|
20886| 16
|
[项目] 玩转舵机 | 三轴机械臂(遥控版) |

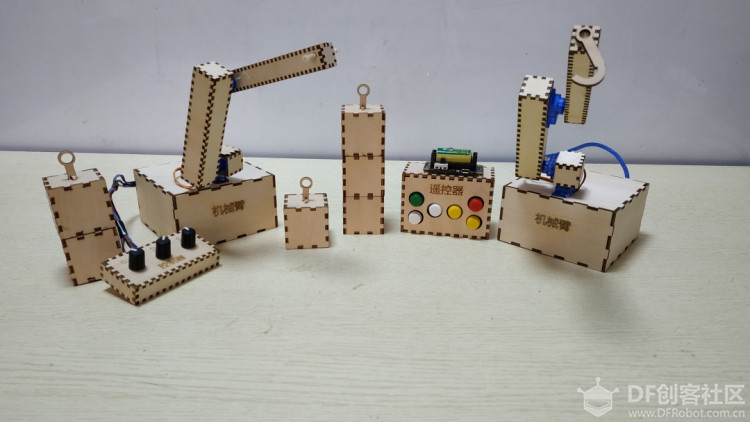 本项目可用来教孩子学习舵机的使用和“约束”积木的使用。 由于很多步骤和上一个项目相同,本文省略了部分制作步骤。 大家可以先看一看上一篇文章:玩转舵机 | 三轴机械臂 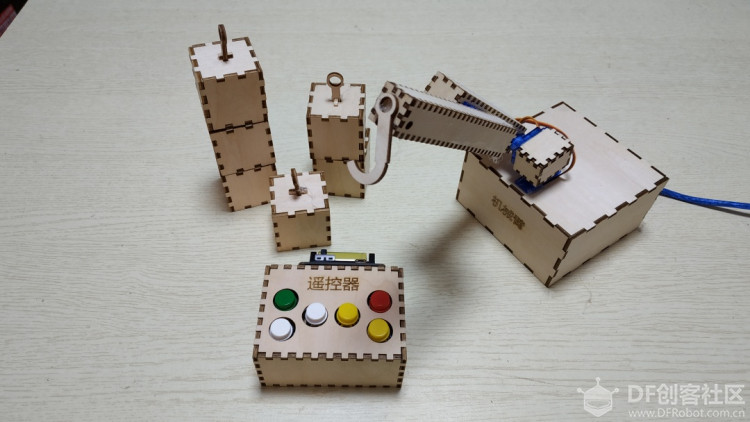 功能介绍 通过遥控器上相应的按钮,控制三个舵机角度的改变,从而实现左右、上下移动,以完成一些任务。 演示视频 制作过程 No.1 准备材料 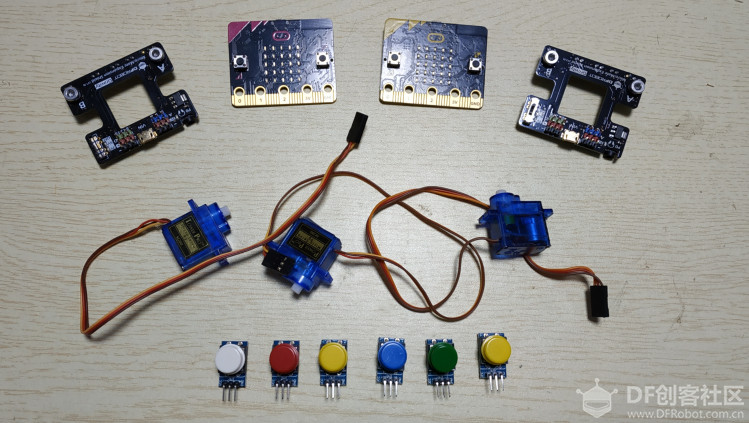 材料清单: Micro:bit 主控板 2块 DF