|
13579| 4
|
[入门] 【在 Arduino 上使用机器学习】(三)在Arduino上使用自定义... |

|
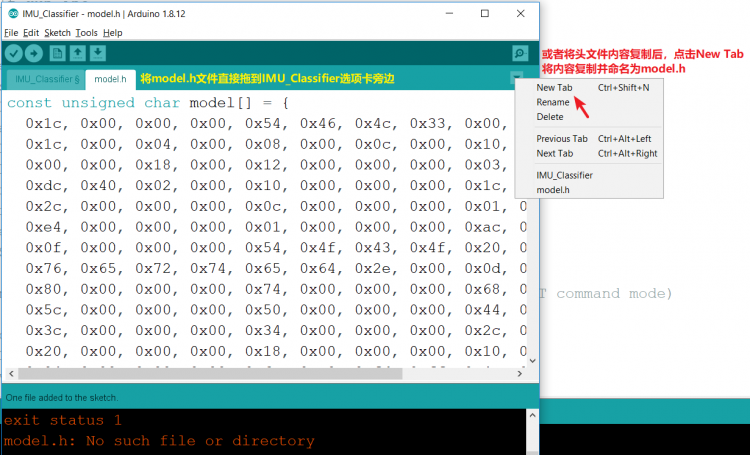
【在 Arduino 上使用机器学习】(一)在 Arduino 开发板上安装库及添加测试样本 【在 Arduino 上使用机器学习】(二)Tensorflow上构建及训练模型 【在 Arduino 上使用机器学习】(三)在Arduino上使用自定义手势识别模型 在Arduino上使用自定义手势识别模型 接下来,我们会将刚刚在上一节中在 Colab 中训练并下载的 model.h 文件,用于我们的 Arduino IDE 项目中:
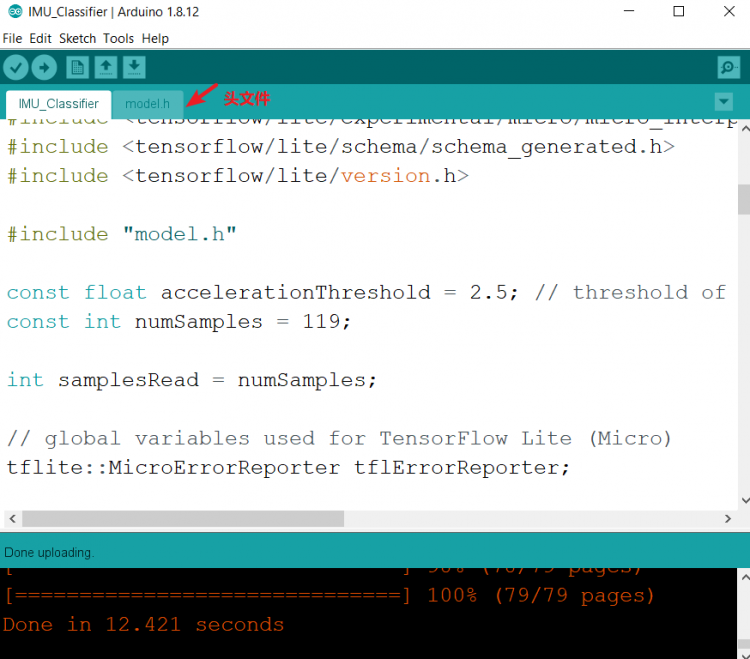
将例程上传到板子中,打开串口监视器,做一些手势,发现几乎所有的手势被识别为曲肘(见下图),无论是击拳还是曲肘。仔细思考了一下发现了问题。原来训练的时候对“击拳”理解错误,以为是像武林高手一样击出去要收回来。实际上击拳只是将拳挥出去,收回的时候要非常缓慢,以免触发采样。同样曲肘也是,将手臂缓缓伸出,然后迅速收回,收回这个动作才是“曲肘”。 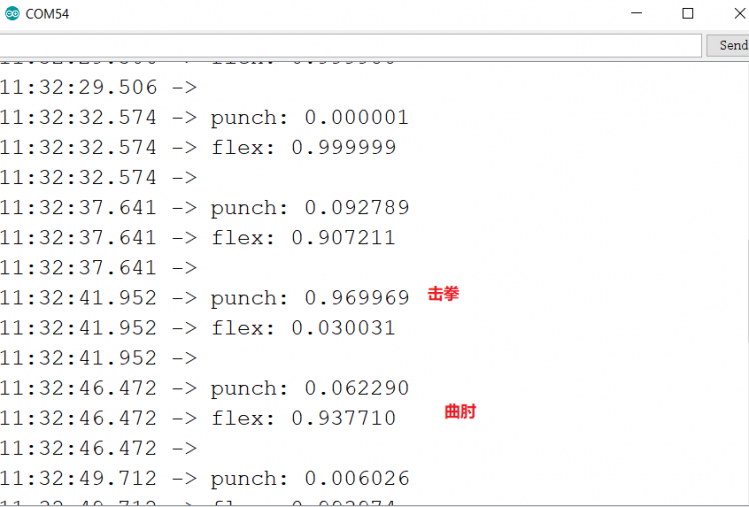 出现这个错误,需要重新采集样本。下面的动图是新采集的样本,可以看到两个动作之间区别还是很大的: 好在前面走了一遍,后来就非常顺利了。分别采集10个击拳和10个曲肘的动作样本。