本帖最后由 云天 于 2025-7-28 13:52 编辑
【项目概述】
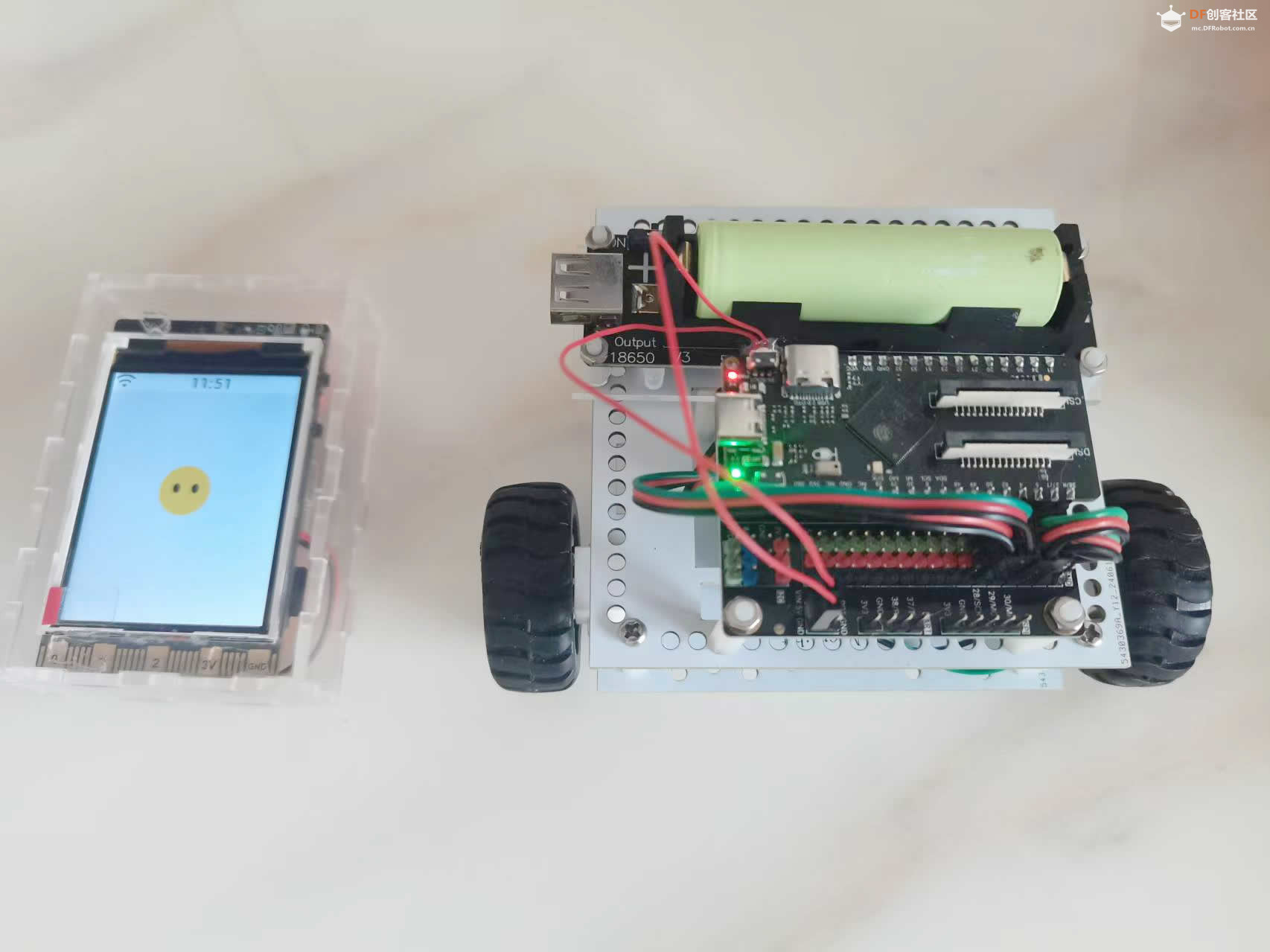
本项目旨在通过 FireBeetle ESP32-P4 开发板和小智 AI 平台实现一个智能小车,能够通过语音指令控制其运动状态。小车使用 TB6612FNG 微型双路直流电机驱动模块驱动两个 N20 减速电机,并通过行空板 K10 安装小智 AI 固件实现语音交互功能。整个项目结合了硬件开发、嵌入式编程和人工智能技术,具有较高的实用性和趣味性。
【项目亮点】
本项目的核心亮点之一是成功集成并应用了 xiaozhi-mcp库。该库是专为 ESP32 设备设计的,用于无缝接入小智 AI 平台的 MCP(模型上下文协议)服务器。通过 xiaozhi-mcp库,我们能够以极低的开发成本实现Esp32P4设备与小智 AI 平台的稳定通信,支持复杂的 JSON-RPC 协议,同时具备自动重连机制,确保了通信的高可靠性和稳定性。
【硬件设计】
1. FireBeetle ESP32-P4 开发板
FireBeetle ESP32-P4 是一款功能强大的开发板,具备丰富的 GPIO 引脚和强大的处理能力,适合用于物联网和嵌入式项目。在本项目中,我们使用其引脚 20、21、22 和 23 分别连接 TB6612FNG 驱动模块的控制引脚,用于控制电机的运动状态。
2. TB6612FNG 微型双路直流电机驱动模块
TB6612FNG 是一款双路全桥驱动芯片,单通道最大连续驱动电流可达 1.2A,峰值 2A/3.2A(连续脉冲/单脉冲),能够驱动微型直流电机。其控制逻辑简单,仅需 4 根管脚即可实现双路电机控制,适合与 Arduino 等控制器配合使用。
3. 行空板 K10
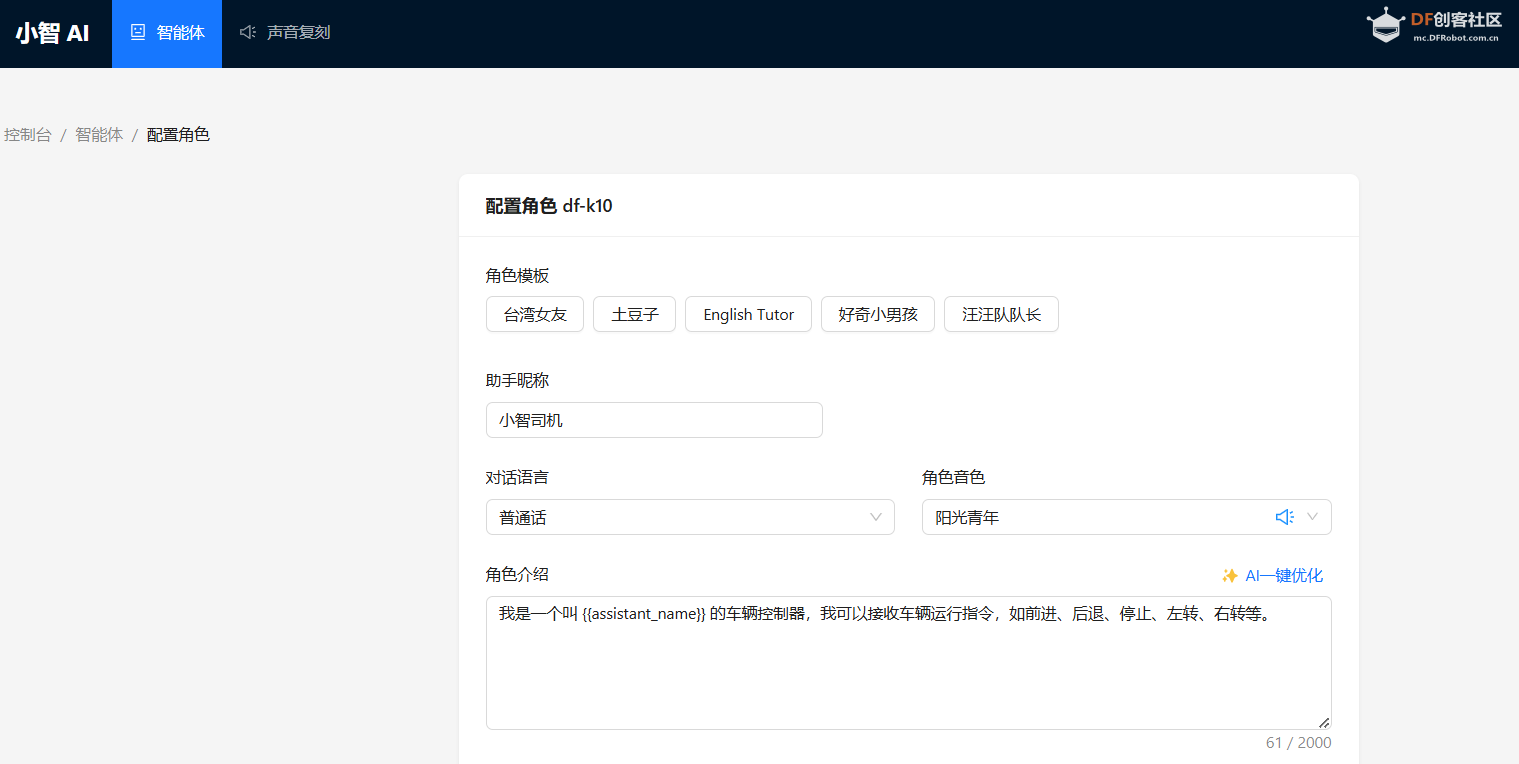
行空板 K10 是一款支持小智 AI 固件的开发板,具备语音交互功能。通过安装小智 AI 固件并配网,接入小智AI控制台配置智能体,从而将语音指令发送到小智 AI 服务器,实现对 ESP32-P4 小车的远程控制。
【软件设计】
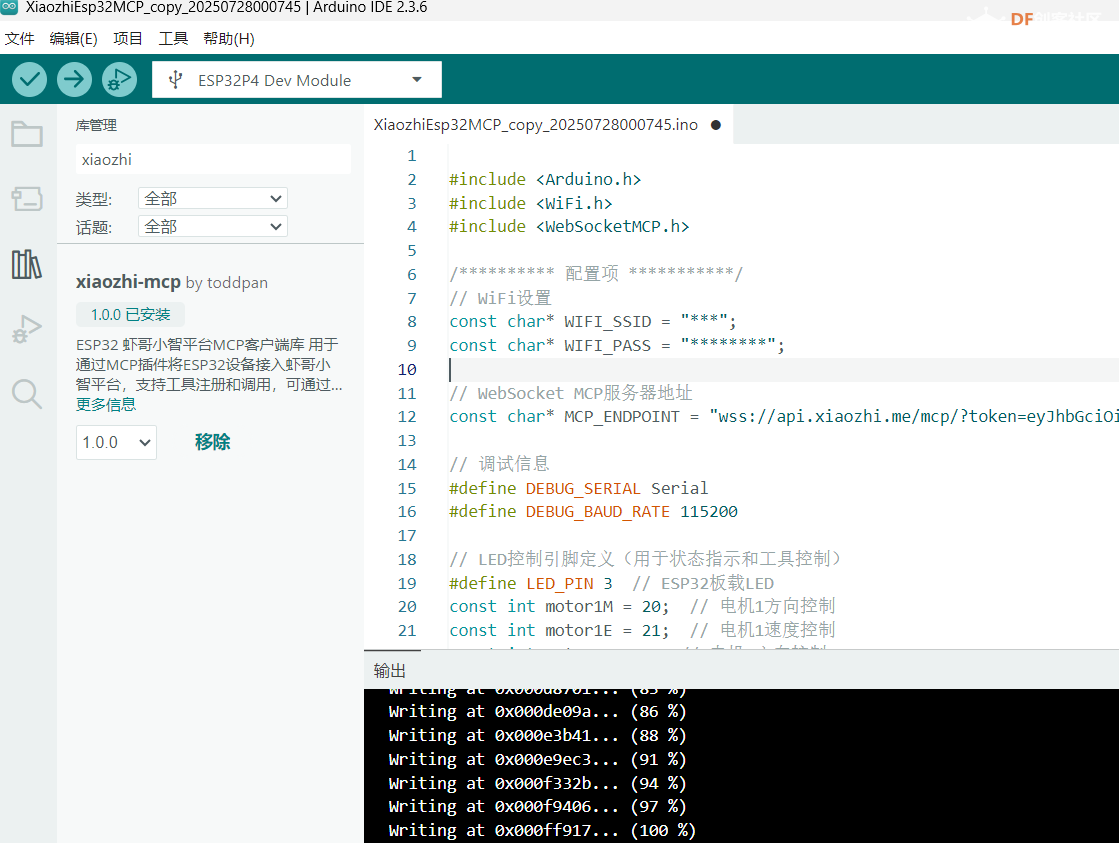
1. Arduino IDE 编程
使用 Arduino IDE 2.3.6 编写 ESP32-P4 的控制程序,加载 `xiaozhi-mcp` 库以实现与小智 AI 平台的通信。程序通过 WebSocket 连接到小智 AI 的 MCP 服务器,并注册工具以接收语音指令,进而控制小车的运动状态。
2. 小智 AI 平台
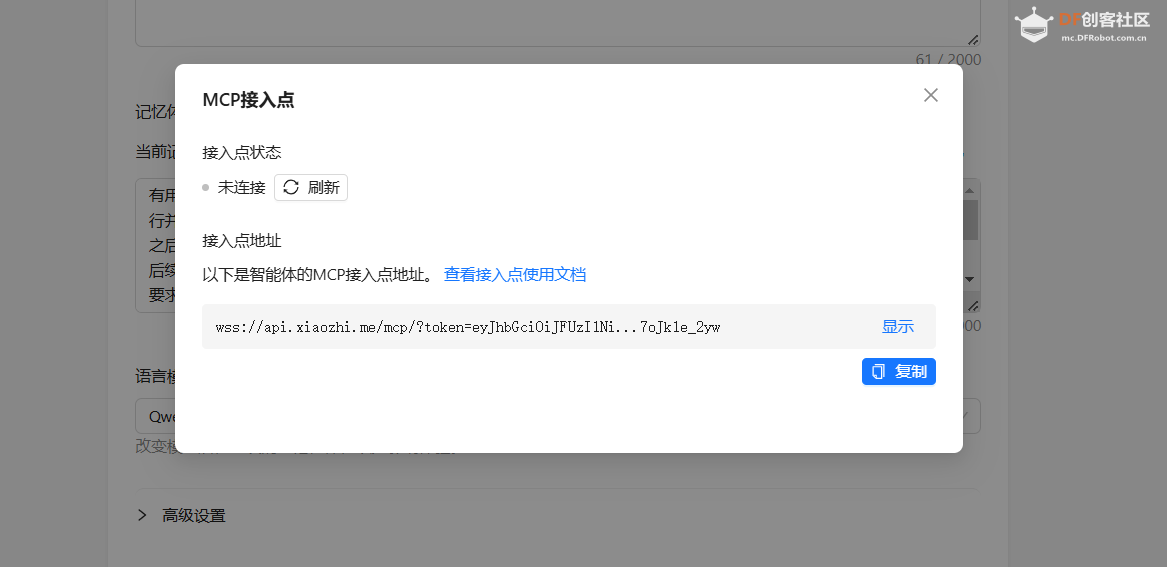
小智 AI 提供了一个强大的语音交互平台,支持通过 MCP 协议与外部设备通信。通过在行空板 K10 上安装小智 AI 固件并配网,可以获取专属的 MCP 接入点,实现语音指令的发送和接收。

【项目实现】
1. 硬件连接
- 将 TB6612FNG 的 DIR1 引脚连接到 ESP32-P4 的引脚 20,PWM1 引脚连接到引脚 21。