Micro:Mate 扩展板 2块 数字开关 6个 180°舵机 3个 No.2 硬件搭建 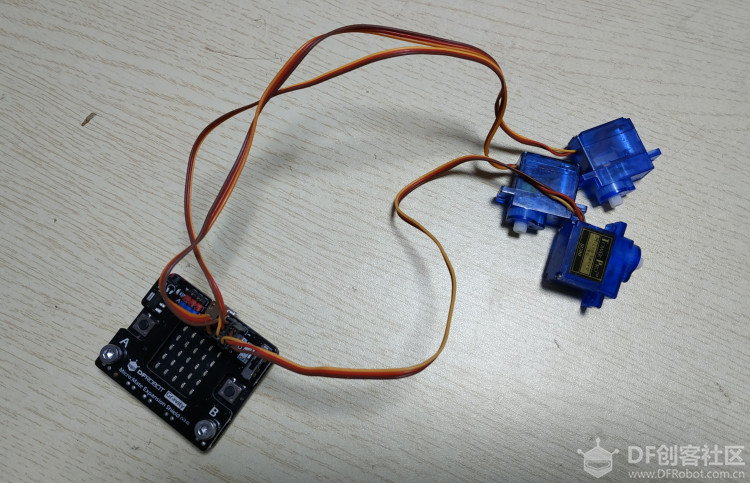 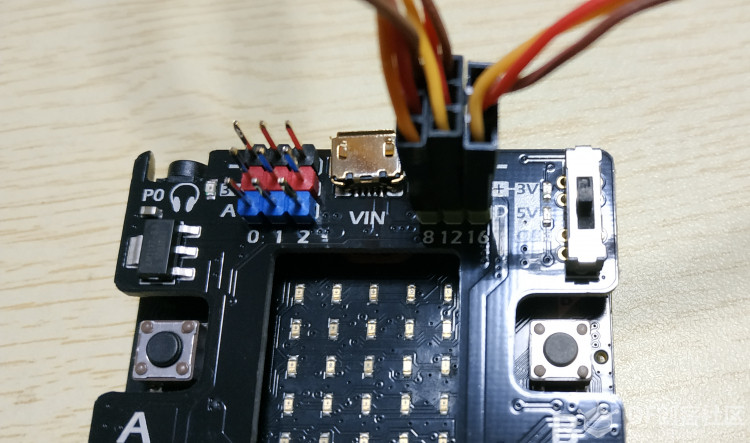 3个舵机分别接到P8、P12、P16引脚; 使用时,扩展板要切换为5V输出,电源线要直接插到扩展板的Mini-USB供电。 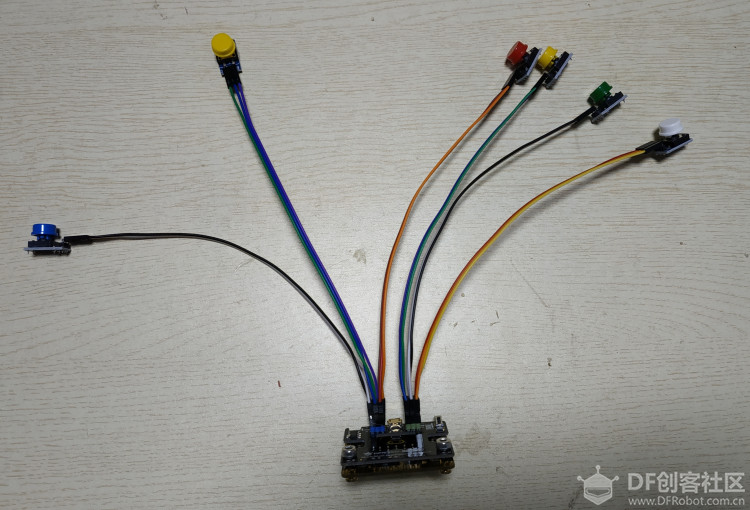 将6个数字开关分别接到另一块扩展板上的6个引脚(P0、P1、P2、P8、P12、P16) 因为数字开关在3.3V下也能工作,使用时选择主控板或者扩展板供电都可以。 No.3 编写程序 利用Mind+ V1.6.1编写程序。  