|
37638| 4
|
[项目] drawbot 桌面级scara机械臂 |

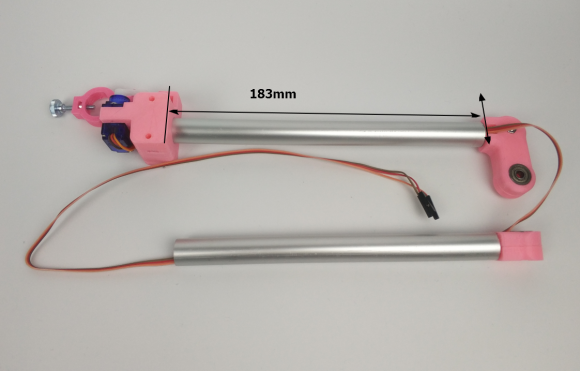
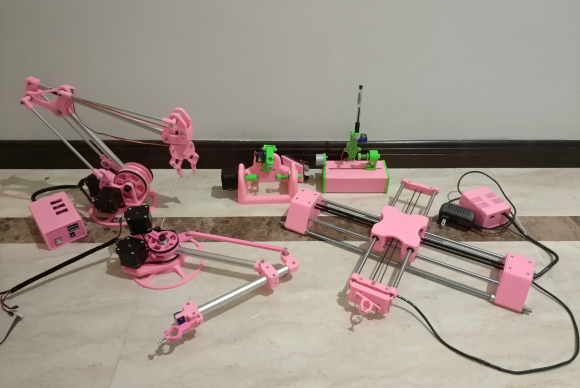
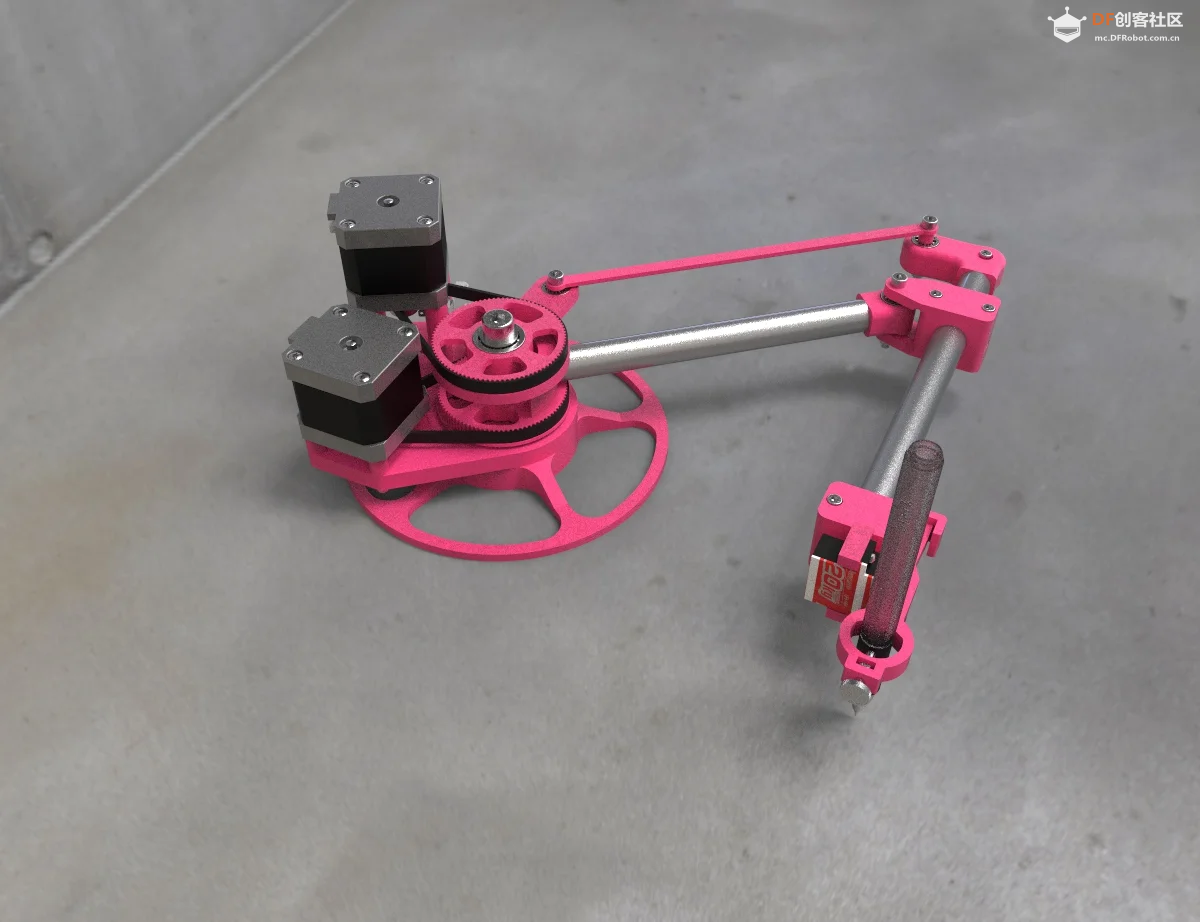 在thingiverse上闲逛的时候,翻到了一个好几年前的机械臂项目,一下子就被这骚粉色吸引了。桌面级scara机械臂,运动机构为两个42步进电机和一个9g舵机,控制板为mega 2560 和ramps 1.4,其他部件主要为3D打印件,工作范围为A4纸,使用国标G代码,目前可以实现写字画画功能。  作者自己为了方便在淘宝开了店:点击前往 drawbot 所用零件除打印件和铝管外均为标件,tb上都能买到。打印件tb上也有代打的,当然也可以找我打。 bom 表已整理完成,见下表。螺钉螺母数量可能不准确,建议多备几颗。舵机线长度需要80cm,长度不够的,需要自己接延长线。M8x55六角螺钉可用Φ8x40xM8 塞打螺钉代替,提高两个驱动轮同轴度。 步进电机和限位开关线长度为40cm。 铝管长度为178mm 200mm(老款笔夹) 178mm 197mm(新款笔夹),bom中长度有误,请注意。 材料清单
