|
13086| 2
|
[入门] 【天天向上】Pixy运行云台演示 |

本帖最后由 云天 于 2020-7-17 18:21 编辑    个人的云台,与教程中的基本上一致,有点区别 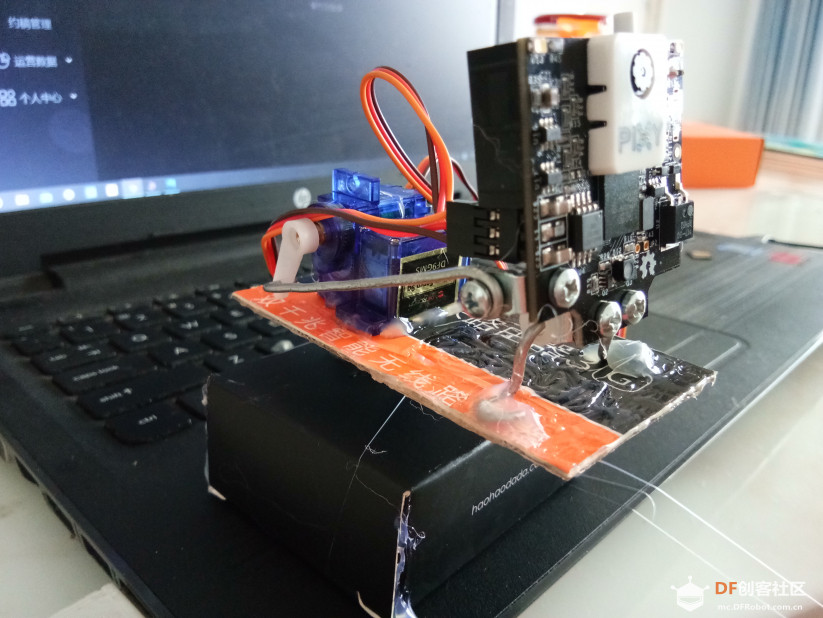 教程:组装云台机制 当与Pixy结合使用时,平移/倾斜机制将成为一个有趣的演示—对于Pixy是一个很好的“ hello world”(不需要Arduino)。平移/倾斜机构包含在套件中,需要进行一些组装。 您将需要以下组件(除了Pixy2和云台组件之外):  紧固件类型 该套件中包含许多不同类型的紧固件。请参考下图,以帮助您找到我们在以下说明中所指的紧固件。  部件 1-在伺服系统中找到“十字”伺服喇叭。如图所示,并使用剪线钳夹住三个腿。将修改过的号角放在一旁,或将其放在其中一个伺服器上以确保安全。   2-如图所示,从“框架”塑料片上取下纸衬。  3-如图所示,将其中一个舵机从其包装袋中取出并通过将其侧凸缘插入车架插槽将其连接到车架。伺服器的法兰非常紧贴插槽,需要一定的力。这将是倾斜伺服。  4-如图所示,翻转框架并将其翻过来,然后安装电缆扎带。  5-如图所示,连接第二根电缆扎带并用手拧紧。  6-用钳子抓住电缆扎带的末端并拉紧,以拧紧电缆扎带。  7-如图所示,将第二个伺服器从其包装袋中取出并将其安装到框架的孔中。这将是平移伺服。  8-使用两个长的自攻紧固件将伺服器安装到框架上,注意不要拧得太紧,否则可能会剥落塑料。  9-取出所有五个金属直角支架并进行检查。请注意,其中三个有两个螺纹孔,而两个有一个螺纹孔。我们将分别称为两线程和一线程括号。继续将这两种托架类型分成两堆,以使事情变得容易。 抓住两螺纹支架。如果仔细观察,您会发现它的一条腿比另一条腿稍长。说什么?是的,我不知道为什么。但是,最好通过查看支架上的孔来看到这一点。其中一个孔在其支脚中居中,另一个孔未居中,因为其支脚稍长。如果不加以考虑,则足以引起问题。 使用长的4-40紧固件,如图所示,将两个螺纹的支架连接到框架。支架的较长支脚可容纳紧固件(较短的一侧会粘住)。在框架的另一侧,使用另一个长的4-40紧固件和两螺纹支架进行此操作。  10-如图所示,用短的4-40紧固件将单螺纹支架连接到Pixy的底部。(带螺纹的支腿装有紧固件,无螺纹的支腿粘在上面。)用另一个短的4-40紧固件和单螺纹支架在Pixy的相邻孔中进行此操作。   11-如图所示,将两个尼龙衬套按入这些支架的无螺纹孔中。  12-如图所示,将Pixy插入框架的支架之间。使用两个长的4-40紧固件将Pixy固定到框架组件上,每侧一个。请注意,这些紧固件以独特的方式使用-它们不会“固定” Pixy,而是“捕获”支架之间的Pixy,并形成Pixy用于倾斜的轴。可能有必要拧松将支架连接到框架的紧固件,以使这些紧固件完全拧紧。  13-如图所示,将Pixy的倾斜轴一直向下。检查事物以确保所有事物都是正方形的。如果物体不是方形的(如果pixy弯曲等),请松开将支架固定到Pixy和/或框架的紧固件,并进行调整,直到物体完全呈方形,然后重新拧紧。  14-将伺服线插入Pixy的伺服连接器。从Pixy2的背面看,平移伺服器位于连接器的左侧。倾斜伺服器位于连接器的右侧。(哪个是倾斜轴?它是由束线带压紧的。)  15-如图所示,使用束线带压住电缆。   16-在扎紧电缆扎带之前,请确保有足够的电缆松弛度以使Pixy完全倾斜。请勿过度拧紧电缆扎带,否则可能会损坏电线。   17-如图所示,使用剪钳卸下电缆扎带的末端。  18-抓住一个短的4-40紧固件,钢丝推杆和其余的2螺纹支架。如图所示,将推杆安装到支架上,使支架的较长支脚容纳紧固件。另外,请注意图片中推杆的方向,以确保其未“翻转”。 最后,不要拧紧推杆上的紧固件。松开紧固件,使推杆可绕紧固件轴自由旋转。它将保持这种方式,以便倾斜轴可以通过其推杆自由移动。  19-如图所示,将推杆的另一端拧入修改后的伺服喇叭中。伺服喇叭应具有3个推杆孔-建议使用中间孔。  20-如图所示,将推杆及其支架对准Pixy。  21-如图所示,使用短的4-40紧固件将紧固件连接到Pixy。  22-将USB电缆插入Pixy,以使Pixy上电并“调零”伺服器。  23-保持USB电缆的插入状态,并将倾斜伺服喇叭连接到倾斜伺服上。如图所示,伺服喇叭和Pixy应接近直立。  24-剥去云台底座的衬板。  25-使用圆形伺服喇叭,将其对准云台基座上两个可能的位置之一。如果您仅在台式机上使用旋转云台机构,则可能更喜欢将伺服喇叭安装在中心位置,或者如果打算安装旋转云台,则可能更倾向于偏心安装伺服喇叭。