|
11555| 3
|
[项目] 【智控万物】手势传感器控制"3D物体"旋转 |
本帖最后由 云天 于 2021-1-27 15:02 编辑 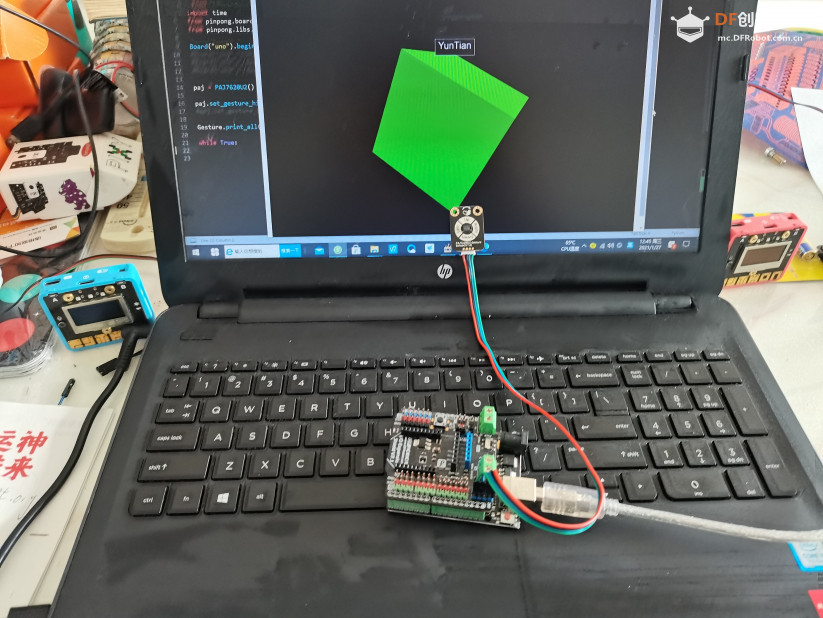 【项目设计】 利用手势传感器,控制3D物体的旋转。 【手势传感器】 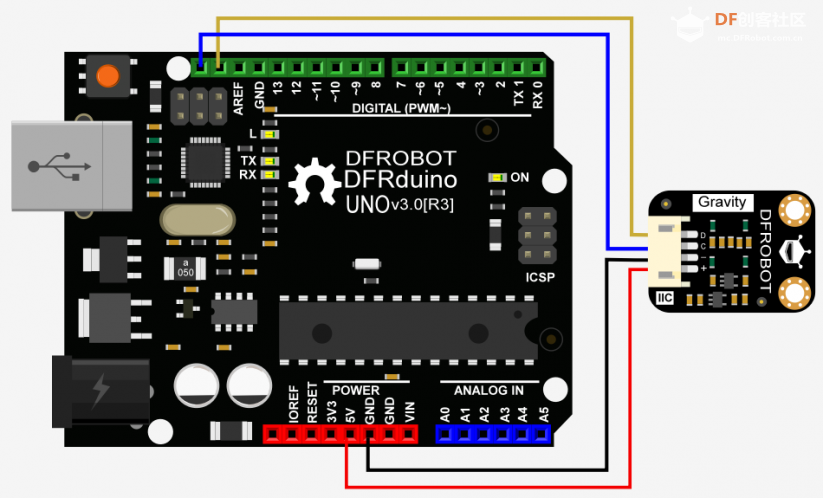 PAJ7620U2手势识别传感器是一款以IIC通信的3D手势识别交互式传感器。工作电流仅3.5mA, 手势识别距离达20mm。在最远20cm范围内,可以识别的手势多达13种。该手势传感器具备良好的手势识别稳定性,反应快,准确率高,可识别多种手势。支持两种手势识别模式,高速模式(可识别9种)和低速模式(可识别13种)。支持用户自定义识别手势。 PAJ7620U2手势识别传感器在高速模式下可识别上,下,左,右,前,后,顺时针,逆时针,快速挥手。而低速模式除了支持高速基础包含的所有手势外,还支持慢速上下,慢速左右,慢速前后,乱序。此外,低速模式可以自定义单位采样时间,还可根据自己需要轻松定义识别手势。 市面上主流的手势传感器可识别手势通常仅为六种,而对于非接触式遥控器,手势游戏机等应用,仅有的基础性6种识别模式完全不够。而PAJ7620U2手势识别传感器的出现,解决了手势识别模式欠缺的问题。PAJ7620U2手势识别传感器广泛适用于非接触式遥控器,机器人交互,手势操作游戏机,手势控制酷炫灯光等应用。 【PinPong】 PinPong中手势传感器演示代码: # -*- coding: utf-8 -*- #实验效果:读取I2C PAJ7620U2手势传感器 #接线:使用windows或linux电脑连接一块Arduino主控板,手势传感器接到I2C口SCL SDA import time from pinpong.board import Board from pinpong.libs.dfrobot_paj7620u2 import PAJ7620U2,Gesture Board("uno").begin() #初始化,选择板型和端口号,不输入端口号则进行自动识别 #Board("uno","COM36").begin() #windows下指定端口初始化 #Board("uno","/dev/ttyACM0").begin() #linux下指定端口初始化 #Board("uno","/dev/cu.usbmodem14101").begin() #mac下指定端口初始化 paj = PAJ7620U2() paj.set_gesture_high_rate() #设置高速模式 #paj.set_gesture_low_rate() #设置低速模式 Gesture.print_all() while True: description,gesture = paj.get_gesture() if gesture != Gesture.none: print("gesture code =%s"%gesture) print("gesture description =%s"%description) 【控制Box】 演示视频 Mind+中Python代码: #I2C PAJ7620U2手势传感器 #接线:使用windows或linux电脑连接一块arduino主控板,手势传感器接到I2C口SCL SDA from vpython import * import time from pinpong.board import Board from pinpong.libs.dfrobot_paj7620u2 import PAJ7620U2,Gesture import pyttsx3 