软件需要使用的软件主要如下 下面是作者更新过的清单
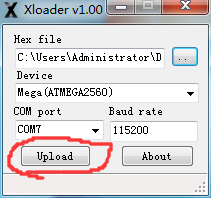
将mega2560连接电脑,选择对应的端口,用xloader烧录hex固件。
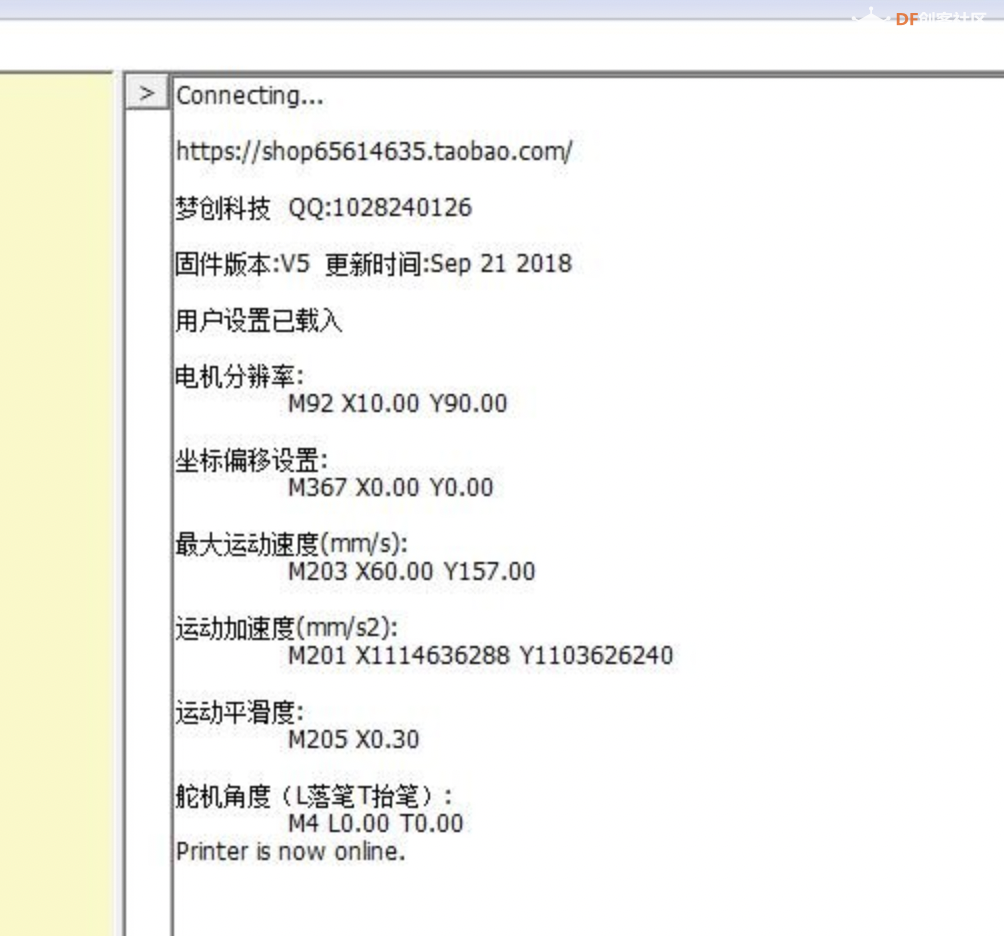
软件界面介绍如下 常用的控制指令如下:
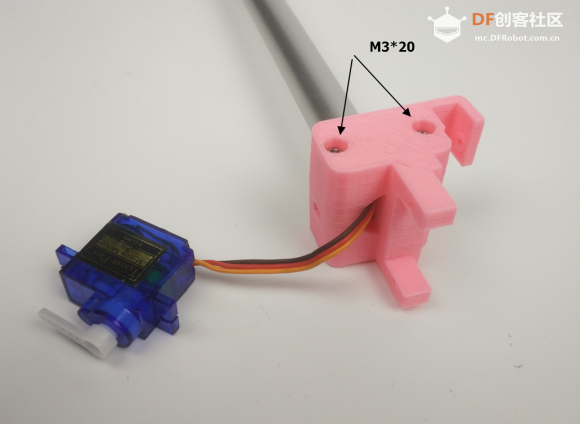
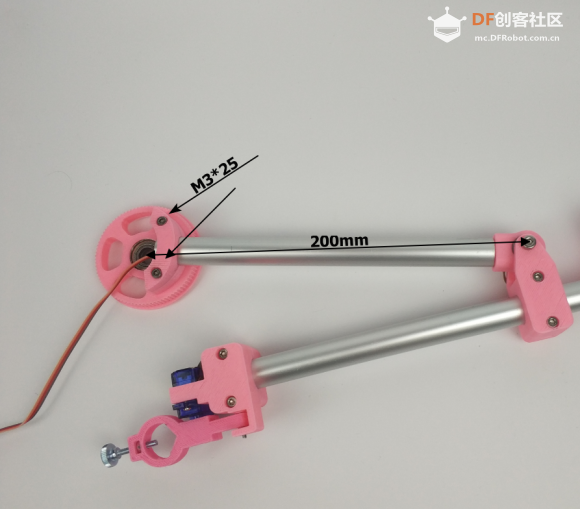
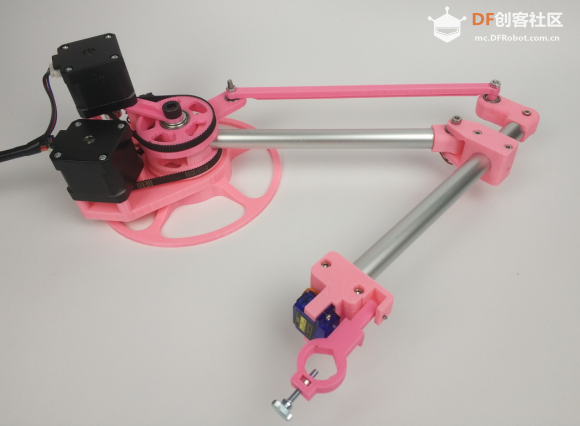
所有参数修改后需用M500保存,否则重启后数据会丢失 首次连接后需要先发送M502恢复出厂设置,然后将机器摆成图示角度,点击自动标定按钮,数秒后标定完成,然后发送M500指令保存设置 发送G28回到HOME点,导入G代码生成软件导出的G代码,就可以开始愉快的写字了。写字测试,由于抬笔结构为旋转式抬笔,速度太快写字会飘,后续考虑改结构,做成直上直下结构。 