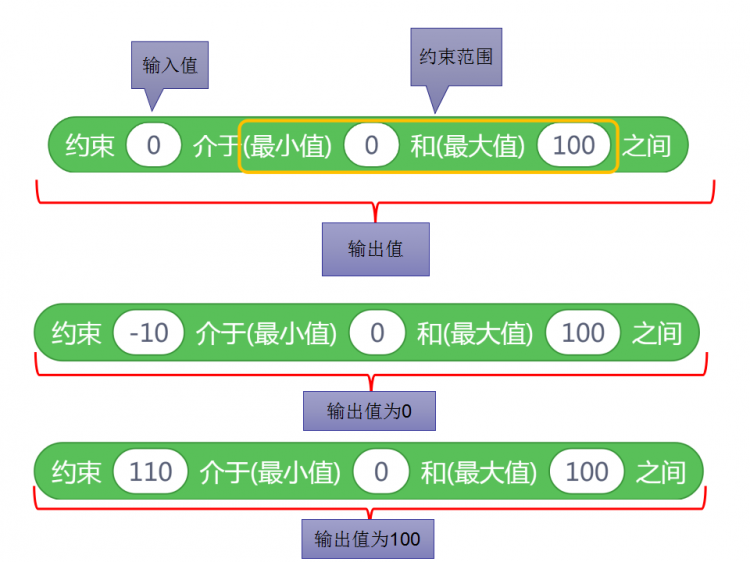 "约束"积木,在【运算符】模块内,其功能是将数值限定在一个指定范围内,如果数值大小超出指定范围则进行转换。例如:当指定范围为0~100时,如果输入值处于该范围内,则输出值等于输入值;如果输入值为-10,则转换为最小值0;如果输入值为110,则转换为最大值110。 在本项目中,需要将舵机角度值约束在0~180的范围内。 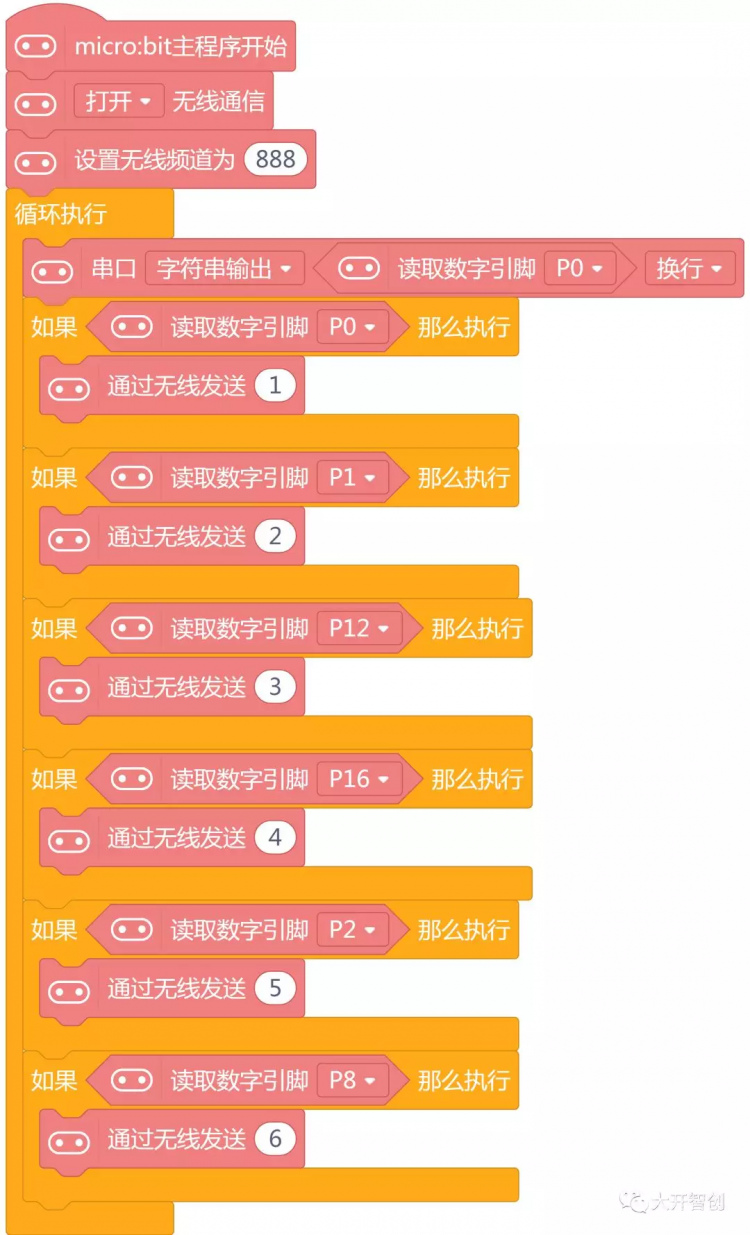  上面为遥控器程序,6个数字开关被按下时无线发送6个不同的信息即可。   上面为主程序,先建立了3个变量用于设置3个舵机的角度值。当收到不同的无线数据时,对相应的变量进行增减值操作,从而实现控制舵机角度的变化。 