|
9993| 1
|
[项目] 玩转舵机 | 同步机械臂 |

 创作说明 时光荏苒,翻看“玩转舵机”系列作品的发布时间,竟已是一年前。那时候,还没有“新冠”这个词。这次为什么又会捡起这个主题再创作呢?源于DF寄了几个离合舵机给我试用。 这款舵机产品确实给力,后面会有一个简单的评测。该拿它来做个什么作品呢?一直没有好的想法,搁置了好久。上周在逛DF创客论坛的时间,留意到有一个"再造创客挑战赛"活动,号召进行经典再造。活动我没想参加,不过思路倒可以拿来一用。正好浏览到一个“同步机械臂”的帖子,这个作品的实现原理其实跟我做的“三轴机械臂”是一样的。何不再造一个“同步机械臂”呢? 我做的这个“同步机械臂”,有几个创新点:(1)没有借助现成的机械手成品,而是使用激光切割椴木板自行构建模型,外观上更新颖,成本更低;(2)设置了“实时同步”、“延时模仿”两种模式;(3)可以和原来的“三轴机械臂”一样做任务,注重趣味性。 了解“三轴机械臂”作品,可点击下方链接: “同步机械臂”演示视频 离合舵机  当舵机在机器人、模型等运转复杂的环境下使用时,经常发生舵机卡齿烧坏、被堵转导致损坏等情况。 DF推出了一系列带离合功能和电子保护的舵机,很好的解决了这个痛点。 离合功能 当舵机在正常运行期间有外力改变其角度时, 通过离合功能舵机能自动复位并继续工作,弥补了普通舵机在运作期间受外力改变角度容易损坏的缺点。 电子保护 当舵机被堵转5秒后舵机将自行断电保护,防止舵机因被堵转而烧毁。 下面是我录制的一段测试视频,相信大家一定会喜欢上这一款舵机。 离合舵机测试视频 制作过程 No.1 准备材料 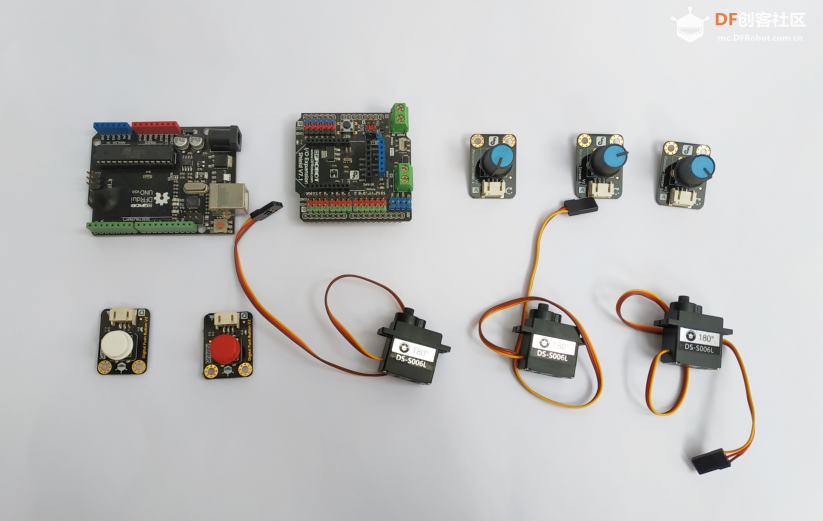 材料清单: Arduino主控板 1块 DF V7.1扩展板 1块 旋钮电位器 3个 180°离合舵机 3个 数字按钮模块 2个 No.2 硬件搭建 