|
6158| 1
|
[项目] 【智控万物】懒人系列之视控灯 |
|
【智控万物】懒人系列之视控灯  (演示:视频识别控制Microbit) 【项目背景】 "视控灯"这个名字来自“声控灯”,在公共场所,有人需要临时开灯。如楼道、卫生间等等。声控灯实现起来很简单,应用比较普遍。声控是它的优势但也存在一个很大的问题。因为只有声音超过一定响度时,灯才亮。这也就出现了有人在楼门口大声咳嗽,使劲跺脚。同时也发生在楼道里,不方便自己的同时,也产生了噪音,尤其是在深夜,你的大呵一声,惊扰四邻。 【设计方案】 1、现在使用的是电脑作为识别工具,后期条件成熟准备使用树莓派,因Python在树莓派也能实现相应功能。 2、使用Python来处理摄像头图像,代码简单,本地运行速度快。识别响应阈值可自定义。 3、CodeLab Scratch3+CodeLab Adapter+Python完美搭配。以前我要实现类似功能,要通过一个中间者MQTT,比如本地的像Siot。 【准备工作】 【制作过程】 1、只使用Python进行测试 《演示视频》 [mw_shl_code=python,false]#识别画面异动 import imutils,cv2,time camera = cv2.VideoCapture(0) framefirst=None avg=None num=0 j=0 while True: (grabbed, frame) = camera.read() # 如果不能抓取到一帧,说明我们到了视频的结尾 if not grabbed: break # 调整该帧的大小,并且对其进行高斯模糊 frame = imutils.resize(frame, width=500) imageold=frame.copy() #转换为灰阶图像 gray = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY) #高斯模糊 这里(21, 21)表示高斯矩阵的长与宽都是5, #标准差取0时OpenCV会根据高斯矩阵的尺寸自己计算。概括地讲,高斯矩阵的尺寸越大,标准差越大,处理过的图像模糊程度越大。 gray = cv2.GaussianBlur(gray, (21, 21), 0) if framefirst is None : framefirst=gray continue if avg is None: avg = gray.copy().astype("float") continue #图像叠加or图像混合加权实现 #cv2.addWeighted(src1, alpha, src2, beta, gamma[, dst[, dtype]]) → dst #dst = src1 * alpha + src2 * beta + gamma; cv2.accumulateWeighted(gray, avg, 0.5) gray = cv2.absdiff(gray, cv2.convertScaleAbs(avg)) # 二值化处理,即黑白的(不是灰度图),所以读取的图像要先转成灰度的,再转成二值图 , #像素高于阈值时,给像素赋予新值,否则,赋予另外一种颜色。函数是cv2.threshold() ret, binary = cv2.threshold(gray,5,255,cv2.THRESH_BINARY) #学习不同的形态学操作,例如腐蚀,膨胀,开运算,闭运算等 #我们要学习的函数有:cv2.erode(),cv2.dilate(),cv2.morphologyEx()等 #与卷积核对应的原图像的像素值中只要有一个是1,中心元 素的像素值就是1。所以这个操作会增加图像中的白色区域(前景)。 #一般在去噪声时先用腐蚀再用膨胀。因为腐蚀在去掉白噪声的同时,也会使前景对象变小。 #所以我们再对他进行膨胀。这时噪声已经被去除了,不会再回来了,但是前景还在并会增加。膨胀也可以用来连接两个分开的物体。 thresh = cv2.dilate(binary, None, iterations=2) #binary:寻找轮廓的图像 #轮廓的检索模式:cv2.RETR_EXTERNAL表示只检测外轮廓 #cv2.RETR_TREE建立一个等级树结构的轮廓。 #cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息 contours, hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE) #第一个参数是指明在哪幅图像上绘制轮廓; #第二个参数是轮廓本身,在Python中是一个list。 #第三个参数指定绘制轮廓list中的哪条轮廓,如果是-1则绘制其中的所有轮廓。 #thickness表明轮廓线的宽度,如果是-1(cv2.FILLED),则为填充模式。 # cv2.drawContours(frame,contours,-1,(0,0,255),3) for c in contours: # if the contour is too small, ignore it if cv2.contourArea(c) < 5000: continue # 计算轮廓线的外框, 在当前帧上画出外框, # 并且更新文本 (x, y, w, h) = cv2.boundingRect(c) cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2) num+=1 if num>20 : print('有异动') num=0 cv2.imshow("contours", frame) #cv2.imshow("Gray", gray) #cv2.imshow("binary", binary) key = cv2.waitKey(1) & 0xFF # 如果q键被按下,跳出循环 if key == ord("q"): break # 清理摄像机资源并关闭打开的窗口 camera.release() cv2.destroyAllWindows()[/mw_shl_code] 2、CodeLab Scratch3+CodeLab Adapter+Python,暂未控灯 《演示视频》 [mw_shl_code=python,false]import time import imutils,cv2 from loguru import logger from codelab_adapter_client import AdapterNode class EIMNode(AdapterNode): def __init__(self): super().