|
2434| 2
|
[M10项目] 行空板M10扩展板——行空智能跟随垃圾桶 |

|
本帖最后由 云天 于 2025-6-30 10:54 编辑 【项目背景】 在日常生活中,打扫卫生时常常需要频繁移动垃圾桶,这给使用者带来了诸多不便。为了解决这一问题,我计划设计一个行空智能跟随垃圾桶,它能够在听到我的呼唤后自动跟随我,方便我在打扫过程中随时使用。经过研究和尝试,我选择了在行空板M10上安装Snowboy库进行离线语音唤醒,并使用OpenCV进行人体检测,同时借助硅基流动平台的图像理解大模型进行图像分析,以实现这一功能。 【项目设计】 我将设计一个行空智能跟随垃圾桶,其主要功能如下: 离线语音唤醒:通过安装在行空板M10上的Snowboy库,垃圾桶能够离线识别我的唤醒词,“你好小云”,并迅速做出响应。 人体检测与图像分析:垃圾桶会旋转并使用OpenCV进行人体检测,若未检测到人体,则旋转一定角度(90度)再次检测,直至回到起点。一旦检测到人体,垃圾桶会将照片上传至硅基流动平台进行图像分析,判断是否有人拿着打扫工具。 自动跟随与避障:如果发现有人拿着打扫工具,垃圾桶会驱动电机前进,并通过超声波传感器测量与人的距离,当距离达到30cm时自动停止,确保在打扫室内卫生时能够方便地跟随使用者。 【制作步骤】 1.安装依赖库 sudo apt-get install python-pyaudio python3-pyaudio swig 2.下载代码 3.安装puaduio库 sudo pip3 install pyaudio 4.生成个人唤醒词模型 网址https://snowboy.hahack.com/,方法:记录3个唤醒词示例,并将其提交以生成.pmdl文件。 (1)启用麦克风(Chrome需要) (2)单击录制并等待准备就绪 (3)说出你的醒语,等待结束 (4)重复,直到你有3个例子 (5)输入模型名称,提交音频,然后单击“保存模型”按钮 (6)下载模型 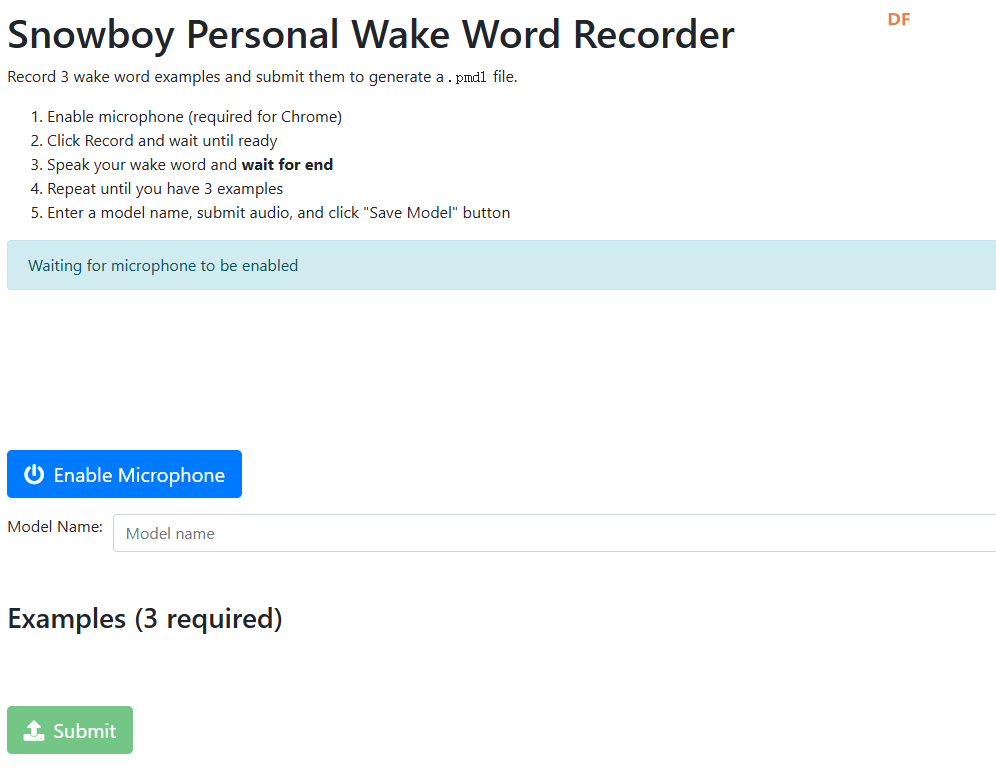 5.将模型上传到行空板 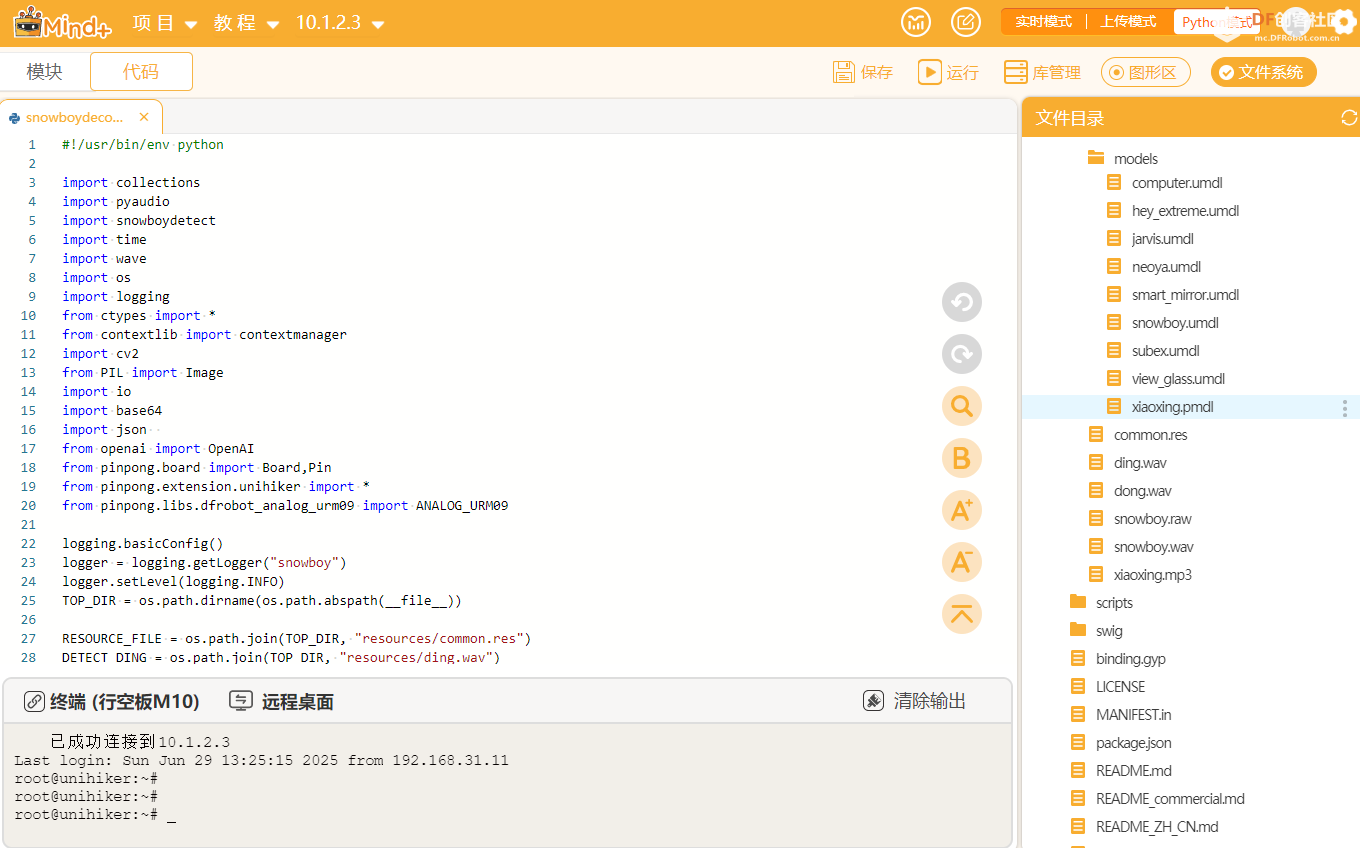 【代码编写】 1.