|
86222| 0
|
[人工智能机器人学导论] 看完这8篇论文,你会完全掌握桌面六轴协作机器人! |
|
[color=rgba(0, 0, 0, 0.65)]协作机器人(collaborative robot)简称cobot或co-robot,是设计和人类在共同工作空间中有近距离互动的机器人,是人类和电脑控制的通用机器人之间的直接物理互动的设备。 [color=rgba(0, 0, 0, 0.65)]协作机器人的机能包括了和人类近距离互动合作、对周围人类进行安全保护。 [color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)]今天,给大家推荐一些协作机器人的论文,这些论文均来自国内外各所知名高校,这8篇论文资料,主要使用的产品是桌面六轴协作机器人mycobot系列,建议收藏学习。  ① 使用SVM、Haar Cascade分类器和机械臂检测使用口罩防止COVID-19传播的情况 [color=rgba(0, 0, 0, 0.65)]作者:Andini Pratiwi, Erna Budhiarti Nababan , Amalia [color=rgba(0, 0, 0, 0.65)]大学:苏门答腊大学计算机科学和信息技术学院,印度尼西亚 [color=rgba(0, 0, 0, 0.65)]摘要:需要进行监测,通过实施使用口罩等卫生协议,特别是对那些不戴口罩或仍有问题的人,保持COVID-19病例的传播率。在这项研究中,系统利用机器人的力量来识别访客是否戴口罩,如果检测到用户没有戴口罩,则自动分发口罩。用户脸部检测过程中使用Haar Cascade分类器算法来裁剪图像,聚焦于脸部区域,并使用SVM(支持向量机)对是否戴口罩的用户进行分类。对于被检测为不戴口罩的用户,myCobot Pi在吸气泵的支持下,将向用户分发口罩。使用myCobot-Pi作为基于树莓派的机械臂,可以在最小规格和尺寸的设备上应用该系统。通过采取41个检测案例的试验,发现有29个案例成功地检测到口罩的正确使用。此外,在这项研究中,我们使用PP片状塑料保护器来代替口罩包装,因为它可以由吸气泵正常携带。 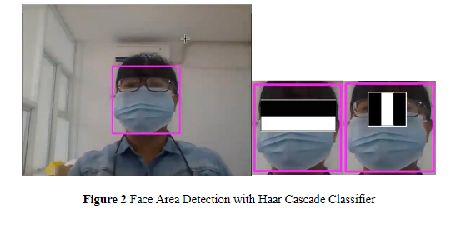 ②基于眼动追踪的非侵入式机械臂控制系统 [color=rgba(0, 0, 0, 0.65)]作者:Zichen Kong, Shuying Rao, Hui Yang, Wenli Lan, Yue Leng, Sheng Ge [color=rgba(0, 0, 0, 0.65)]大学:东南大学 [color=rgba(0, 0, 0, 0.65)]摘要:有严重语言和运动障碍的人,由于无法有效的控制肌肉的移动,可能存在与外部世界沟通困难的情况。在本研究中,开发了一种基于眼动追踪的非侵入式机械臂控制系统。