再回到colab里进行训练,重新下载model.h文件。将原来的文件删除: 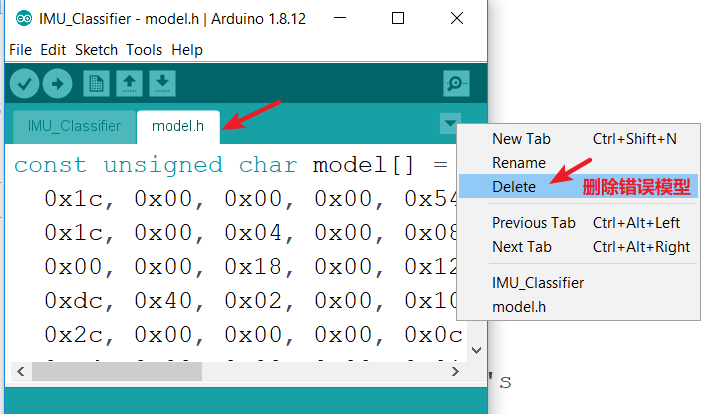 重新上传文件并使用串口监视器观察,开始击拳和曲肘的动作,识别的非常准备:  采样率是每秒119HZ,每秒采集119个样本,做10次动作可以采集1190个样本,样本量还是比较高的。为了样本的准确性,动作一定要标准,否则预测结果会不理想。 数字代表置信度,置信度越高,所预测的动作可能性越大。最后预测的结果与实际动作完全一致。 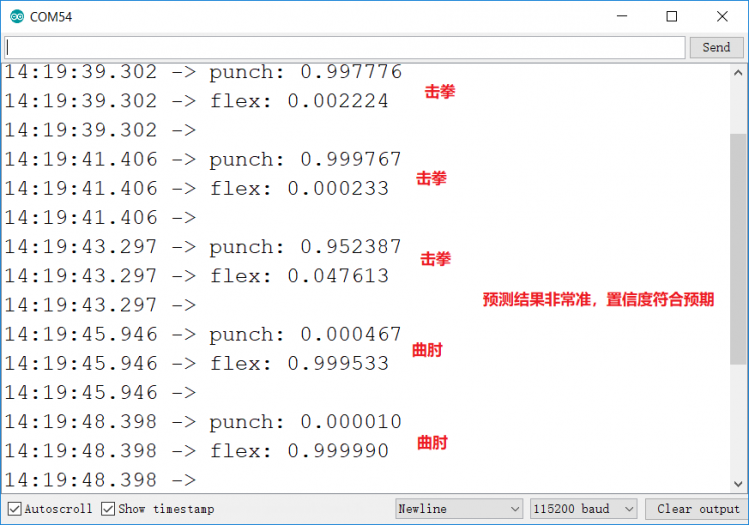 教程参考: "想获得更多乐趣?您可使用 Emoji_Button.ino 示例创建 USB 键盘,在 Linux 和 macOS 中输出表情符号字符。尝试将 Emoji_Button.ino 示例与 IMU_Classifier.ino 例程相结合,创建手势控制的表情符号键盘 。" 如果您想详细了解 本文提及 的相关内容,请参阅以下文档。这些文档深入探讨了这篇文章中提及的许多主题:
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 版主限定
版主限定
 创作达人
创作达人
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 星球译员
星球译员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