修改snowboy/examples/demo.py代码,实现直接加载指定唤醒词模型 #if len(sys.argv) == 1: # print("Error: need to specify model name") # print("Usage: python demo.py your.model") # sys.exit(-1) #model = sys.argv[1] model = "/root/snowboy/resources/models/xiaoxing.pmdl" 2.修改snowboy/examples/demo.py/snowboydecoder.py文件,实现人体检测、图像分析、电机驱动。 (1)加载语音提醒,“我在呢”,“看到你了,我来了” DETECT_Hello = os.path.join(TOP_DIR, "resources/xiaoxing.wav") DETECT_COME = os.path.join(TOP_DIR, "resources/come.wav") (2)使用OpenCV的Haar 检测器,进行人体检测。如检测到人体将此图像进行Base64编码。 import cv2 # 加载 Haar 检测器 face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml') def camera(): global bs,cap if bs==0: # 打开摄像头 cap = cv2.VideoCapture(0) # 参数 0 表示使用默认摄像头 if not cap.isOpened(): print("无法打开摄像头") return -1 bs=1 # 读取一帧 ret, frame = cap.read() if not ret: print("无法读取帧") return 0 # 检测行人 # 转换为灰度图 gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 检测人脸 faces = face_cascade.detectMultiScale(gray, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30)) # 判断是否有人 if len(faces) > 0: play_audio_file(DETECT_DING) print("有人") # 将 OpenCV 的 BGR 图像转换为 PIL 的 RGB 