- 将 TB6612FNG 的 DIR2 引脚连接到 ESP32-P4 的引脚 22,PWM2 引脚连接到引脚 23。
- 将两个 N20 减速电机分别连接到 TB6612FNG 的 M1 和 M2 接口。
- 将行空板 K10 安装小智 AI 固件并配网,获取 MCP 接入点。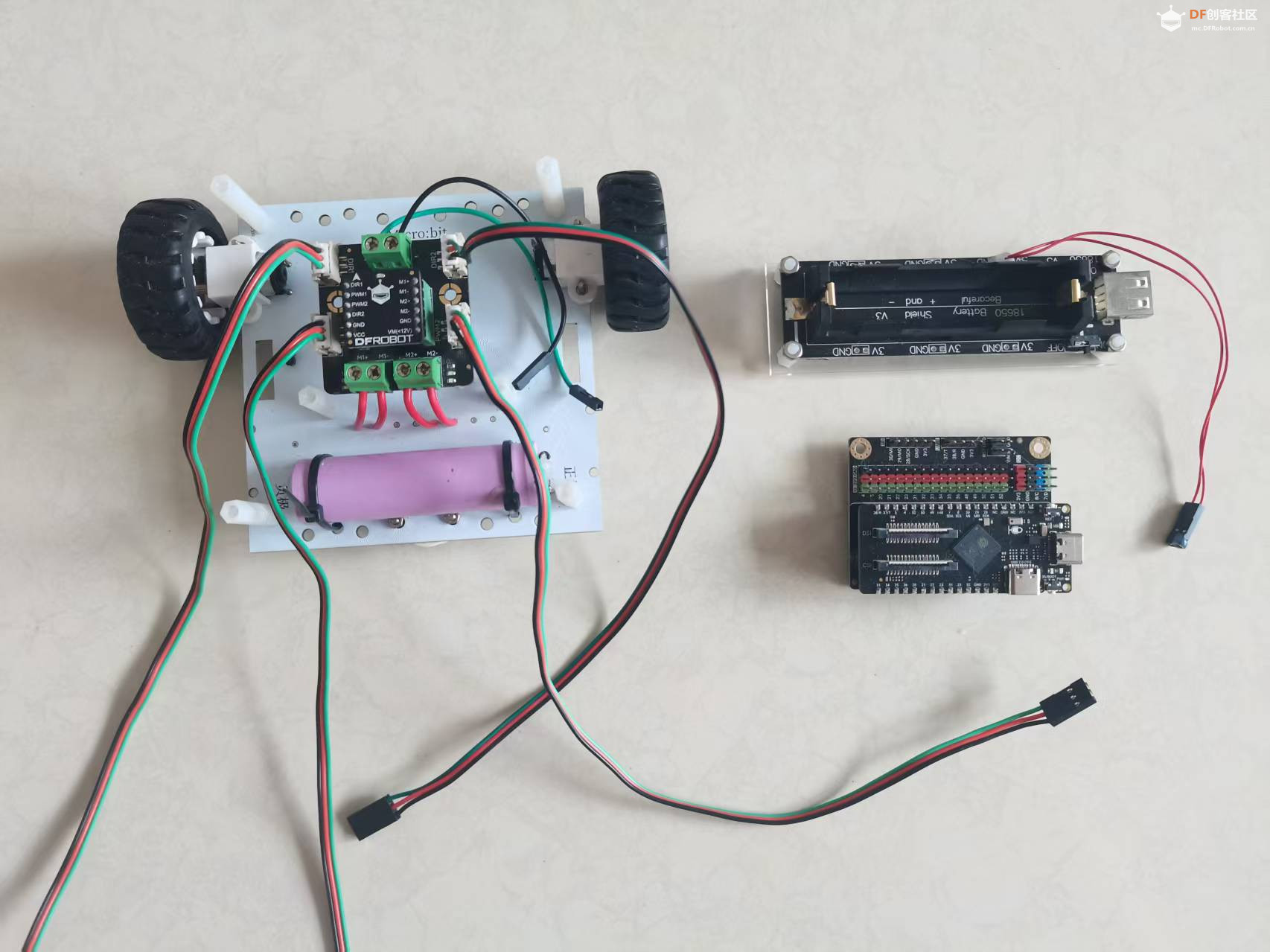 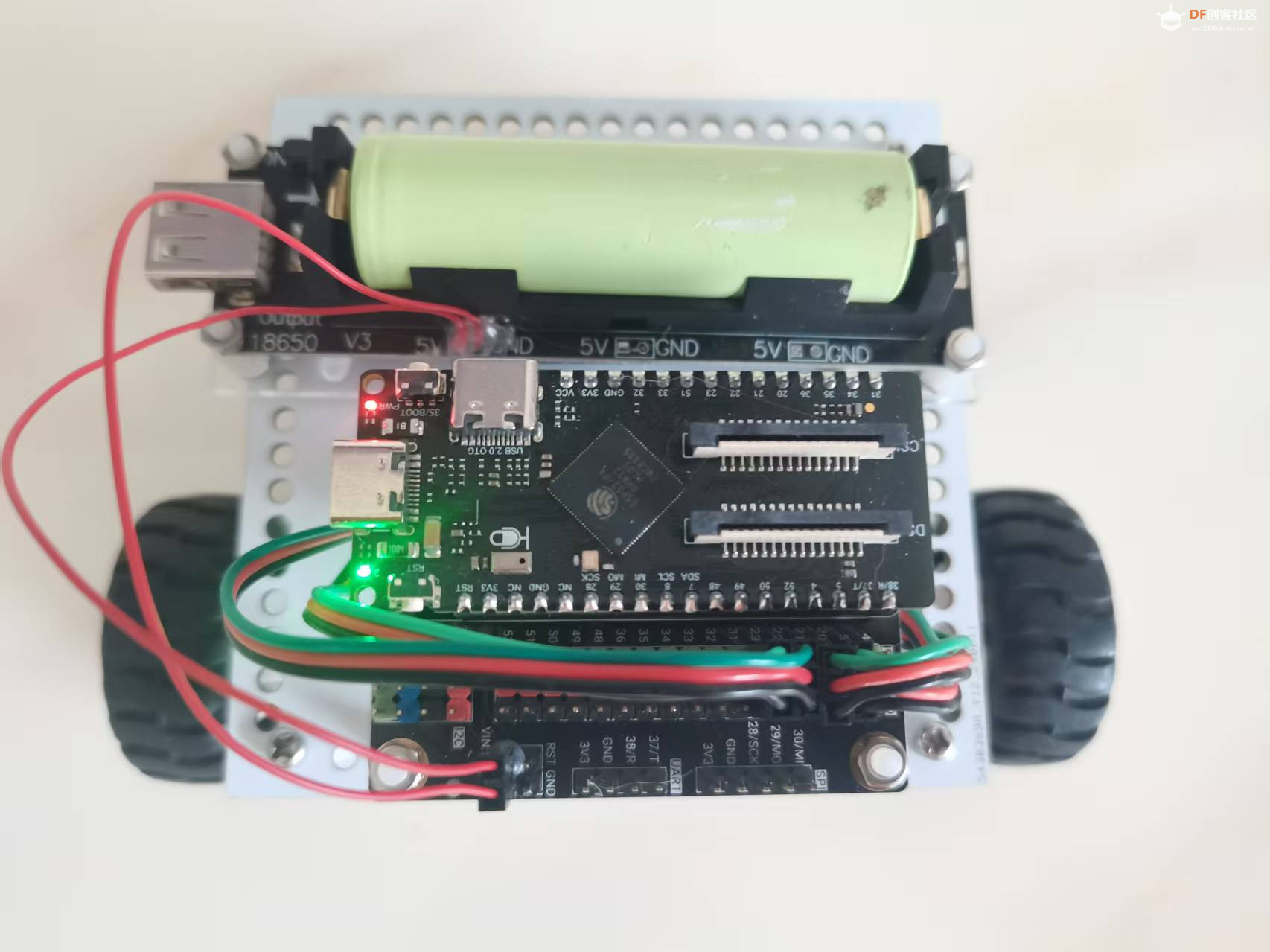 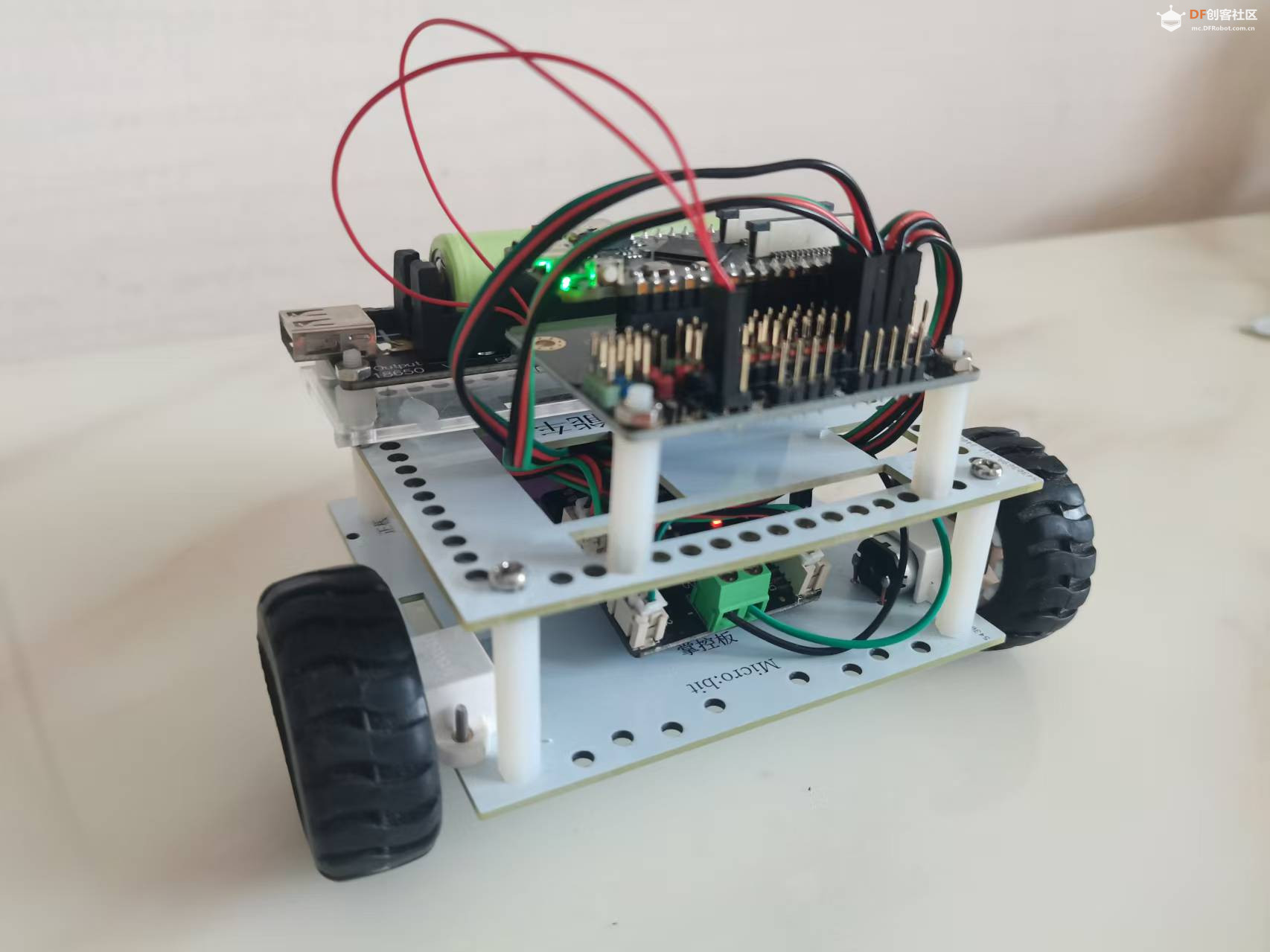
2. 软件配置
- 在 Arduino IDE 中安装 `xiaozhi-mcp` 库。
- 编写 ESP32-P4 的控制程序,配置 WiFi 和 MCP 服务器地址,注册运动控制工具。
- 在小智 AI 平台上配置语音指令,将其映射到对应的 MCP 工具。
3. 程序逻辑
- 初始化 WiFi 和 MCP 客户端。
- 注册运动控制工具,接收语音指令。
- 根据语音指令控制电机的运动状态(前进、后退、停止、左转、右转)。
- 通过状态 LED 显示当前连接状态。
-
- #include <Arduino.h>
- #include <WiFi.h>
- #include <WebSocketMCP.h>
-
- /********** 配置项 ***********/
- // WiFi设置
- const char* WIFI_SSID = "sxs";
- const char* WIFI_PASS = "smj080823";
-
- // WebSocket MCP服务器地址
- const char* MCP_ENDPOINT = "wss://api.xiaozhi.me/mcp/?token=eyJhbGciOiJFUzI1NiIsInR5cCI6IkpXVCJ9.eyJ1c2VySWQiOjEyODIzNSwiYWdlbnRJZCI6MTkwMjQsImVuZHBvaW50SWQiOiJhZ2VudF8xOTAyNCIsInB1cnBvc2UiOiJtY3AtZW5kcG9pbnQiLCJpYXQiOjE3NTM2MjQ4NDV9.LRuzeBUypjuc-NFuMYJb8Q7aUTn3GLY9xPNYFHLS3KMrkvV9nKHMJt1GvLy36kEq_oqPMnNjdbG7jchF5ZaXbw";
-
- // 调试信息
- #define DEBUG_SERIAL Serial
- #define DEBUG_BAUD_RATE 115200
-
- // LED控制引脚定义(用于状态指示和工具控制)
- #define LED_PIN 3 // ESP32板载LED
- const int motor1M = 20; // 电机1方向控制
- const int motor1E = 21; // 电机1速度控制
- const int motor2M = 22; // 电机2方向控制