模型下载地址:https://www.thingiverse.com/thing:3096135 制作过程舵机线不够长的,先将线加长到80cm,在较长的一根铝管一端装上舵机支架,将舵机线穿入管内
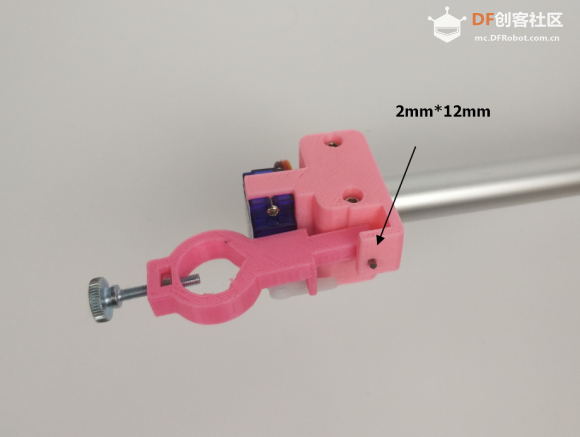
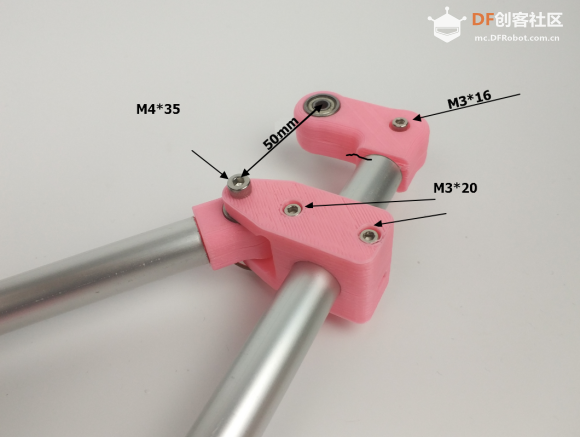
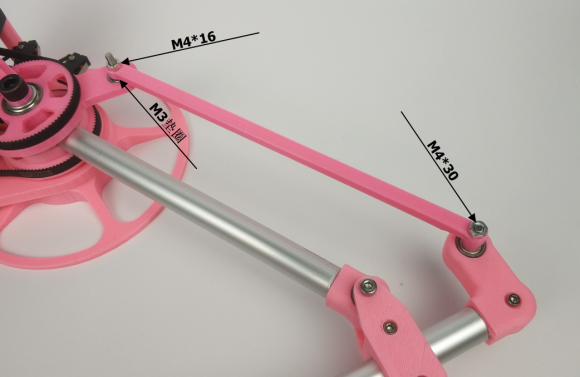
安装连接件
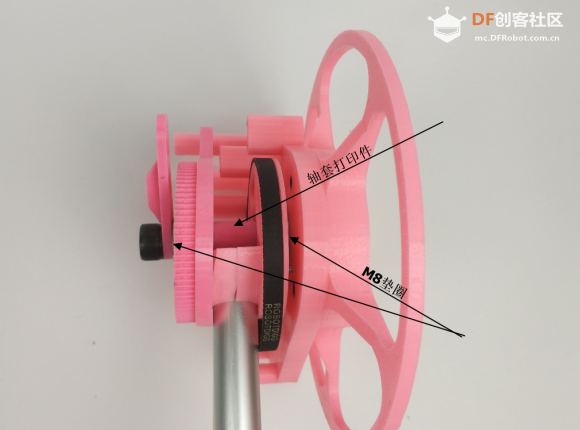
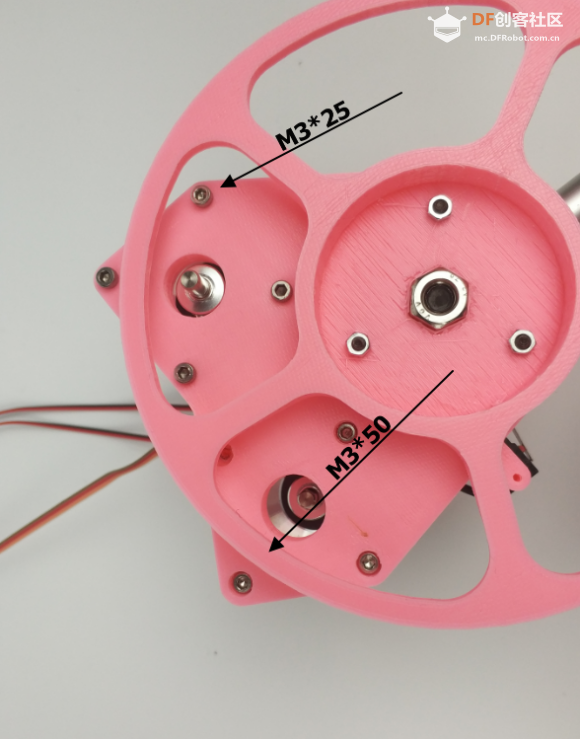
安装皮带轮,提前套入同步带,不要漏了
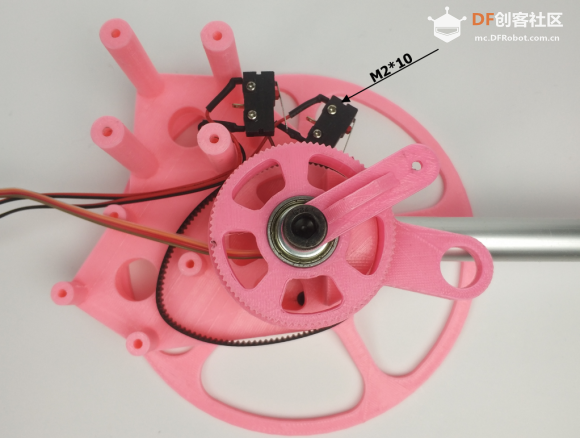
限位开关为常闭型,如果买的常开型,自己改下线,接触片朝下。
有个螺孔被挡住了,3颗勉强固定,网上底座图纸孔位已更新
两个M4螺钉反装如图,正装转动螺母会松
插上电机线,裹上束线管,机械部分就算完成了
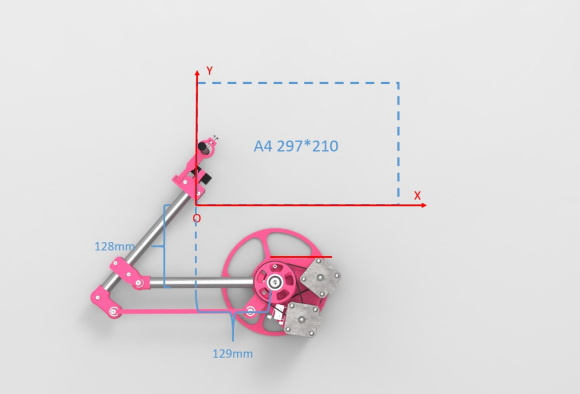