engine = pyttsx3.init() Board("uno").begin() #初始化,选择板型和端口号,不输入端口号则进行自动识别 Box = box(pos=vector(0,0,0), axis = vector(10,20,10),size=vector(20,20,20), color=color.green) label( pos=vector(0,15,0), text='YunTian' ) t = 1 paj = PAJ7620U2() paj.set_gesture_high_rate() #设置高速模式 #paj.set_gesture_low_rate() #设置低速模式 Gesture.print_all() def LEFT(): engine.say("左转") engine.runAndWait() for i in range(360): rate(100) Box.rotate(angle=radians(-t),axis = vector(0,1,0),origin=vector(0,0,0)) def RIGHT(): engine.say("右转") engine.runAndWait() for i in range(360): rate(100) Box.rotate(angle=radians(t),axis = vector(0,1,0),origin=vector(0,0,0)) def UP(): engine.say("上转") engine.runAndWait() for i in range(360): rate(100) Box.rotate(angle=radians(-t),axis = vector(1,0,0),origin=vector(0,0,0)) def DOWN(): engine.say("下转") engine.runAndWait() for i in range(360): rate(100) Box.rotate(angle=radians(t),axis = vector(1,0,0),origin=vector(0,0,0)) while True: description,gesture = paj.get_gesture() if description == "Left": LEFT() if description == "Right": RIGHT() if description == "Up": UP() if description == "Down": DOWN() 【旋转3D文字】 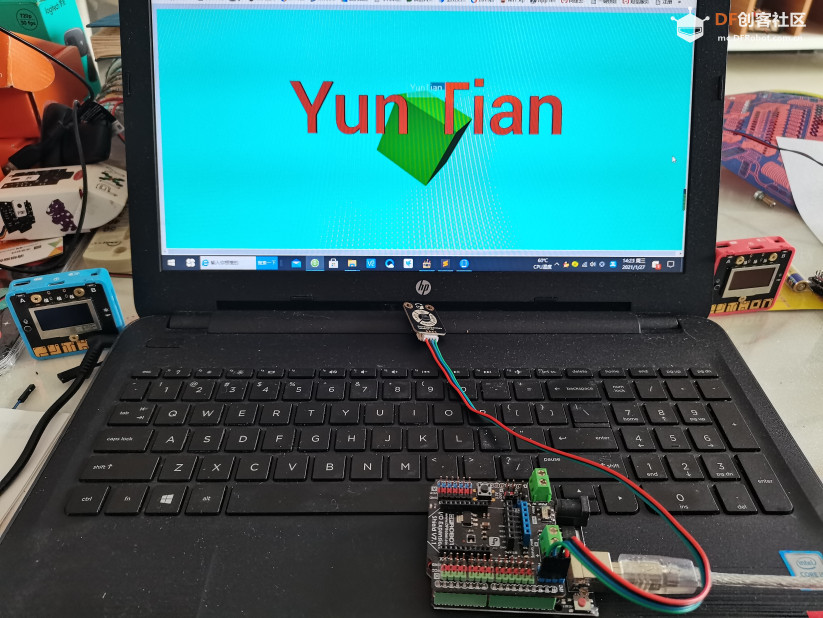 演示视频 编程代码 #I2C PAJ7620U2手势传感器 #接线:使用windows或linux电脑连接一块arduino主控板,手势传感器接到I2C口SCL SDA from vpython import * import time from pinpong.board import Board from pinpong.libs.dfrobot_paj7620u2 import PAJ7620U2,Gesture import pyttsx3 engine = pyttsx3.init() Board("uno").begin() #初始化,选择板型和端口号,不输入端口号则进行自动识别 scene2 = canvas(width=900, height=400, center=vector(0,0,0), background=color.cyan) Box = box(pos=vector(0,0,0), axis = vector(10,20,10),size=vector(20,20,20), color=color.green) label( pos=vector(0,15,0), text='YunTian' ) T = text(pos=vector(0,0,50),text='Yun Tian', align='center', color=color.red) T.height = 5 * T.height T.length = 5 * T.length t = 1 paj = PAJ7620U2() paj.set_gesture_high_rate() #设置高速模式 #paj.set_gesture_low_rate() #设置低速模式 Gesture.print_all() def LEFT(): engine.say("左转") engine.runAndWait() for i in range(360): rate(100) Box.rotate(angle=radians(-t),axis = vector(0,1,0),origin=vector(0,0,0)) T.rotate(angle=radians(-t),axis = vector(0,1,0),origin=vector(0,0,0)) def RIGHT(): engine.say("右转") engine.runAndWait() for i in range(360): rate(100) Box.rotate(angle=radians(t),axis = vector(0,1,0),origin=vector(0,0,0)) T.rotate(angle=radians(t),axis = vector(0,1,0),origin=vector(0,0,0)) def UP(): engine.say("上转") engine.runAndWait() for i in range(360): rate(100) Box.rotate(angle=radians(-t),axis = vector(1,0,0),origin=vector(0,0,0)) T.rotate(angle=radians(-t),axis = vector(1,0,0),origin=vector(0,0,0)) def DOWN(): engine.say("下转") engine.runAndWait() for i in range(360): rate(100) Box.rotate(angle=radians(t),axis = vector(1,0,0),origin=vector(0,0,0)) T.rotate(angle=radians(t),axis = vector(1,0,0),origin=vector(0,0,0)) while True: description,gesture = paj.get_gesture() if description == "Left": LEFT() if description == "Right": RIGHT() if description == "Up": UP() if description == "Down": DOWN() 备注:程序中不能设置 文字深度(depth),出现如下错误,如果解决这个问题,会出另一个问题(我解决不了,呼叫DF技术员) 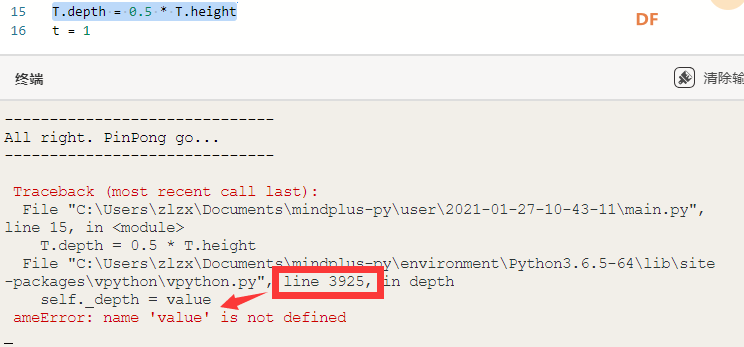 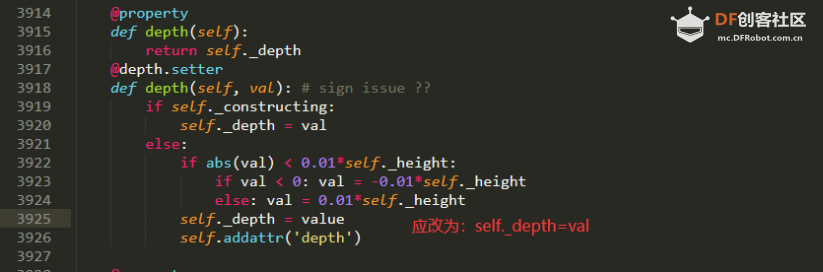 【彩蛋】 闺女手工刻制年画 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