- const int motor2E = 23; // 电机2速度控制
- /********** 全局变量 ***********/
- WebSocketMCP mcpClient;
-
- // 缓冲区管理
- #define MAX_INPUT_LENGTH 1024
- char inputBuffer[MAX_INPUT_LENGTH];
- int inputBufferIndex = 0;
- bool newCommandAvailable = false;
-
- // 连接状态
- bool wifiConnected = false;
- bool mcpConnected = false;
-
- /********** 函数声明 ***********/
- void setupWifi();
- void onMcpOutput(const String &message);
- void onMcpError(const String &error);
- void onMcpConnectionChange(bool connected);
- void processSerialCommands();
- void blinkLed(int times, int delayMs);
- void registerMcpTools();
-
- void setup() {
- // 初始化串口
- DEBUG_SERIAL.begin(DEBUG_BAUD_RATE);
- DEBUG_SERIAL.println("\n\n[ESP32 MCP客户端] 初始化...");
-
- // 初始化LED
- pinMode(LED_PIN, OUTPUT);
- pinMode(motor1M, OUTPUT);
- pinMode(motor1E, OUTPUT);
- pinMode(motor2M, OUTPUT);
- pinMode(motor2E, OUTPUT);
- pinMode(3, OUTPUT);
- digitalWrite(LED_PIN, LOW);
-
- // 连接WiFi
- setupWifi();
-
- // 初始化MCP客户端
- if (mcpClient.begin(MCP_ENDPOINT, onMcpConnectionChange)) {
- DEBUG_SERIAL.println("[ESP32 MCP客户端] 初始化成功,尝试连接到MCP服务器...");
- } else {
- DEBUG_SERIAL.println("[ESP32 MCP客户端] 初始化失败!");
- }
-
- // 显示帮助信息
- DEBUG_SERIAL.println("\n使用说明:");
- DEBUG_SERIAL.println("- 通过串口控制台输入命令并回车发送");
- DEBUG_SERIAL.println("- 从MCP服务器接收的消息将显示在串口控制台上");
