|
9167| 0
|
[《树莓派4B系列教程》] 树莓派4B系列教程第8课 JoyStick摇杆 |

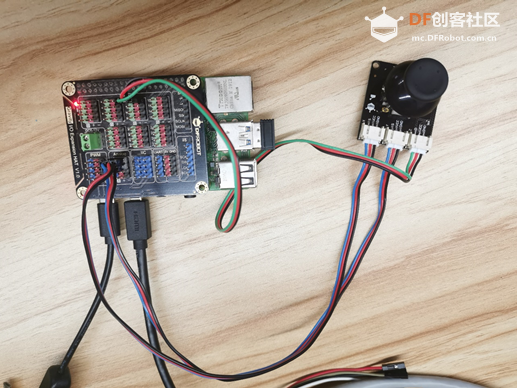
第8课:JoyStick摇杆学习内容介绍JoyStick摇杆DFRobot的JoyStick摇杆采用原装优质金属PS2摇杆电位器制作,具有(X,Y)2轴模拟输出,(Z)1路按钮数字输出。不管你怎么折腾,它都能保持良好的接触和机械性能。3路信号分别通过3P线接到Arduino传感器扩展板,只需占用3个端口就可以控制了。 新版摇杆特性:
注意事项 新版模拟传感器的端口布局具备以下两项改进。请参考我们博客中 "如何更改数据线接头布局" 的说明,当在IO扩展板上使用该传感器时,你可能会需要调整接头的布局。为了方便您的使用,我们将会做出更多改进,尽请关注。
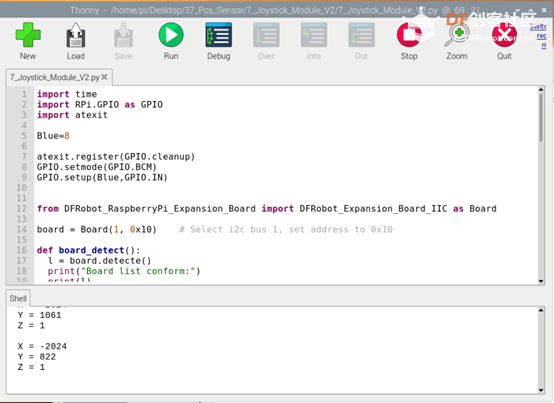
在树莓派上使用joystick摇杆**">在树莓派上使用JoyStick摇杆
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