程序编好后,分别上传到主控板,进行测试。大家可以根据实际运行情况,进行一些参数的调整,比如收到无线数据后变量的增减幅度。 调试好后,你需要拔下舵机,以便与椴木件组合起来。 No.4 设计激光切割图纸  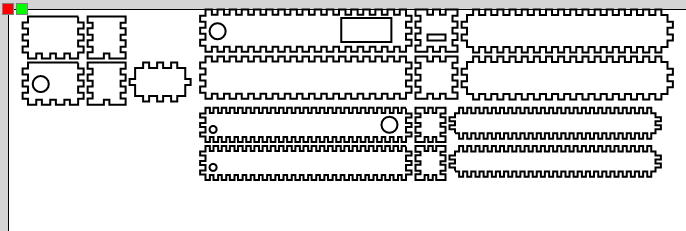 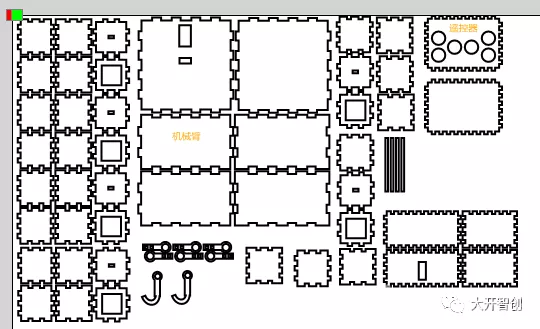 图纸较上一个版本做了一点点改变,没有了电位器的穿线口,增加了吊钩。 No.5 重置舵机的角度 参见上一个项目教程。 No.6 组装盒体 参见上一个项目教程。 No.7 安装第2个舵机 参见上一个项目教程。 No.8 安装第1段臂体 参见上一个项目教程。 No.9 安装第2段臂体 参见上一个项目教程。 