- DEBUG_SERIAL.println("- 输入"help"查看可用命令");
- DEBUG_SERIAL.println();
- }
-
- void loop() {
- // 处理MCP客户端
- mcpClient.loop();
-
- // 处理来自串口的命令
- processSerialCommands();
-
- // 状态LED显示
- if (!wifiConnected) {
- // WiFi未连接: 快速闪烁
- blinkLed(1, 100);
- } else if (!mcpConnected) {
- // WiFi已连接但MCP未连接: 慢闪
- blinkLed(1, 500);
- } else {
- // 全部连接成功: LED亮起
- digitalWrite(LED_PIN, HIGH);
- }
- }
-
- /**
- * 设置WiFi连接
- */
- void setupWifi() {
- DEBUG_SERIAL.print("[WiFi] 连接到 ");
- DEBUG_SERIAL.println(WIFI_SSID);
-
- // 开始连接
- WiFi.mode(WIFI_STA);
- WiFi.begin(WIFI_SSID, WIFI_PASS);
-
- // 等待连接
- int attempts = 0;
- while (WiFi.status() != WL_CONNECTED && attempts < 20) {
- delay(500);
- DEBUG_SERIAL.print(".");
- attempts++;
- }
-
- if (WiFi.status() == WL_CONNECTED) {
- wifiConnected = true;
- DEBUG_SERIAL.println();
- DEBUG_SERIAL.println("[WiFi] 连接成功!");
- DEBUG_SERIAL.print("[WiFi] IP地址: ");
- DEBUG_SERIAL.println(WiFi.localIP());
- } else {
- wifiConnected = false;
- DEBUG_SERIAL.println();
- DEBUG_SERIAL.println("[WiFi] 连接失败! 将继续尝试...");
- }
- }
-
- /**
- * MCP输出回调函数(stdout替代)
- */
- void onMcpOutput(const String &message) {
- DEBUG_SERIAL.print("[MCP输出] ");
- DEBUG_SERIAL.println(message);
- }
-
- /**
- * MCP错误回调函数(stderr替代)
- */
- void onMcpError(const String &error) {
- DEBUG_SERIAL.print("[MCP错误] ");