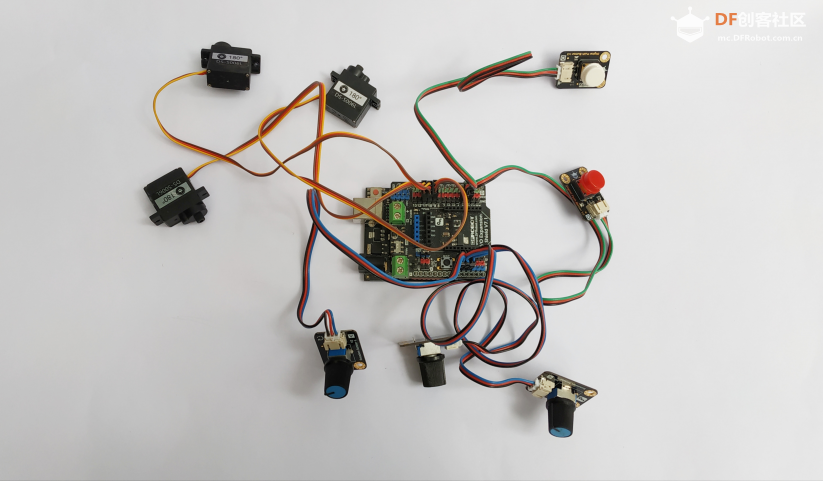 3个电位器分别接到引脚A0、A1、A2 3个舵机分别接到引脚10、11、12 2个数字按钮分别接到引脚2、3 No.3 编写程序 利用Mind+ V1.6.6编写程序。  编写好程序后,上传到主控板,测试是否能实现预定功能。 No.4 绘图、切割 利用激光建模软件LaserMaker进行图纸绘制。 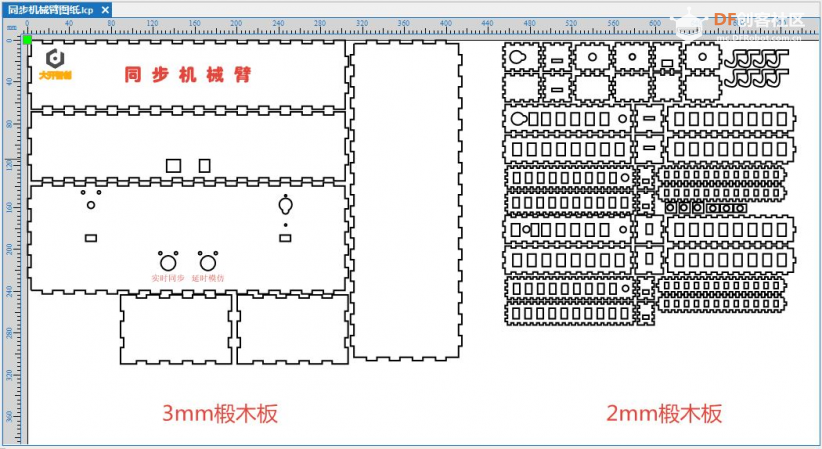 利用激光机进行切割加工。 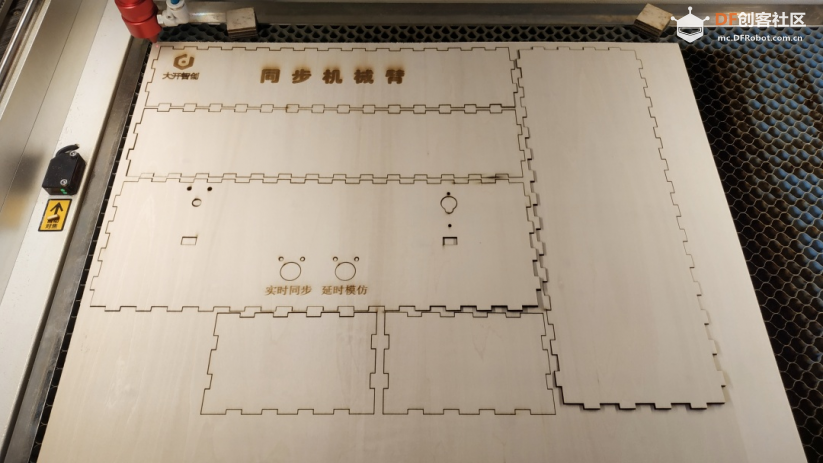 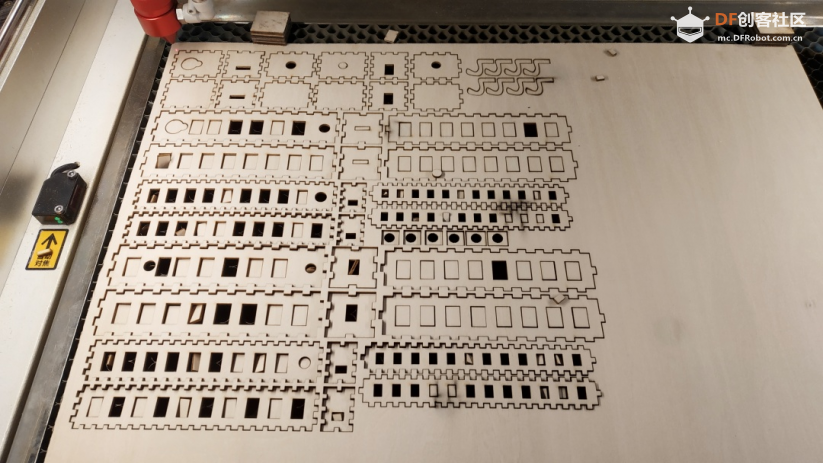 No.5 组装步骤 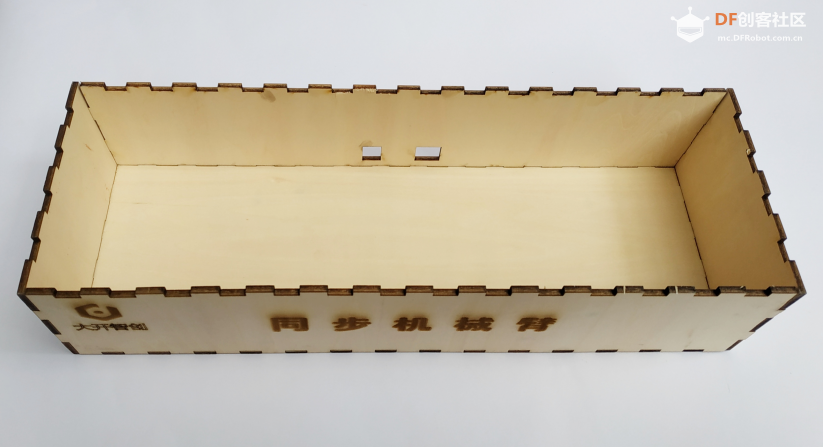 组装底盒  安装舵机和数字按钮 