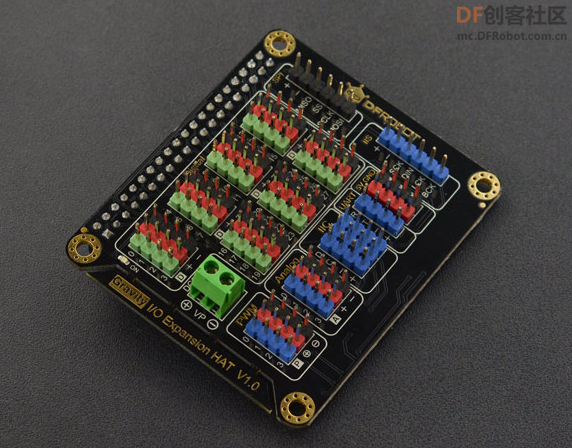
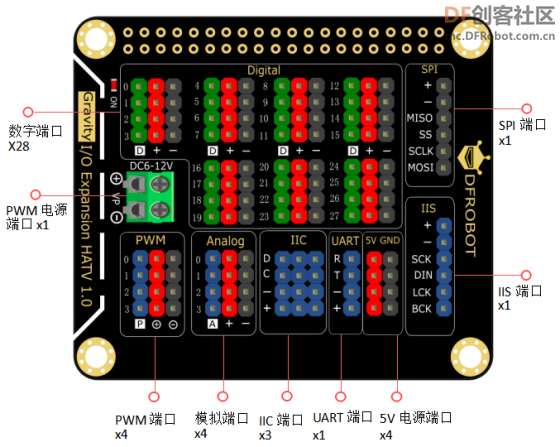
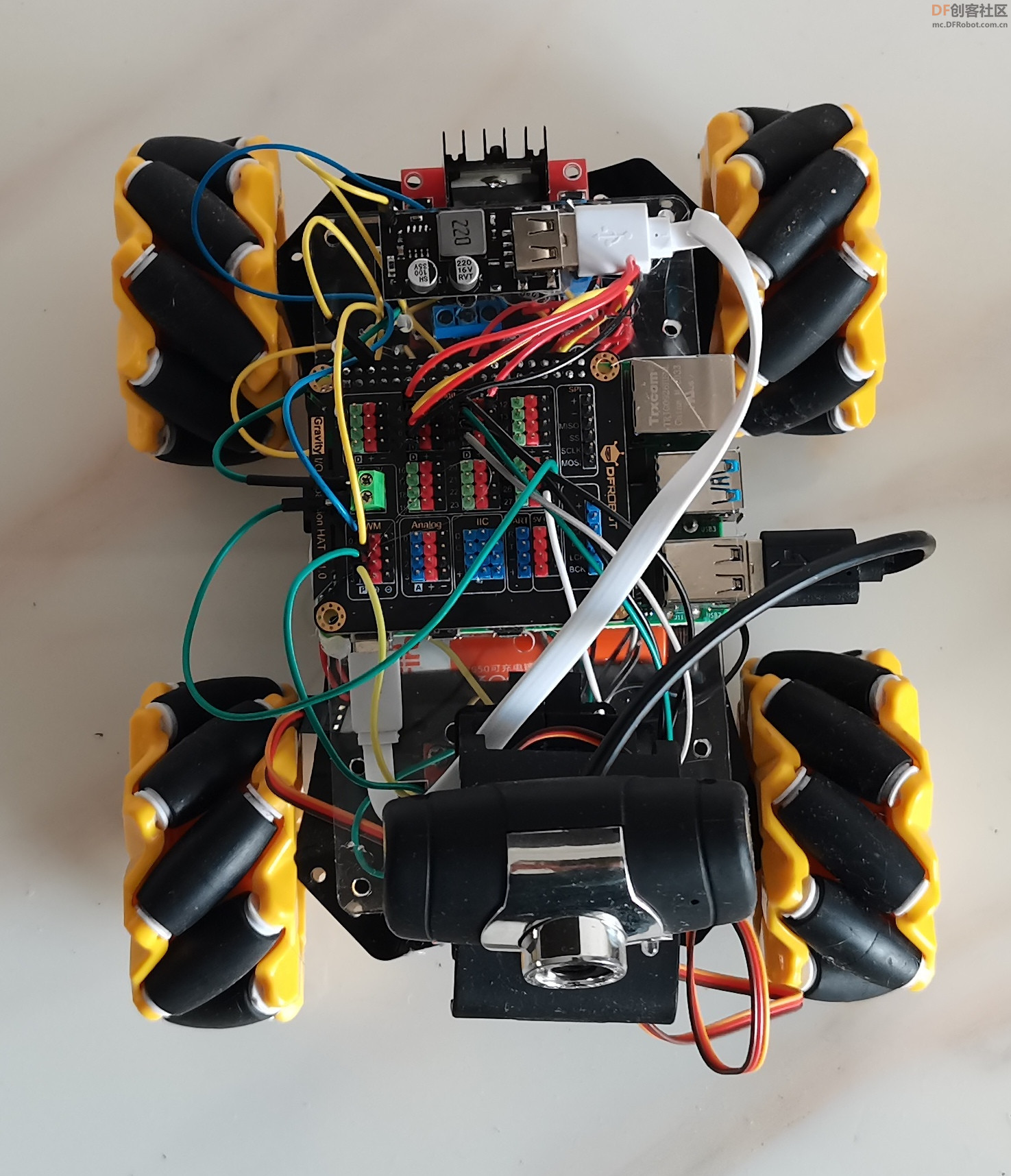
【PWM端口 PWM端口:IO扩展板提供了四组PWM端口,连接到STM32的PWM端,树莓派通过I2C通讯将数据发送给STM32实现控制。 BOARD.py
# -*- coding:utf-8 -*-
'''!
@file DFRobot_RaspberryPi_Expansion_Board.py
@brief This RaspberryPi expansion board can communicate with RaspberryPi via I2C. It has 10 GPIOs, 1 SPI, 4 I2Cs and 1 uart.
@copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
@license The MIT License (MIT)
@author Frank(jiehan.guo@dfrobot.com)
@version V1.0
@date 2019-3-28
@url https://github.com/DFRobot/DFRobot_RaspberryPi_Expansion_Board
'''
import time
_PWM_CHAN_COUNT = 4
_ADC_CHAN_COUNT = 4
class DFRobot_Expansion_Board:
_REG_SLAVE_ADDR = 0x00
_REG_PID = 0x01
_REG_VID = 0x02
_REG_PWM_CONTROL = 0x03
_REG_PWM_FREQ = 0x04
_REG_PWM_DUTY1 = 0x06
_REG_PWM_DUTY2 = 0x08
_REG_PWM_DUTY3 = 0x0a
_REG_PWM_DUTY4 = 0x0c
_REG_ADC_CTRL = 0x0e
_REG_ADC_VAL1 = 0x0f
_REG_ADC_VAL2 = 0x11
_REG_ADC_VAL3 = 0x13
_REG_ADC_VAL4 = 0x15
_REG_DEF_PID = 0xdf
_REG_DEF_VID = 0x10
''' Enum board Analog channels '''
A0 = 0x00
A1 = 0x01
A2 = 0x02
A3 = 0x03
''' Board status '''
STA_OK = 0x00
STA_ERR = 0x01
STA_ERR_DEVICE_NOT_DETECTED = 0x02
STA_ERR_SOFT_VERSION = 0x03
STA_ERR_PARAMETER = 0x04
''' last operate status, users can use this variable to determine the result of a function call. '''
last_operate_status = STA_OK
''' Global variables '''
ALL = 0xffffffff
def _write_bytes(self, reg, buf):
pass
def _read_bytes(self, reg, len):
pass
def __init__(self, addr):
self._addr = addr
self._is_pwm_enable = False
def begin(self):
'''
@brief Board begin
@return Board status
'''
pid = self._read_bytes(self._REG_PID, 1)
vid = self._read_bytes(self._REG_VID, 1)
if self.last_operate_status == self.STA_OK:
if pid[0] != self._REG_DEF_PID:
self.last_operate_status = self.STA_ERR_DEVICE_NOT_DETECTED
elif vid[0] != self._REG_DEF_VID:
self.last_operate_status = self.STA_ERR_SOFT_VERSION
else:
self.set_pwm_disable()
self.set_pwm_duty(self.ALL, 0)
self.set_adc_disable()