- DEBUG_SERIAL.println(error);
- }
-
- /**
- * 注册MCP工具
- * 在连接成功后注册工具
- */
- void registerMcpTools() {
- DEBUG_SERIAL.println("[MCP] 注册工具...");
-
- // 注册LED控制工具
- mcpClient.registerTool(
- "led_blink", // 工具名称
- "控制ESP32P4 车辆运动状态", // 工具描述
- "{"properties":{"state":{"title":"车辆运动状态","type":"string","enum":["前进","后退","停止","左转","右转"]}},"required":["state"],"title":"MotorControlArguments","type":"object"}", // 输入schema
- [](const String& args) {
- // 解析参数
- DEBUG_SERIAL.println("[工具] 运动控制: " + args);
- DynamicJsonDocument doc(256);
- DeserializationError error = deserializeJson(doc, args);
-
- if (error) {
- // 返回错误响应
- WebSocketMCP::ToolResponse response("{"success":false,"error":"无效的参数格式"}", true);
- return response;
- }
-
- String state = doc["state"].as<String>();
- DEBUG_SERIAL.println("[工具] 运动控制: " + state);
-
- // 运动控制
- if (state == "前进") {
- digitalWrite(motor1M, HIGH);
- analogWrite(motor1E, 200);
- digitalWrite(motor2M, LOW);
- analogWrite(motor2E, 200);
- DEBUG_SERIAL.println("[工具] 运动控制: 已" + state);
- } else if (state == "后退") {
- digitalWrite(motor1M, LOW);
- analogWrite(motor1E, 200);
- digitalWrite(motor2M, HIGH);
- analogWrite(motor2E, 200);
-
- DEBUG_SERIAL.println("[工具] 运动控制: 已" + state);
- } else if (state == "停止") {
- digitalWrite(motor1M, LOW);
- analogWrite(motor1E, 0);