__init__() self.NODE_ID = "eim" def send_message_to_scratch(self, content): message = self.message_template() message["payload"]["content"] = content self.publish(message) def extension_message_handle(self, topic, payload): self.logger.info(f'the message payload from scratch: {payload}') content = payload["content"] if type(content) == str: content_send_to_scratch = content[::-1] # 反转字符串 self.send_message_to_scratch(content_send_to_scratch) def run(self): camera = cv2.VideoCapture(0) framefirst=None avg=None num=0 j=0 while self._running: (grabbed, frame) = camera.read() # 如果不能抓取到一帧,说明我们到了视频的结尾 if not grabbed: break # 调整该帧的大小,并且对其进行高斯模糊 frame = imutils.resize(frame, width=500) imageold=frame.copy() #转换为灰阶图像 gray = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY) #高斯模糊 这里(21, 21)表示高斯矩阵的长与宽都是5, #标准差取0时OpenCV会根据高斯矩阵的尺寸自己计算。概括地讲,高斯矩阵的尺寸越大,标准差越大,处理过的图像模糊程度越大。 gray = cv2.GaussianBlur(gray, (21, 21), 0) if framefirst is None : framefirst=gray continue if avg is None: avg = gray.copy().astype("float") continue #图像叠加or图像混合加权实现 #cv2.addWeighted(src1, alpha, src2, beta, gamma[, dst[, dtype]]) → dst #dst = src1 * alpha + src2 * beta + gamma; cv2.accumulateWeighted(gray, avg, 0.5) gray = cv2.absdiff(gray, cv2.convertScaleAbs(avg)) # 二值化处理,即黑白的(不是灰度图),所以读取的图像要先转成灰度的,再转成二值图 , #像素高于阈值时,给像素赋予新值,否则,赋予另外一种颜色。函数是cv2.threshold() ret, binary = cv2.threshold(gray,5,255,cv2.THRESH_BINARY) #学习不同的形态学操作,例如腐蚀,膨胀,开运算,闭运算等 #我们要学习的函数有:cv2.erode(),cv2.dilate(),cv2.morphologyEx()等 #与卷积核对应的原图像的像素值中只要有一个是1,中心元 素的像素值就是1。所以这个操作会增加图像中的白色区域(前景)。 #一般在去噪声时先用腐蚀再用膨胀。因为腐蚀在去掉白噪声的同时,也会使前景对象变小。 #所以我们再对他进行膨胀。这时噪声已经被去除了,不会再回来了,但是前景还在并会增加。膨胀也可以用来连接两个分开的物体。 thresh = cv2.dilate(binary, None, iterations=2) #binary:寻找轮廓的图像 #轮廓的检索模式:cv2.RETR_EXTERNAL表示只检测外轮廓 #cv2.RETR_TREE建立一个等级树结构的轮廓。 #cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息 contours, hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE) #第一个参数是指明在哪幅图像上绘制轮廓; #第二个参数是轮廓本身,在Python中是一个list。 #第三个参数指定绘制轮廓list中的哪条轮廓,如果是-1则绘制其中的所有轮廓。 #thickness表明轮廓线的宽度,如果是-1(cv2.FILLED),则为填充模式。 # cv2.drawContours(frame,contours,-1,(0,0,255),3) for c in contours: # if the contour is too small, ignore it if cv2.contourArea(c) < 5000: continue # 计算轮廓线的外框, 在当前帧上画出外框, # 并且更新文本 (x, y, w, h) = cv2.boundingRect(c) cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2) num+=1 if num>20 : self.send_message_to_scratch('有异动') print('有异动') num=0 cv2.imshow("contours", frame) #cv2.imshow("Gray", gray) #cv2.imshow("binary", binary) key = cv2.waitKey(1) & 0xFF # 如果q键被按下,跳出循环 if key == ord("q"): break # 清理摄像机资源并关闭打开的窗口 camera.release() cv2.destroyAllWindows() if __name__ == "__main__": try: node = EIMNode() node.receive_loop_as_thread() node.run() except KeyboardInterrupt: node.terminate() # Clean up before exiting.[/mw_shl_code] 3、CodeLab Scratch3加入Usb Microbit控制 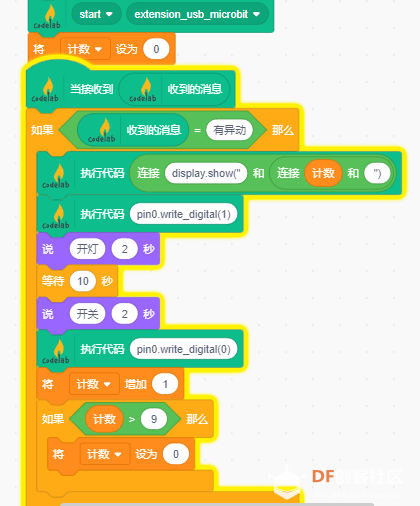 演示视频(不接电磁继电器和灯),直接用Microbit点阵灯演示 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