return self.last_operate_status
def set_addr(self, addr):
'''
@brief Set board controler address, reboot module to make it effective
@param address: int Address to set, range in 1 to 127
'''
if addr < 1 or addr > 127:
self.last_operate_status = self.STA_ERR_PARAMETER
return
self._write_bytes(self._REG_SLAVE_ADDR, [addr])
def _parse_id(self, limit, id):
ld = []
if isinstance(id, list) == False:
id = id + 1
ld.append(id)
else:
ld = [i + 1 for i in id]
if ld == self.ALL:
return range(1, limit + 1)
for i in ld:
if i < 1 or i > limit:
self.last_operate_status = self.STA_ERR_PARAMETER
return []
return ld
def set_pwm_enable(self):
'''
@brief Set pwm enable, pwm channel need external power
'''
self._write_bytes(self._REG_PWM_CONTROL, [0x01])
if self.last_operate_status == self.STA_OK:
self._is_pwm_enable = True
time.sleep(0.01)
def set_pwm_disable(self):
'''
@brief Set pwm disable
'''
self._write_bytes(self._REG_PWM_CONTROL, [0x00])
if self.last_operate_status == self.STA_OK:
self._is_pwm_enable = False
time.sleep(0.01)
def set_pwm_frequency(self, freq):
'''
@brief Set pwm frequency
@param freq: int Frequency to set, in range 1 - 1000
'''
if freq < 1 or freq > 1000:
self.last_operate_status = self.STA_ERR_PARAMETER
return
is_pwm_enable = self._is_pwm_enable
self.set_pwm_disable()
self._write_bytes(self._REG_PWM_FREQ, [freq >> 8, freq & 0xff])
time.sleep(0.01)
if is_pwm_enable:
self.set_pwm_enable()
def set_pwm_duty(self, chan, duty):
'''
@brief Set selected channel duty
@param chan: list One or more channels to set, items in range 1 to 4, or chan = self.ALL
@param duty: float Duty to set, in range 0.0 to 100.0
'''
if duty < 0 or duty > 100:
self.last_operate_status = self.STA_ERR_PARAMETER
return
for i in self._parse_id(_PWM_CHAN_COUNT, chan):
self._write_bytes(self._REG_PWM_DUTY1 + (i - 1) * 2, [int(duty), int((duty * 10) % 10)])
def set_adc_enable(self):
'''
@brief Set adc enable
'''
self._write_bytes(self._REG_ADC_CTRL, [0x01])
def set_adc_disable(self):
'''
@brief Set adc disable
'''
self._write_bytes(self._REG_ADC_CTRL, [0x00])