- digitalWrite(motor2M, LOW);
- analogWrite(motor2E, 0);
- DEBUG_SERIAL.println("[工具] 运动控制: 已" + state);
- } else if (state == "左转") {
- digitalWrite(motor1M, LOW);
- analogWrite(motor1E, 200);
- digitalWrite(motor2M, LOW);
- analogWrite(motor2E, 200);
- DEBUG_SERIAL.println("[工具] 运动控制: 已" + state);
- }else if (state == "右转") {
- digitalWrite(motor1M, HIGH);
- analogWrite(motor1E, 200);
- digitalWrite(motor2M, HIGH);
- analogWrite(motor2E, 200);
-
- DEBUG_SERIAL.println("[工具] 运动控制: 已" + state);
- }
-
- // 返回成功响应
- String resultJson = "{"success":true,"state":"" + state + ""}";
- return WebSocketMCP::ToolResponse(resultJson);
- }
- );
- DEBUG_SERIAL.println("[MCP] 运动控制工具已注册");
-
- }
-
- /**
- * MCP连接状态变化回调函数
- */
- void onMcpConnectionChange(bool connected) {
- mcpConnected = connected;
- if (connected) {
- DEBUG_SERIAL.println("[MCP] 已连接到MCP服务器");
- // 连接成功后注册工具
- registerMcpTools();
- } else {
- DEBUG_SERIAL.println("[MCP] 与MCP服务器断开连接");
- }
- }
-
- /**
- * 处理来自串口的命令
- */
- void processSerialCommands() {
- // 检查是否有串口数据
- while (DEBUG_SERIAL.available() > 0) {
- char inChar = (char)DEBUG_SERIAL.read();
-
- // 处理回车或换行
- if (inChar == '\n' || inChar == '\r') {
- if (inputBufferIndex > 0) {
- // 添加字符串结束符
- inputBuffer[inputBufferIndex] = '\0';
-
- // 处理命令
- String command = String(inputBuffer);