机器人上的机械装置。偏离中心的位置使Pixy2可以更有效地查看底部的边缘。   26-如图所示,使用短攻紧固件将圆形伺服喇叭安装到云台基座。长的自攻紧固件会阻止云台伺服器旋转,因此请务必使用短的紧固件。  27-如图所示,使用四个尼龙支架和四个2-56紧固件将支架固定到云台底座上。   28-如图所示,将底座安装到旋转舵机。  29-使用伺服喇叭固定器(在伺服系统中找到)固定倾斜和旋转伺服喇叭。   30-基板上有两个用于固定支架的孔模式:上面显示的矩形孔模式;如果要将Pixy旋转云台安装在Arduino顶部,则为Arduino孔模式。如果您希望将Pixy云台安装在Arduino的顶部,请参见下文。   这是Arduino和底板翻转的另一种配置。 运行云台演示 好的,您已经组装了云台旋转机构,它看起来很酷,但是如果移动它看起来会更酷。一件好事是,不需要电池来移动云台–云台可以使用USB电缆供电。建议使用Pixy2随附的USB电缆为Pixy和云台供电。但是,只要电缆为4英尺或更短(通常为3英尺),您就可以使用自己的电缆。如果使用更长的电缆,则电缆上可能会有高达1伏的压降,这对于Pixy来说很好,但伺服器会发生故障。另外,在运行云台演示之前,请继续教Pixy一个对象(如果还没有的话)。 我们还应该提到,在运行演示之前,必须以某种方式将云台底座固定在桌子上。将云台连接到Arduino就足够了。否则,您可以尝试将云台底座放置在两本书之间。如果您不锚定底座,则底座将倾向于在Pixy下旋转,从而使Pixy或多或少保持静止(我们希望Pixy能够移动/旋转!) 注意:如果您无法使云台正常运行,请访问以下方便的故障排除页面。 有两种方法可以运行云台演示。 从PixyMon运行演示 如果您正在运行PixyMon,则可以随时在“ 程序”菜单中选择该演示(或任何其他程序)来运行该演示。特别是,选择Program➜pan_tilt_demo。 然后,Pixy应该跟踪您的对象并在视频窗口中绘制检测到的对象。好极了!请注意,Pixymon将切换到仅块视图,因此视频窗口将变为黑色,除了Pixy正在检测的内容(显示为矩形块)。平移演示切换到此视图,因为它允许Pixy以最大帧速率进行处理(不会降低Pixy的速度。)  在PixyMon中,您还可以使用pan-tilt演示参数:  例如,尝试将Pan P增益(水平轴比例增益)降低到100,然后查看水平轴的速度如何降低。或者增加P增益,看看会发生什么。很多时候,增加收益会导致某些不稳定的行为,但请不要担心-您不会损坏任何东西。如果要返回默认值,请选择File➜Restoredefault parameters。有更多的信息在这里。 从Arduino运行演示 您也可以让Arduino执行水平倾斜跟踪。Arduino读取对象块并计算平移和倾斜伺服器的位置,并将计算出的位置发送回Pixy,然后Pixy更新伺服器位置。这非常适合使您的Pixy和Arduino更好地了解,并使它们在您编写的某种应用程序中进行协作。 这要求您运行color_connected_components Pixy程序,而不是pan_tilt_demo程序。 OK,通过获取最新Arduino的Pixy2代码,描述开始在这里。通过在Arduino IDE的File➜Examples➜Pixy2➜ccc_pantilt中选择它来加载pan-tilt演示。上载它,并且只要Pixy正在运行color_connected_components程序,您就应该开始看到旋转云台移动以跟踪Pixy获取的第一个对象。(请注意,如果您尚未教Pixy一个对象,则需要教它。) 您还可以使用Arduino代码,例如更改比例和微分增益。 PIDLoop panLoop(500,0,400,true);PIDLoop flipLoop(600,0,500,true);在这里,500是比例增益,400是微分伺服的微分增益。同样,600和500是倾斜轴的比例增益和微分增益。尝试将比例增益降低一半,然后看看会发生什么。很多时候,增加收益会导致某些不稳定的行为,但请不要担心-您不会损坏任何东西。 稍作调整和修改,此代码即可成为“跟踪”算法,而不是“跟踪”算法。也就是说,您无需计算伺服位置,而是可以计算电动机速度。因此,现在您创建的Pixy-Arduino机器人可以追逐球,玩具等。Arduino示例ccc_zumo_chase正是这样做的。它控制4个轴:平移,倾斜,左右电机以追逐所获取的对象。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