def get_adc_value(self, chan):
'''
@brief Get adc value
@param chan: int Channel to get, in range 1 to 4, or self.ALL
@return :list List of value
'''
for i in self._parse_id(_ADC_CHAN_COUNT, chan):
rslt = self._read_bytes(self._REG_ADC_VAL1 + (i - 1) * 2, 2)
return ((rslt[0] << 8) | rslt[1])
def detecte(self):
'''
@brief If you forget address you had set, use this to detecte them, must have class instance
@return Board list conformed
'''
l = []
back = self._addr
for i in range(1, 127):
self._addr = i
if self.begin() == self.STA_OK:
l.append(i)
for i in range(0, len(l)):
l[i] = hex(l[i])
self._addr = back
self.last_operate_status = self.STA_OK
return l
class DFRobot_Epansion_Board_Digital_RGB_LED():
def __init__(self, board):
'''
@param board: DFRobot_Expansion_Board Board instance to operate digital rgb led, test LED: https://www.dfrobot.com/product-1829.html
Warning: LED must connect to pwm channel, otherwise may destory Pi IO
'''
self._board = board
self._chan_r = 0
self._chan_g = 0
self._chan_b = 0
def begin(self, chan_r, chan_g, chan_b):
'''
@brief Set digital rgb led color channel, these parameters not repeat
@param chan_r: int Set color red channel id, in range 1 to 4
@param chan_g: int Set color green channel id, in range 1 to 4
@param chan_b: int Set color blue channel id, in range 1 to 4
'''
if chan_r == chan_g or chan_r == chan_b or chan_g == chan_b:
return
if chan_r < _PWM_CHAN_COUNT and chan_g < _PWM_CHAN_COUNT and chan_b < _PWM_CHAN_COUNT:
self._chan_r = chan_r
self._chan_g = chan_g
self._chan_b = chan_b
self._board.set_pwm_enable()
self._board.set_pwm_frequency(1000)
self._board.set_pwm_duty(self._board.ALL, 100)
def color888(self, r, g, b):
'''
@brief Set LED to true-color
@param r: int Color components red
@param g: int Color components green
@param b: int Color components blue
'''
self._board.set_pwm_duty([self._chan_r], 100 - (r & 0xff) * 100 // 255)
self._board.set_pwm_duty([self._chan_g], 100 - (g & 0xff) * 100 // 255)
self._board.set_pwm_duty([self._chan_b], 100 - (b & 0xff) * 100 // 255)