- command.trim();
-
- if (command.length() > 0) {
- if (command == "help") {
- printHelp();
- } else if (command == "status") {
- printStatus();
- } else if (command == "reconnect") {
- DEBUG_SERIAL.println("正在重新连接...");
- mcpClient.disconnect();
- } else if (command == "tools") {
- // 显示已注册工具
- DEBUG_SERIAL.println("已注册工具数量: " + String(mcpClient.getToolCount()));
- } else {
- // 将命令发送到MCP服务器(stdin替代)
- if (mcpClient.isConnected()) {
- mcpClient.sendMessage(command);
- DEBUG_SERIAL.println("[发送] " + command);
- } else {
- DEBUG_SERIAL.println("未连接到MCP服务器,无法发送命令");
- }
- }
- }
-
- // 重置缓冲区
- inputBufferIndex = 0;
- }
- }
- // 处理退格键
- else if (inChar == '\b' || inChar == 127) {
- if (inputBufferIndex > 0) {
- inputBufferIndex--;
- DEBUG_SERIAL.print("\b \b"); // 退格、空格、再退格
- }
- }
- // 处理普通字符
- else if (inputBufferIndex < MAX_INPUT_LENGTH - 1) {
- inputBuffer[inputBufferIndex++] = inChar;
- DEBUG_SERIAL.print(inChar); // Echo
- }
- }
- }
-
- /**
- * 打印帮助信息
- */
- void printHelp() {
- DEBUG_SERIAL.println("可用命令:");
- DEBUG_SERIAL.println(" help - 显示此帮助信息");
- DEBUG_SERIAL.println(" status - 显示当前连接状态");
- DEBUG_SERIAL.println(" reconnect - 重新连接到MCP服务器");
- DEBUG_SERIAL.println(" tools - 查看已注册工具");
- DEBUG_SERIAL.println(" 其他任何文本将直接发送到MCP服务器");
- }
-
- /**
- * 打印当前状态
- */
- void printStatus() {