在充分考虑机械臂的空间特性后,进行了以用户为中心的设计过程,其中包含八个命令和一个中间实时视频传输用户界面。此外,评估了三种眼动注视点处理算法。其中,基于密度的空间聚类和噪声算法的平均准确率达到了 99.3%。在此基础上,设计并进行了离线实验,5名被试都能够发送准确率高于 99% 的命令。 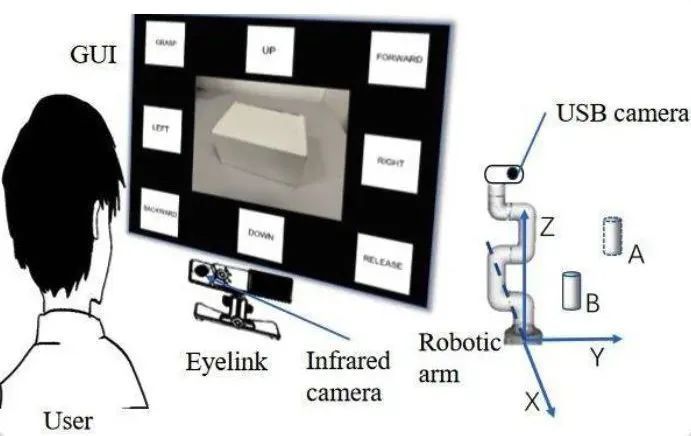 ③ 考虑到身体时空变化的低刚度机器人视觉伺服的自我监督学习 [color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)]作者:Kento Kawaharazuka, IEEE会员 [color=rgba(0, 0, 0, 0.65)]大学:澳大利亚莫纳什大学 [color=rgba(0, 0, 0, 0.65)]摘要:在这项研究中,我们研究了在低刚度机器人中通过视觉伺服来抓取物体。与刚性机器人相比,低刚度机器人很难按预期处理自己的身体,视觉和身体之间的校准需要一些时间。此外,机器人必须不断适应其身体的变化,如相机位置的变化和因老化而导致的关节变化。因此,我们开发了一种方法,让低硬度机器人自主地学习其身体的视觉伺服。我们还开发了一种机制,可以根据时间上的身体变化来适应性地改变其视觉伺服状态。我们将方法应用于一个低刚度的6轴机械臂-MyCobot,并通过进行基于视觉伺服的物体抓取实验确认其有效性。  ④ 机器人触摸发送慰问:发送者和接收者的不同观点 [color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)]作者:Rachel H. Y. Au、Katrina Ling、Marlena R. Fraune [color=rgba(0, 0, 0, 0.65)]大学:新墨西哥州立大学、丰田研究院 [color=rgba(0, 0, 0, 0.65)]摘要:为了减少社会孤立感,人们越来越严重地依赖在线社会交流方法。然而,这种交流方式缺乏表达情感安慰人的最关键因素之一:身体接触。在目前的工作中,我们研究了人们对具有情感触摸功能的机器人的看法,对具有情感触摸功能的机器人传达来自另一个人的同情心的看法。 [color=rgba(0, 0, 0, 0.65)]我们在美国和日本进行了两项在线研究,调查个人如何评价由他们发送给朋友的想象中的机器人触摸手势(研究1)和由他们从朋友那里收到的机器人触摸手势(研究2)。我们发现,与其他类型的触摸相比,同情的发送者喜欢机器人拍打或摩擦肩膀,但更愿意通过文字或GIF来表达同情,而不是通过机器人介导的触摸。相反,与其他一些表达同情的方式,特别是短文相比,接受者在收到机器人触摸手势表示同情时,会感受到更多的同情和社会支持。目前的研究结果强调了发送者和接受者对机器人情感触摸的不同观点,以及对机器人情感触摸评价的潜在文化和个体差异。  ⑤ 机械手臂的抓取状态的可视化 [color=rgba(0, 0, 0, 0.65)]作者:Haruka Hyodo和Yasuyuki Yamada,IEEE会员 [color=rgba(0, 0, 0, 0.65)]大学:澳大利亚莫纳什大学 [color=rgba(0, 0, 0, 0.65)]摘要:当机器或机器人在位置控制下工作时,根据机器人外观的视觉变化,很难直观地确认机器人对施加在物体上的力的反应,或要互动的物体的硬度或质量。当人类和机器人在同一空间内合作或工作时,如果我们能从视觉上理解机器人,了解机器人的状态,互动将更加顺利和安全。 [color=rgba(0, 0, 0, 0.65)]此外,目前正在研究能够灵活地适应人和各种外部环境的软体机器人技术。在本研究中,我们的目标是开发一种技术,可以传达软体机器人的状态,该机器人可以根据目标物体的变形情况,明确地改变其外观。我们试图通过放大由光弹性效应引起的颜色变化,使软体机器人的内部压力可视化。放大由光弹性效应引起的颜色变化使用折纸和kirigami结构。此外,作为一项可行性研究,我们开发了一个软体机器人手,可以直观地表明被抓取物体的质量和硬度。 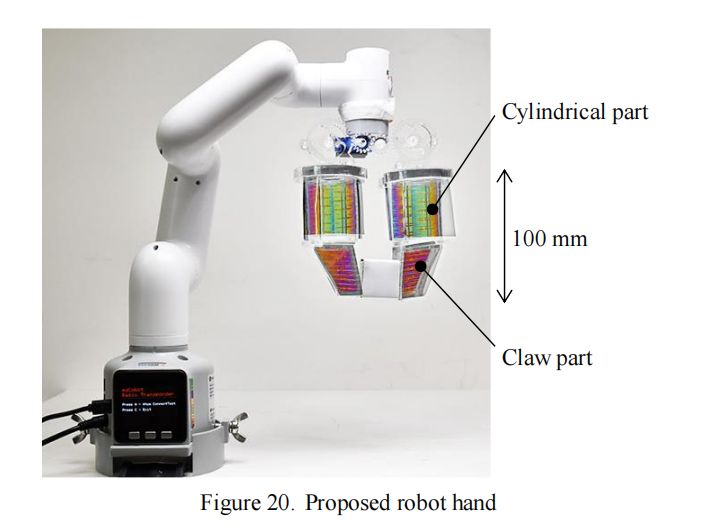 ⑥人机协作! 关于人类和机器人之间的物理合作所产生的统一感 [color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)]作者:住田拓郎、 上村綜次郎、長谷川孔明、 岡田美智男、大島直樹 [color=rgba(0, 0, 0, 0.65)]大学:日本丰桥技术科学大学 [color=rgba(0, 0, 0, 0.65)]摘要:人与人之间共同实现某种目标需要合作。人和机器人,或者机器人之间,有没有可能按照对方的 "我希望你这样做 "的感觉来行动? [color=rgba(0, 0, 0, 0.65)]人类和机器人,或者机器人和人类以及机器人,是否有可能对对方的 "我希望你这样做 "的感觉做出反应?在这个演讲中,我们将讨论人类与机器人通过物理合作为实现目标作出贡献的可能性。 [color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)]我们提出了一个机器人,通过使人和机器人为实现一个目标而互相帮助,并伴随着身体的协调,创造一种团结的感觉。 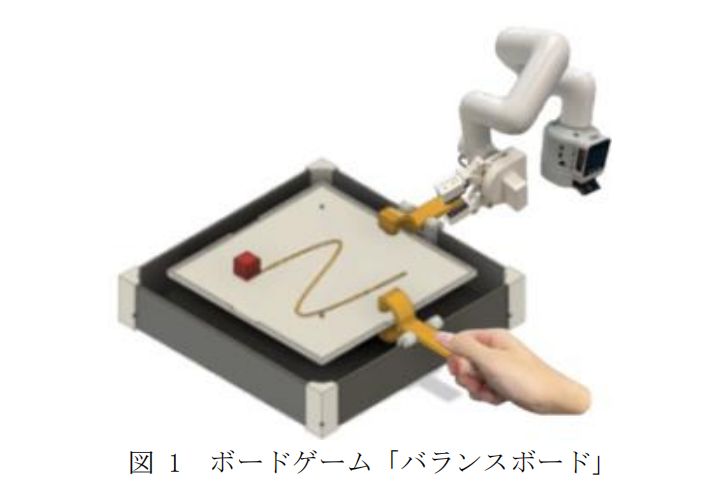 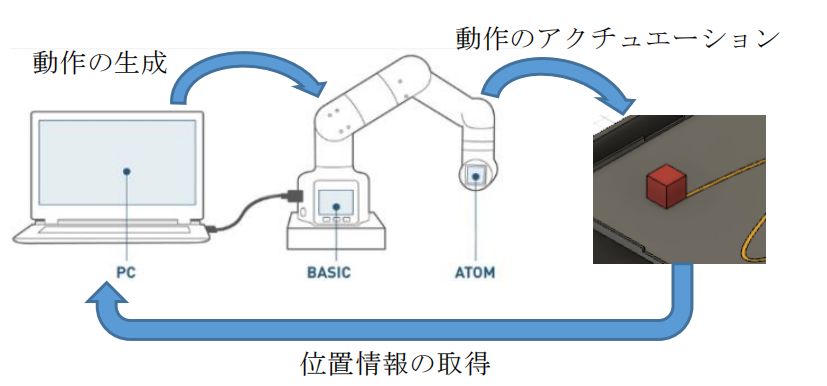 ⑦ 软体机器人的触觉传感系统[color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)]作者:Taiki Majima1 和Kazunori Takashio2 [color=rgba(0, 0, 0, 0.65)]大学:澳大利亚莫纳什大学 [color=rgba(0, 0, 0, 0.65)]摘要:在这项研究中,我们提出了一个名为SoftTactile skIn (STI) 的系统,它由一个人造外皮和细胞组成。