def color24(self, color):
'''
@brief Set LED to 24-bits color
@param color: int 24-bits color
'''
color &= 0xffffff
self.color888(color >> 16, (color >> 8) & 0xff, color & 0xff)
def color565(self, color):
'''
@brief Set LED to 16-bits color
@param color: int 16-bits color
'''
color &= 0xffff
self.color888((color & 0xf800) >> 8, (color & 0x7e0) >> 3, (color & 0x1f) << 3)
class DFRobot_Expansion_Board_Servo():
def __init__(self, board):
'''
@param board: DFRobot_Expansion_Board Board instance to operate servo, test servo: https://www.dfrobot.com/product-255.html
Warning: servo must connect to pwm channel, otherwise may destory Pi IO
'''
self._board = board
def begin(self):
'''
@brief Board servo begin
'''
self._board.set_pwm_enable()
self._board.set_pwm_frequency(50)
self._board.set_pwm_duty(self._board.ALL, 0)
def move(self, id, angle):
'''
@brief Servos move
@param id: list One or more servos to set, items in range 1 to 4, or chan = self.ALL
@param angle: int Angle to move, in range 0 to 180
'''
if 0 <= angle <= 180:
self._board.set_pwm_duty(id, (0.5 + (float(angle) / 90.0)) / 20 * 100)
import smbus
class DFRobot_Expansion_Board_IIC(DFRobot_Expansion_Board):
def __init__(self, bus_id, addr):
'''
@param bus_id: int Which bus to operate
@oaram addr: int Board controler address
'''
self._bus = smbus.SMBus(bus_id)
DFRobot_Expansion_Board.__init__(self, addr)
def _write_bytes(self, reg, buf):
self.last_operate_status = self.STA_ERR_DEVICE_NOT_DETECTED
try:
self._bus.write_i2c_block_data(self._addr, reg, buf)
self.last_operate_status = self.STA_OK
except:
pass
def _read_bytes(self, reg, len):
self.last_operate_status = self.STA_ERR_DEVICE_NOT_DETECTED
try:
rslt = self._bus.read_i2c_block_data(self._addr, reg, len)
self.last_operate_status = self.STA_OK
return rslt
except:
return [0] * len
复制代码
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(4,GPIO.OUT)
GPIO.setup(5,GPIO.OUT)
GPIO.setup(6,GPIO.OUT)
GPIO.setup(7,GPIO.OUT)
GPIO.setup(8,GPIO.OUT)
GPIO.setup(9,GPIO.OUT)
GPIO.setup(10,GPIO.OUT)