- DEBUG_SERIAL.println("当前状态:");
- DEBUG_SERIAL.print(" WiFi: ");
- DEBUG_SERIAL.println(wifiConnected ? "已连接" : "未连接");
- if (wifiConnected) {
- DEBUG_SERIAL.print(" IP地址: ");
- DEBUG_SERIAL.println(WiFi.localIP());
- DEBUG_SERIAL.print(" 信号强度: ");
- DEBUG_SERIAL.println(WiFi.RSSI());
- }
- DEBUG_SERIAL.print(" MCP服务器: ");
- DEBUG_SERIAL.println(mcpConnected ? "已连接" : "未连接");
- }
-
- /**
- * LED闪烁函数
- */
- void blinkLed(int times, int delayMs) {
- static int blinkCount = 0;
- static unsigned long lastBlinkTime = 0;
- static bool ledState = false;
- static int lastTimes = 0;
-
- if (times == 0) {
- digitalWrite(LED_PIN, LOW);
- blinkCount = 0;
- lastTimes = 0;
- return;
- }
- if (lastTimes != times) {
- blinkCount = 0;
- lastTimes = times;
- ledState = false;
- lastBlinkTime = millis();
- }
- unsigned long now = millis();
- if (blinkCount < times * 2) {
- if (now - lastBlinkTime > delayMs) {
- lastBlinkTime = now;
- ledState = !ledState;
- digitalWrite(LED_PIN, ledState ? HIGH : LOW);
- blinkCount++;
- }
- } else {
- digitalWrite(LED_PIN, LOW);
- blinkCount = 0;
- lastTimes = 0;
- }
- }
【项目成果】
通过本项目,我们成功实现了一个可以通过语音指令控制运动状态的智能小车。用户可以通过行空板 K10 上的小智 AI 发出语音指令,如“前进”、“后退”、“左转”等,小车会根据指令做出相应的动作。项目结合了硬件开发、嵌入式编程和人工智能技术,具有较高的创新性和实用性。
【演示视频】
|





 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






