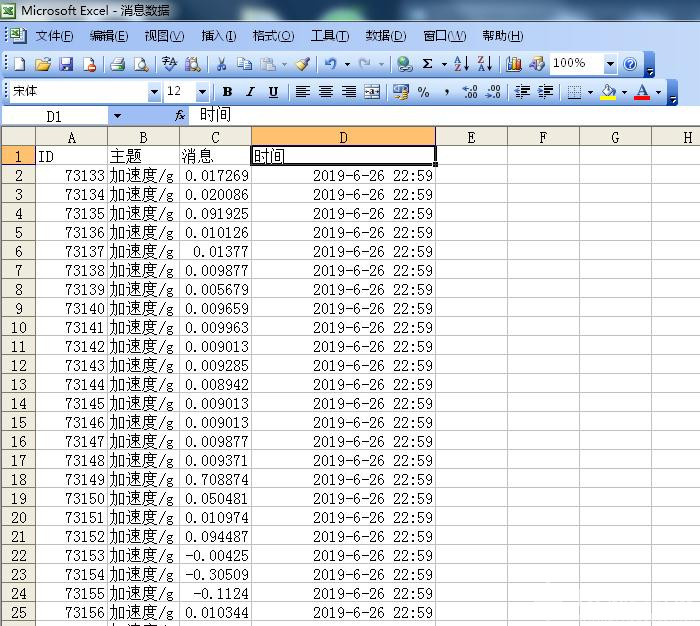 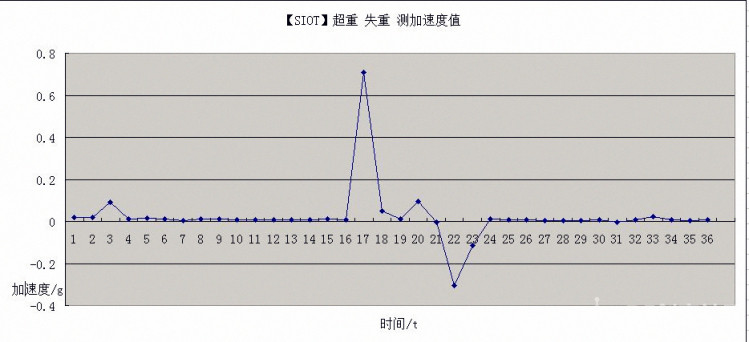 六、数据分析 1、横坐标表示掌控板自由下落后经过的时间(单位毫秒ms), 2、 纵坐标表示检测到掌控板自由落体时的加速度值(单位毫秒每二次方秒)。 通过对图表进行分析,我们将掌控板运动先后经历9个过程: 过程一:掌控板悬空,静止状态 F=G a=0 4—16ms 过程二:释放掌控板,受到地球引力,自由落体运动,掌控板完全失重状态,加速值0变为9.8 ;加速值a=9.8 ,16-17ms 过程三:掌控板受到绳子的拉力F和地球引力作用,向下加速运动,处于失重状态,加速值a<9.8 ,17ms—19ms 过程四:掌控板受到绳子的拉力F和地球引力作用,F=G,瞬间静止状态a=0, 19ms 过程五:掌控板受到绳子的拉力F和地球引力作用,向下减速运动,处于超重状态 ,a<9.8 19ms ---20ms 过程六:掌控板受到绳子的拉力F和地球引力作用,向上加速运动,处于超重状态, a<9.8 20ms ----21ms 过程七:掌控板受到绳子的拉力F和地球引力作用,F=G,瞬间静止状态a=0, 21ms 过程八:掌控板受到绳子的拉力F和地球引力作用,向上减速运动,处于失重状态 a<9.8 21ms------24ms 过程九:掌控板悬空,静止状态 F=G a=0 24ms—32ms 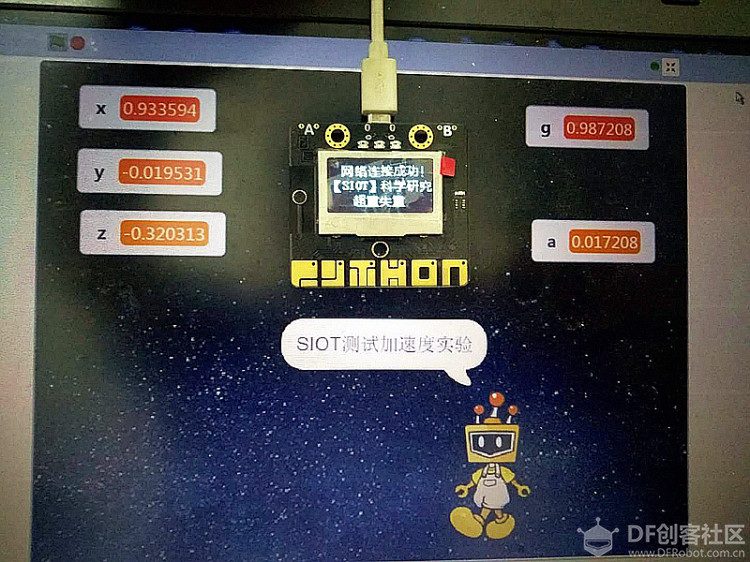 通过“基于掌控板测加速值的科学探究”,为学生创设相关的真实的情景,让学生思中学,用“数据探究”的方式去研究科学问题,分析物理现象,进而从物理计算升级为物联计算,让学生学习更有兴趣,让老师的教学变动更轻松! 七、知识拓展: SIoT为一个为教育定制的跨平台的开源MQTT服务器程序,S指科学(Science)、简单(simple)的意思。SIoT支持Win10、Win7、Mac、Linux等操作系统,一键启动,无需用户注册或者系统设置即可使用。 SIoT为“虚谷物联”项目的核心软件,是为了帮助中小学生理解物联网原理,并且能够基于物联网技术开发各种创意应用。因为其重点关注物联网数据的收集和导出,是采集科学数据的最好选择之一。 八、视频回放 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