坐标系定义如下,X轴平行于电机座侧边,原点相对于旋转中心偏移如下
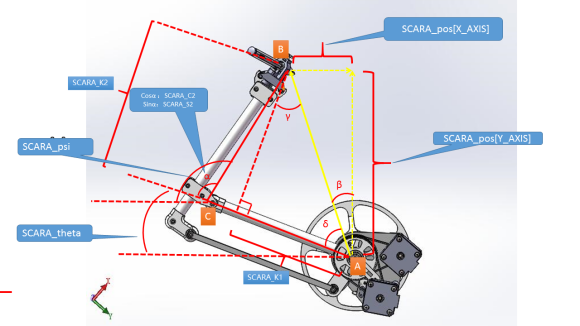
代码控制板作为下位机,他的作用是解释上位机发过来的G代码,G代码包含运动坐标值和一些控制指令,对于运动控制,下位机就是将G代码转换成步进电机的脉冲控制步进电机。这里比较关键的就是坐标正解反解函数,已知末端坐标值求出机械臂的角度,或已知机械臂的角度求出末端坐标值。 和drawbot一样的平行四边形结构,副臂电机控制的副臂相对于世界坐标系的角度,即“绝对角度”scara 通过同步带传送,将电机移动到固定底座上,也为“绝对角度”scara 两种结构运动算法稍微有点区别。marlin 自带的scara算法属于“相对角度”scara,这里容易被忽略。 SCARA_RAD2DEG弧度角度转换常数,即180/π。三角函数计算是弧度计算,所以所有角度需先转换成弧度。通过三角函数关系算出x_sin x_cos y_sin y_cos. 则图中黄色向量表示世界坐标系下的末端位置,(-x_cos - y_cos,x_sin + y_sin ) 。再减去用户坐标偏移SCARA_offset,得到用户坐标系下的末端坐标值。 反解算法如下