STI可以连接到现有的机器人上,使其具有灵活性和触觉。人工外皮采用海绵结构,易于获得和加工,而光学传感器是一个小型的光反射器。为了处理多个细胞作为一个表面的信息,我们的系统根据传感器的数值生成图像,并使用卷积神经网络估计状态,该网络在图像识别领域表现出良好的性能。 [color=rgba(0, 0, 0, 0.65)]该系统的触觉传感器能够在特定条件下以91.4%的准确率估计接触位置,并以81.0%的准确率估计五个接触动作。STI有望在未来扩大软体机器人的人机交瓦(HRI)的范围。本文的贡献在于提出了一种为基于传统机器人的软体机器人提供触觉传感器的方法,该方法结合了细胞-皮肤和光学传感器的特点,能够在不把细胞铺满整个表面的情况下进行大范围的表面感应。 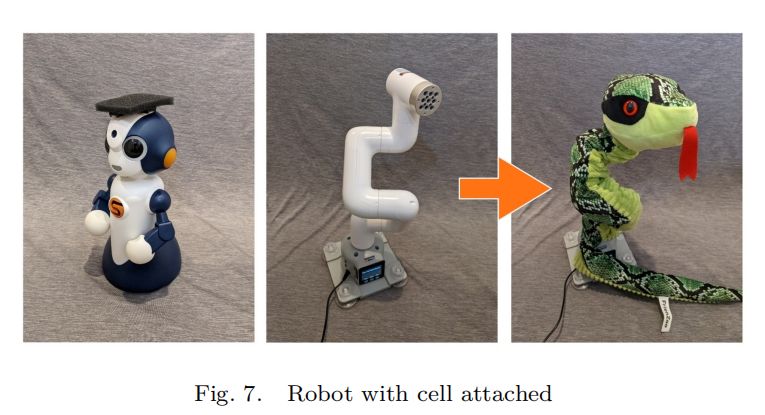 ⑧ 协作机器人智能控制与人机交互研究综述[color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)] [color=rgba(0, 0, 0, 0.65)]作者:黄海丰,刘培森,李擎苣,于欣波 [color=rgba(0, 0, 0, 0.65)]大学:北京科技大学 [color=rgba(0, 0, 0, 0.65)]摘 要 :协作机器人是一类能够在共享空间中与人类交互或在人类附近安全工作的新型工业机器人,由于其轻质、安全的特点,在柔性制造、社会服务、医疗健康、防灾抗疫等多个领域展现出了良好的应用前景,受到工业界和学术界的广泛关注,成为当前机器人领域的研究热点之一。 [color=rgba(0, 0, 0, 0.65)]协作机器人需要具备良好的控制性能确保与人交互的安全性,集成多种传感器感知外 部环境并应用智能控制理论与方法来确保高效的协作行为。 [color=rgba(0, 0, 0, 0.65)] 在我国,人机协作已列入《智能制造 2025》和《新一代人工智能发 展规划》重点支持研究计划。 [color=rgba(0, 0, 0, 0.65)]本文主要介绍了国内外几款常见的协作机器人,机器人基于感知信息的控制、高精度跟踪控 制、交互控制等智能控制方法,并围绕机器人与人执行协作任务的高效性,对机器人的人类意图估计和技能学习方法进行了讨论。最终对协作机器人未来的发展方向进行了展望.  [color=rgba(0, 0, 0, 0.65)]最后,想要获取这些论文?大象wx:1 8 1 2 3 8 4 1 9 2 3,备注【论文资料】,就会给你论文啦! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