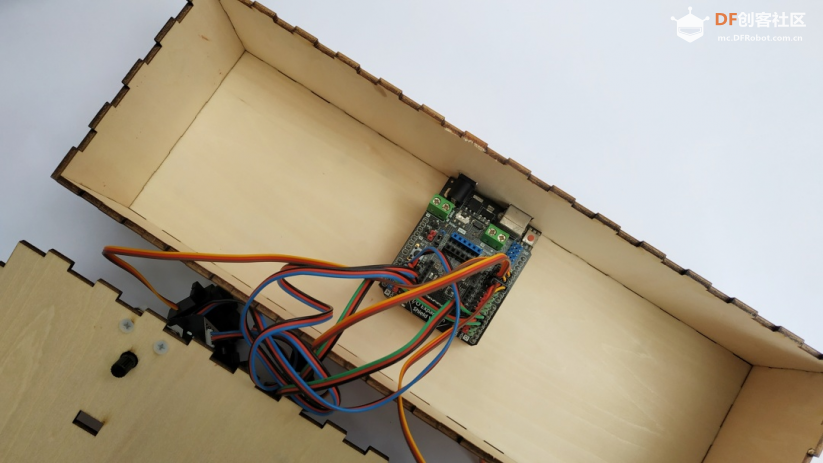 固定主控板 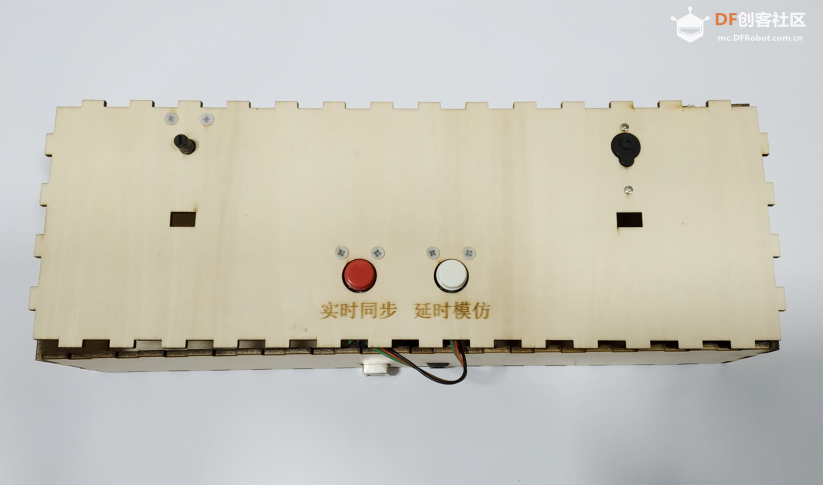 虚合上顶板 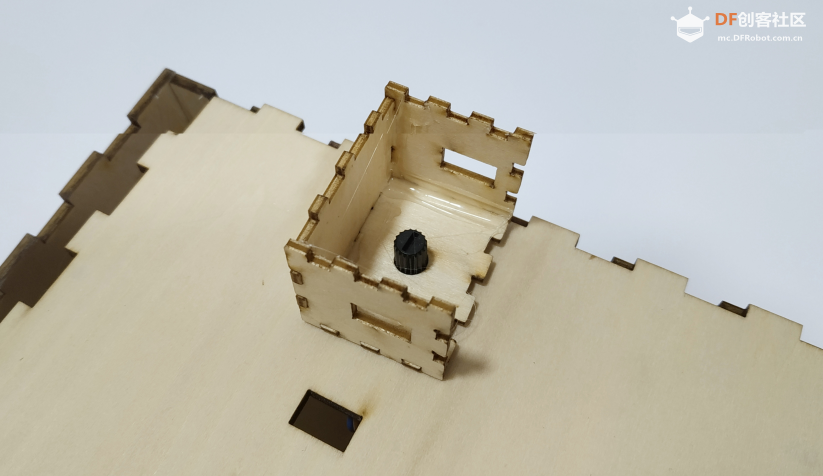 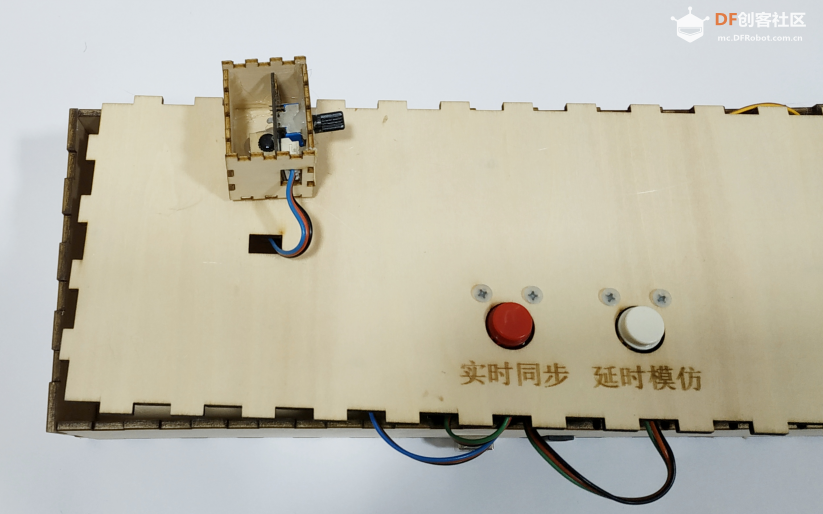 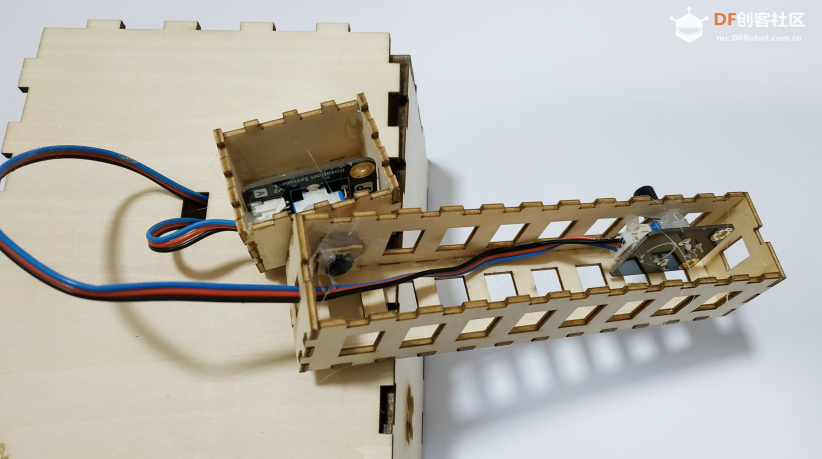 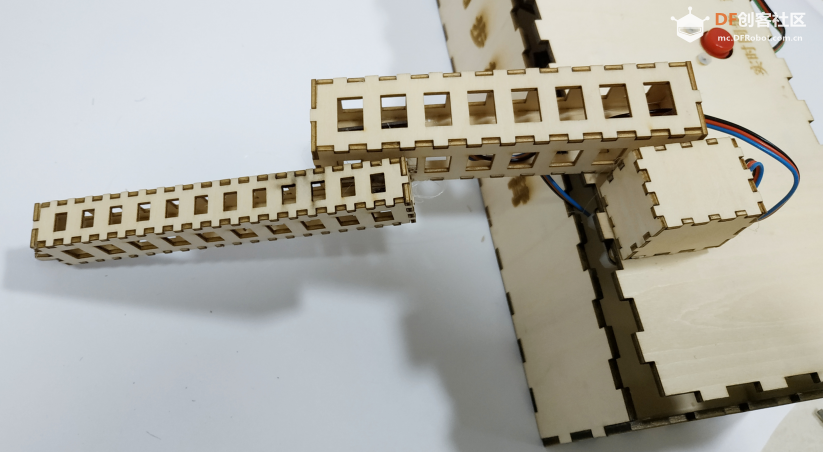 安装左边的机械臂 关节处使用电位器连接 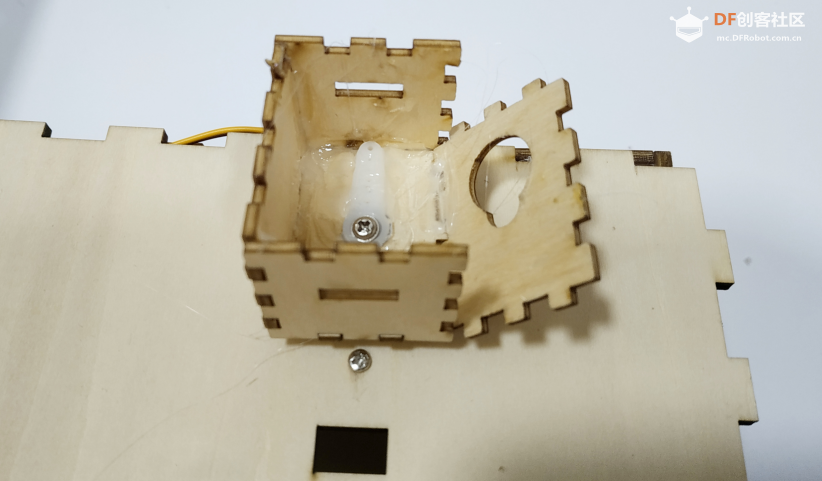  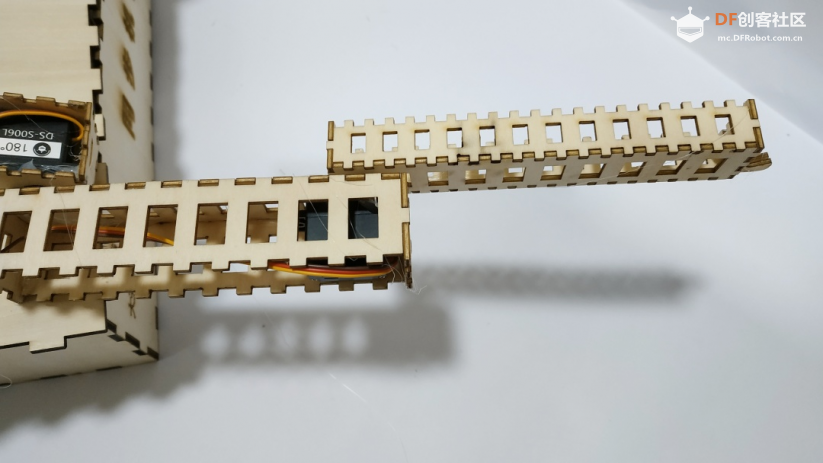 安装右边的机械臂 关节处使用舵机连接  组装完成 总结反思 虽然两次做的机械臂的原理相同,但是经过外型和结构的再造,作品的功能却有了极大的改变,这应该是创客作品创作的一大方向。 在编程中遇到了一个问题,有待后期进行学习并解决。舵机的旋转角度范围是180°,而旋钮电位器的旋转角度范围是270°。为了保持运动幅度的一致,使用“映射”指令时,采用了“170—853”映射到“0—180”的算法。当旋钮电位器的模拟值大于853时,预设是舵机会停止在180°处,但是实际运行时舵机却会反向旋转一定的角度。后来尝试增加使用“约束”积木,还是会产生同样的情况。 在“延时模仿”模式下,经过反复测试,最快只能做到每隔0.5秒采集一次数据,否则运行不正常。这样导致机械臂延时模仿时,动作不够连贯顺畅。我想应该可以通过更好的算法来改进。 希望各位高手不吝赐教! |

167.21 KB, 下载次数: 2814
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