cartesian[X_AXIS][Y_AXIS]为用户坐标系下坐标值,加上SCARA_offset得到世界坐标系下坐标值。 其中SCARA_pos[X_AXIS]向量方向向右,与原坐标值X方向相反,故取反。
L1_2 L2_2是预先定义好的臂长的平方 则直线AB距离的平方为 sq(SCARA_pos[X_AXIS]) + sq(SCARA_pos[Y_AXIS] 三角形ABC中,现已知三边长度,由余弦定理推出 cosC=(a^2+b^2-c^2)/2ab α的补角为 arccos [ ( (float)L1_2 + (float)L2_2- sq(SCARA_pos[X_AXIS]) - sq(SCARA_pos[Y_AXIS]) ) /(2Linkage_1Linkage_2) ]//这里是伪代码,C语言没有arccos函数 SCARA_C2为补角的cos值得取反 SCARA_C2 = ( sq(SCARA_pos[X_AXIS]) + sq(SCARA_pos[Y_AXIS]) - (float)L1_2 - (float)L2_2 ) /(2Linkage_1Linkage_2); 将α cos值转换为sin值 SCARA_S2 = sqrt( 1 - sq(SCARA_C2) ); 根据三角函数关系求出 SCARA_K1 SCARA_K2 由图可知SCARA_theta +δ+β =π/2 δ+γ =π/2 则SCARA_theta =γ-β = ( atan2(SCARA_K1, SCARA_K2)-atan2(SCARA_pos[X_AXIS],SCARA_pos[Y_AXIS]) ) SCARA_psi = α+SCARA_theta = atan2(SCARA_S2,SCARA_C2) + SCARA_theta 乘上弧度角度转换因子得出大小臂角度值 delta[X_AXIS] = SCARA_theta SCARA_RAD2DEG 更新:
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 膜拜巨佬!!!666666!
膜拜巨佬!!!666666!

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