图像 frame_rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB) pil_image = Image.fromarray(frame_rgb) # 转换为 Base64 编码 base64_image = convert_image_to_webp_base64(pil_image) if base64_image: print("Base64 编码成功!") # 在这里可以处理 Base64 编码的字符串,例如打印或发送到服务器 print(base64_image[:20]) # 打印前 100 个字符作为示例 Vlcontent=QwenVL(base64_image) print(Vlcontent) if "是" in Vlcontent: play_audio_file(DETECT_COME) print("yes") return 1 else: print("no") return 0 else: print("Base64 编码失败!") return 0 else: play_audio_file(DETECT_DONG) print("无人") return 0 def convert_image_to_webp_base64(image): """ 将图像对象转换为 WebP 格式的 Base64 编码字符串。 :param image: PIL.Image 对象 :return: Base64 编码字符串 """ try: byte_arr = io.BytesIO() image.save(byte_arr, format='webp') byte_arr = byte_arr.getvalue() base64_str = base64.b64encode(byte_arr).decode('utf-8') return base64_str except IOError: print("Error: Unable to convert the image to WebP Base64") return None (3)使用硅基流动的图像理解大模型,进行图像分析,检测是否有人拿着打扫工具。 def QwenVL(base64_url): response = client.chat.completions.create( model="Qwen/Qwen2-VL-72B-Instruct", messages=[ { "role": "user", "content": [ { "type": "image_url", "image_url": { "url": "data:image/jpg;base64,"+base64_url } }, { "type": "text", "text": "请看一下这张图像中,如果有一个人手中拿着打扫工具,请回复是,否则回复否。" } }], stream=False ) return response.choices[0].message.content (4)唤醒后,控制电机转向并检测,识别到目标,驱动电机前进,并利用超声传感器测距。 def play_audio_file(fname=DETECT_Hello): """Simple callback function to play a wave file. By default it plays a Ding sound. :param str fname: wave file name :return: None """ ding_wav = wave.open(fname, 'rb') ding_data = ding_wav.readframes(ding_wav.getnframes()) with no_alsa_error(): audio = pyaudio.PyAudio() stream_out = audio.open( format=audio.get_format_from_width(ding_wav.getsampwidth()), channels=ding_wav.getnchannels(), rate=ding_wav.getframerate(), input=False, output=True) stream_out.start_stream() stream_out.write(ding_data) time.sleep(0.2) stream_out.stop_stream() stream_out.close() audio.terminate() if fname==DETECT_Hello: print("已唤醒") for i in