|
9085| 4
|
[项目] 【一起DIY】吞币机器人 |

本帖最后由 hockel 于 2021-1-5 20:35 编辑 项目源起一个小小的存钱罐,承载着的是对与童年的回忆。存钱罐也是家庭中用来存放散乱零钱的常用工具。最近有个存钱罐红遍了网络,受到很多人青睐,不仅仅唤起对童年存钱罐的幻想,还纷纷购买,那就是无脸男自动吞币存钱罐。 项目展示
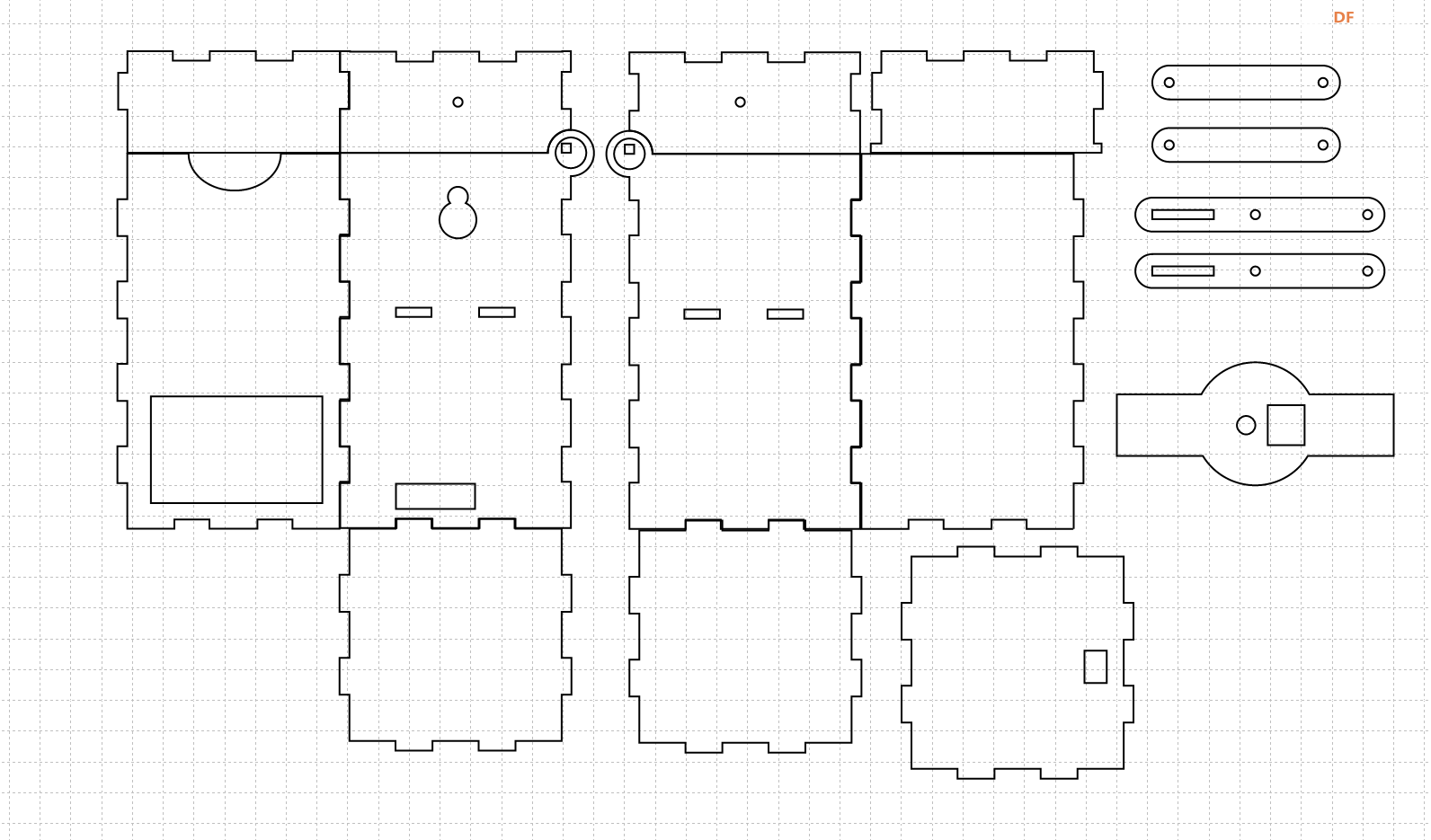
硬件清单
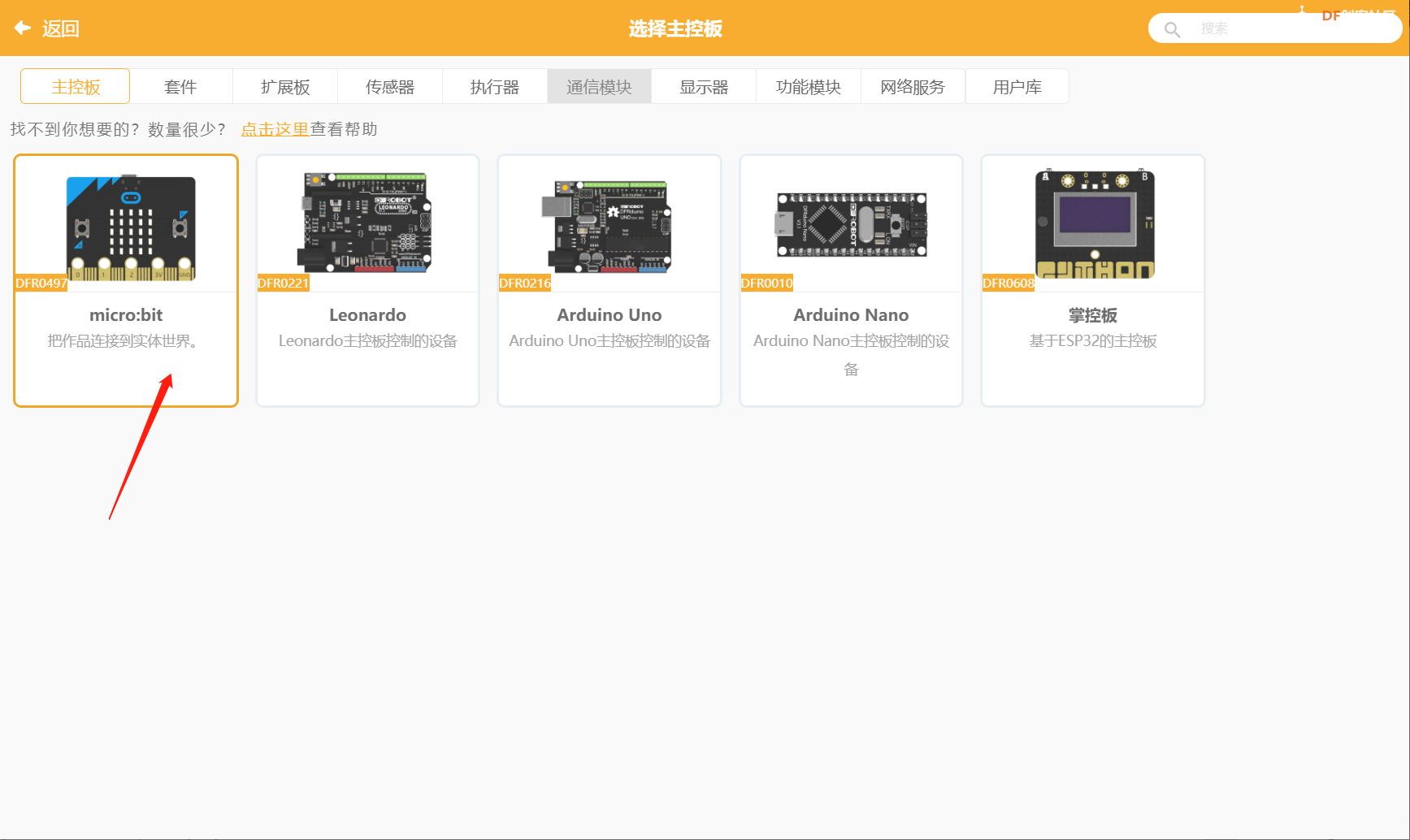
制作过程1、吞币原理 连杆结构:又称低副机构,是机械的组成部分中的一类,指由若干(两个以上)有确定相对运动的构件用低副(转动副或移动副)联接组成的机构,如下图 程序编写使用的是Mind+编程软件,此项目程序编写涉及到的硬件有microbit 、光线传感器、和9g舵机,因此在编写程序前先将这些拓展指令模块添加上。 第一步:打开Mind+鼠标点击扩展按钮
准备工作: 代码编写: ① 将角度值设为变量,并设置初始值。 ② 当角度值为100°时,会以1为幅度增加角度值,直到角度达到150度,同理,当角度值达到150°时,以-1为幅度恢复到100度。 ③选择当环境光线值检测到硬币,也就是小于一定值时舵机转一定的角度,随后回复原位。 改进与提升结构上还是初代产品,目前只实现了吞硬币的操作,没有预留取硬币的开口,光线传感器检测有无硬币有些不妥,后面慢慢改进。更多项目制作教程欢迎关注个人博客:www.hockel.club |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed
















 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