No.10 组装遥控器  组装好遥控器的盒体 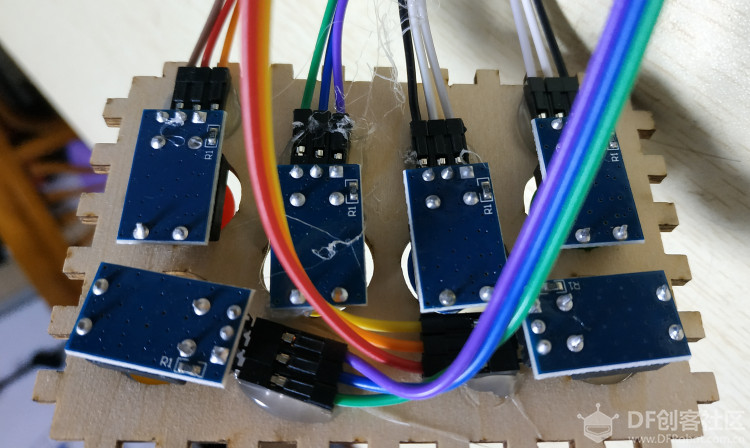 将6个数字开关固定在顶板上,要根据所接引脚合理分布 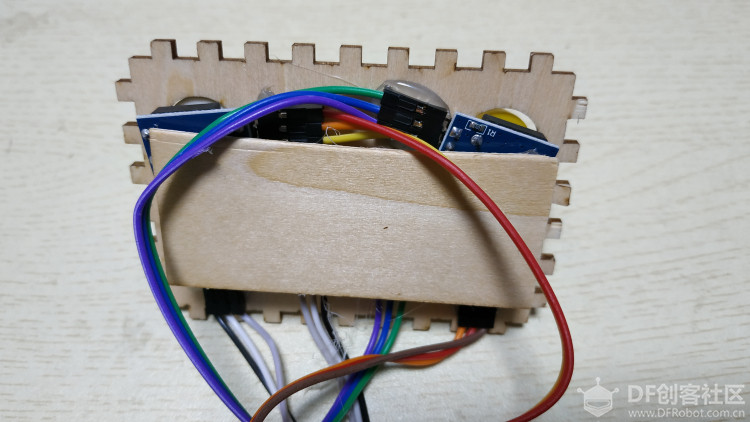 再加上一块木板进行加固和隔离 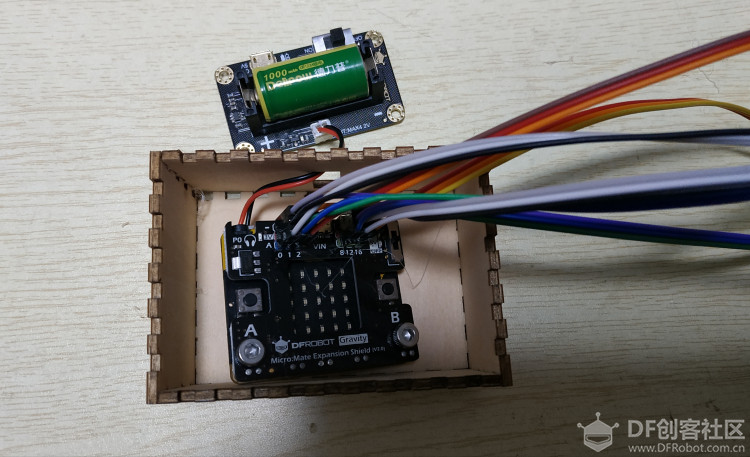 插上电池(接主控板JST口)  盖上顶板 No.11 组装任务盒子 参见上一个项目教程。 No.12 重新上传程序并调试 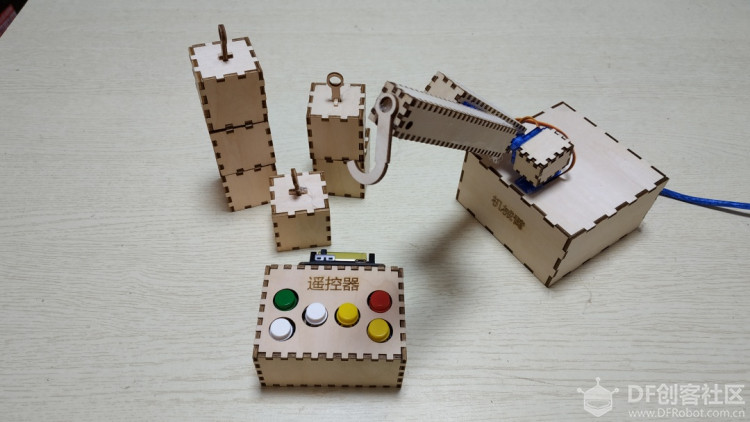 将程序重新上传到主控板,再次调试。 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