range(4): j=camera() if j==0: #转向 turn(1,800) time.sleep(0.3) stop() time.sleep(4) continue else: break if j==1: print("前进") #前进 while True: print(urm091.distance_cm()) if urm091.distance_cm()>30: goahead(1,800) else: stop() break (5)电机驱动 def goahead(direction,PWM): p_p23_pwm.write_analog(PWM) p_p24_out.write_digital(direction) p_p9_out.write_digital(direction) p_p21_pwm.write_analog(PWM) p_p1_out.write_digital(1-direction) p_p4_out.write_digital(1-direction) def turn(direction,PWM): p_p23_pwm.write_analog(PWM) p_p24_out.write_digital(direction) p_p9_out.write_digital(direction) p_p21_pwm.write_analog(PWM) p_p1_out.write_digital(direction) p_p4_out.write_digital(direction) def stop(): p_p23_pwm.write_analog(0) p_p21_pwm.write_analog(0) 【硬件组装】 1.底盘使用麦克纳姆轮,两个两路电机驱动,两节锂电池供电。 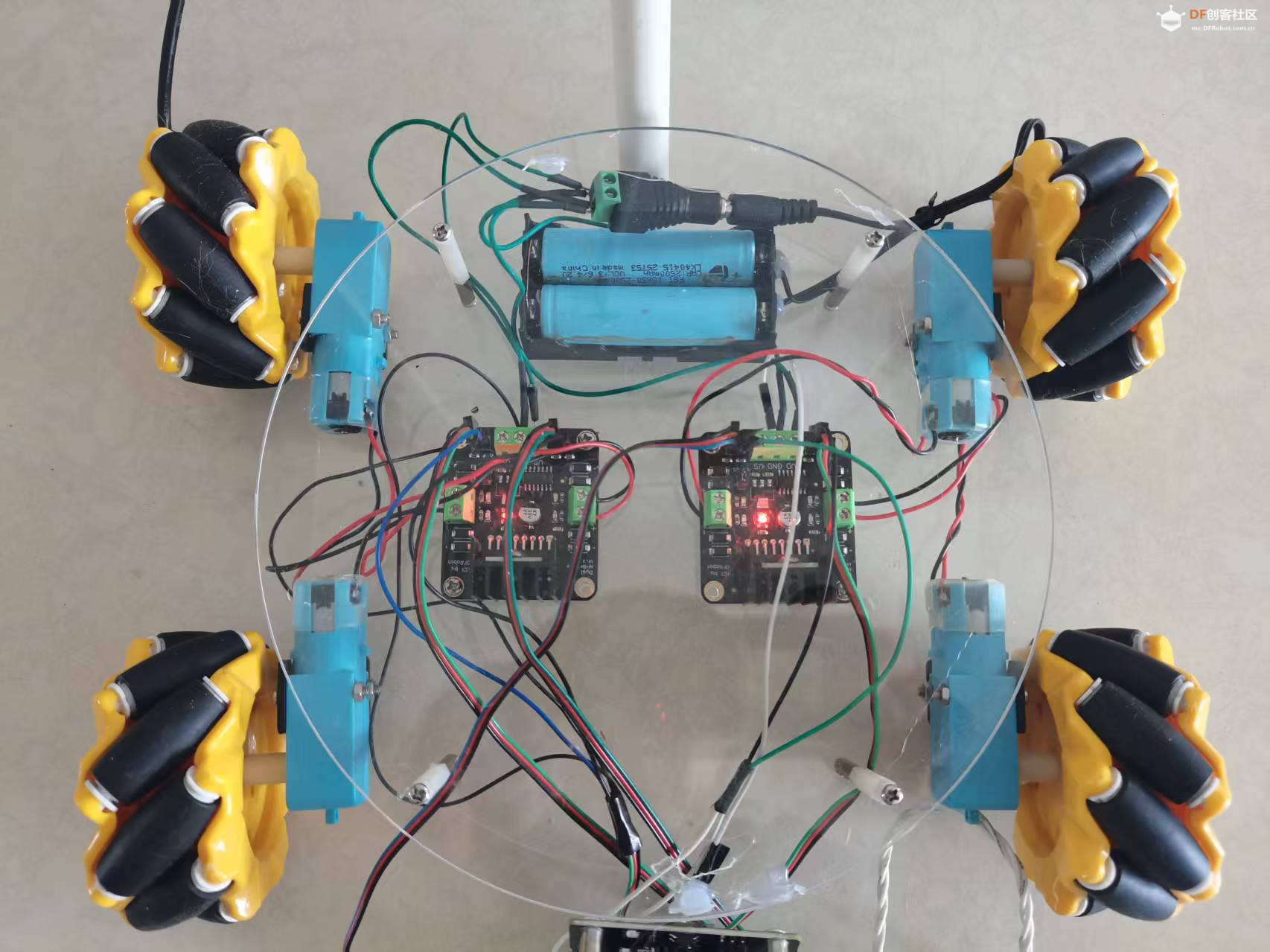 2.使用行空板M10及扩展上的相应引脚(代码中有设置),连接电机驱动、超声波传感器。因使用了独立的电机驱动,扩展板上的电机驱动引脚未使用。 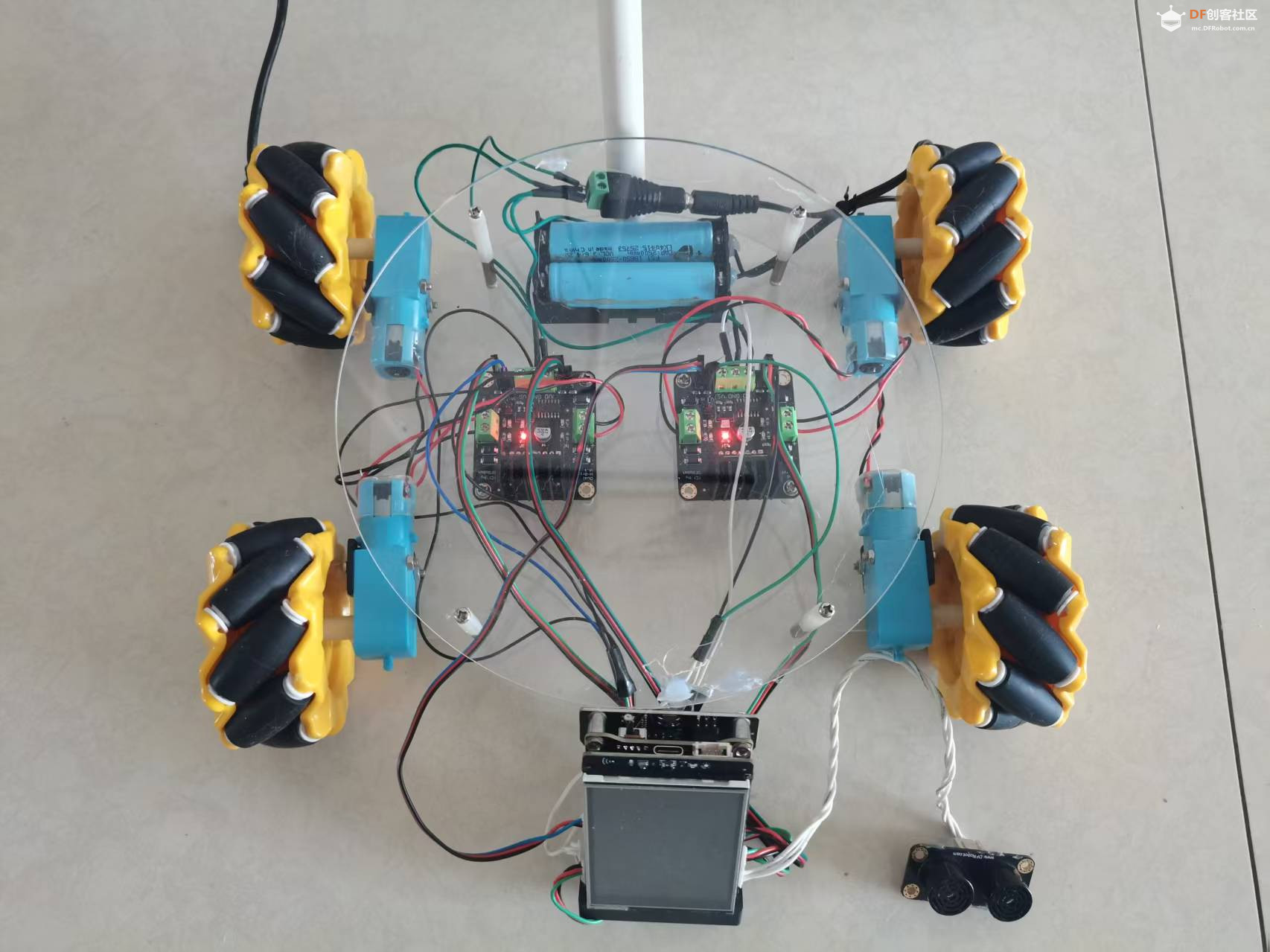 3.固定垃圾桶  4.固定摄像头   【演示视频】 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