GPIO.setup(11,GPIO.OUT)
from BOARD import DFRobot_Expansion_Board_IIC as Board
board = Board(1, 0x10) # Select i2c bus 1, set address to 0x10
def board_detect():
l = board.detecte()
print("Board list conform:")
print(l)
''' print last operate status, users can use this variable to determine the result of a function call. '''
def print_board_status():
if board.last_operate_status == board.STA_OK:
print("board status: everything ok")
elif board.last_operate_status == board.STA_ERR:
print("board status: unexpected error")
elif board.last_operate_status == board.STA_ERR_DEVICE_NOT_DETECTED:
print("board status: device not detected")
elif board.last_operate_status == board.STA_ERR_PARAMETER:
print("board status: parameter error")
elif board.last_operate_status == board.STA_ERR_SOFT_VERSION:
print("board status: unsupport board framware version")
if __name__ == "__main__":
board_detect() # If you forget address you had set, use this to detected them, must have class instance
# Set board controler address, use it carefully, reboot module to make it effective
while board.begin() != board.STA_OK: # Board begin and check board status
print_board_status()
print("board begin faild")
time.sleep(2)
print("board begin success")
board.set_pwm_enable() # Pwm channel need external power
# board.set_pwm_disable()
board.set_pwm_frequency(1000) # Set frequency to 1000HZ, Attention: PWM voltage depends on independent power supply
print("set part pwm channels duty to 60%")
board.set_pwm_duty(3, 60) # Set pwm0 channels duty
#board.set_pwm_duty(1, 70) # Set pwm1 channels duty
#board.set_pwm_duty(2, 80) # Set pwm2 channels duty
#board.set_pwm_duty(3, 90) # Set pwm3 channels duty
GPIO.output(8,GPIO.HIGH)#left 1()
GPIO.output(9,GPIO.LOW)
GPIO.output(6,GPIO.HIGH)#left 2(1)
GPIO.output(7,GPIO.LOW)
GPIO.output(10,GPIO.HIGH)#right 1(2)
GPIO.output(11,GPIO.LOW)
GPIO.output(4,GPIO.HIGH)#right 2(0)
GPIO.output(5,GPIO.LOW)
time.sleep(1)
GPIO.cleanup()
复制代码 【控制麦克纳姆轮】 麦克纳姆轮与普通轮子的区别在于麦克纳姆轮旋转时,由于存在斜向的从动轮,会同时产生一个斜向的力,当我们控制轮子旋转的速度与方向时,将斜向的力增强或抵消,从而实现小车的全向移动。可以完成横移、斜方向移动等普通小车无法完成的高难度动作,轮子的转动方向与小车的运动方向关系如下图:
import RPi.GPIO as GPIO
class mygpio():
GPIO.setmode(GPIO.BCM)
GPIO.setup(4,GPIO.OUT)
GPIO.setup(5,GPIO.OUT)
GPIO.setup(6,GPIO.OUT)
GPIO.setup(7,GPIO.OUT)
GPIO.setup(8,GPIO.OUT)
GPIO.setup(9,GPIO.OUT)
GPIO.setup(10,GPIO.OUT)
GPIO.setup(11,GPIO.OUT)
def forward(self):
GPIO.output(8,GPIO.HIGH)#left 1
GPIO.output(9,GPIO.LOW)
GPIO.output(6,GPIO.HIGH)#left 2
GPIO.output(7,GPIO.LOW)
GPIO.output(10,GPIO.HIGH)#right 1
GPIO.output(11,GPIO.LOW)
GPIO.output(4,GPIO.HIGH)#right 2
GPIO.output(5,GPIO.LOW)
def back(self):
GPIO.output(8,GPIO.LOW)#left 1
GPIO.output(9,GPIO.HIGH)
GPIO.output(6,GPIO.LOW)#left 2
GPIO.output(7,GPIO.HIGH)
GPIO.output(10,GPIO.LOW)#right 1
GPIO.output(11,GPIO.HIGH)
GPIO.output(4,GPIO.LOW)#right 2
GPIO.output(5,GPIO.HIGH)
def left(self):
GPIO.output(8,GPIO.LOW)#left 1
GPIO.output(9,GPIO.HIGH)
GPIO.output(6,GPIO.HIGH)#left 2
GPIO.output(7,GPIO.LOW)
GPIO.output(10,GPIO.HIGH)#right 1
GPIO.output(11,GPIO.LOW)
GPIO.output(4,GPIO.LOW)#right 2
GPIO.output(5,GPIO.HIGH)
def right(self):
GPIO.output(8,GPIO.HIGH)#left 1
GPIO.output(9,GPIO.LOW)
GPIO.output(6,GPIO.LOW)#left 2
GPIO.output(7,GPIO.HIGH)
GPIO.output(10,GPIO.LOW)#right 1
GPIO.output(11,GPIO.HIGH)
GPIO.output(4,GPIO.HIGH)#right 2
GPIO.output(5,GPIO.LOW)
def l_rotate(self):
GPIO.output(8,GPIO.LOW)#left 1
GPIO.output(9,GPIO.HIGH)
GPIO.output(6,GPIO.LOW)#left 2
GPIO.output(7,GPIO.HIGH)
GPIO.output(10,GPIO.HIGH)#right 1
GPIO.output(11,GPIO.LOW)
GPIO.output(4,GPIO.HIGH)#right 2
GPIO.output(5,GPIO.LOW)
def r_rotate(self):
GPIO.output(8,GPIO.HIGH)#left 1
GPIO.output(9,GPIO.LOW)
GPIO.output(6,GPIO.HIGH)#left 2
GPIO.output(7,GPIO.LOW)
GPIO.output(10,GPIO.LOW)#right 1
GPIO.output(11,GPIO.HIGH)
GPIO.output(4,GPIO.LOW)#right 2
GPIO.output(5,GPIO.HIGH)
def stop(self):
GPIO.output(4,GPIO.LOW)
GPIO.output(5,GPIO.LOW)
GPIO.output(6,GPIO.LOW)
GPIO.output(7,GPIO.LOW)
GPIO.output(8,GPIO.LOW)
GPIO.output(9,GPIO.LOW)
GPIO.output(10,GPIO.LOW)
GPIO.output(11,GPIO.LOW)
#GPIO.cleanup()
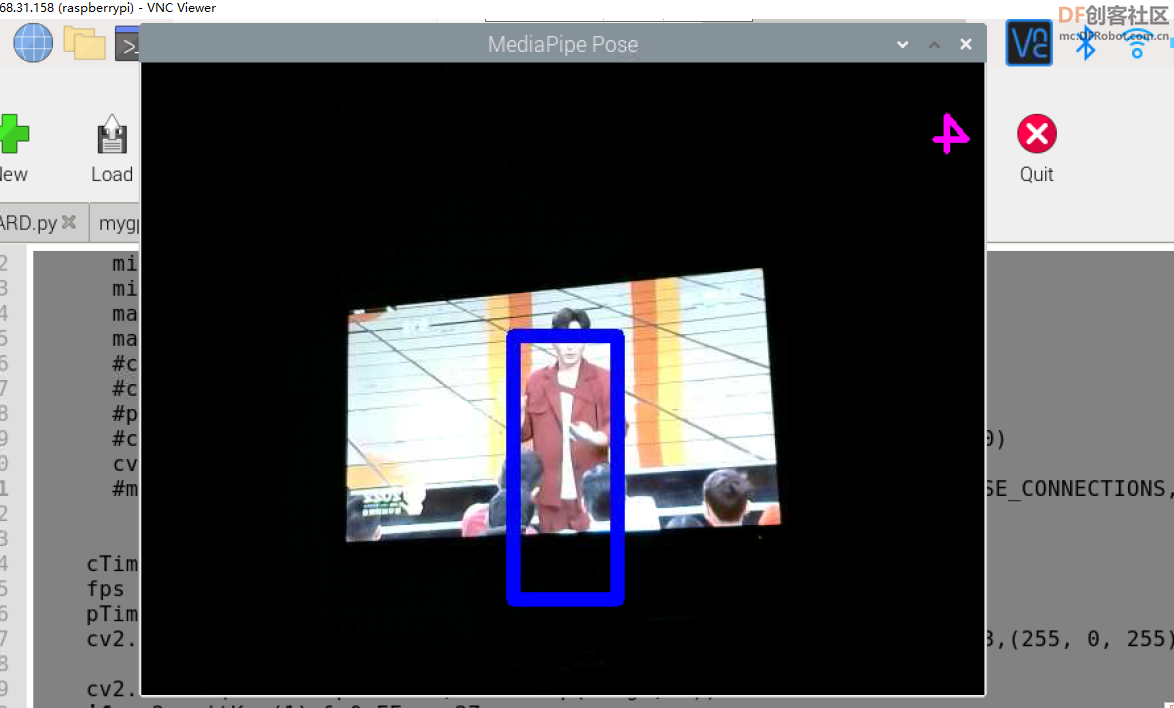
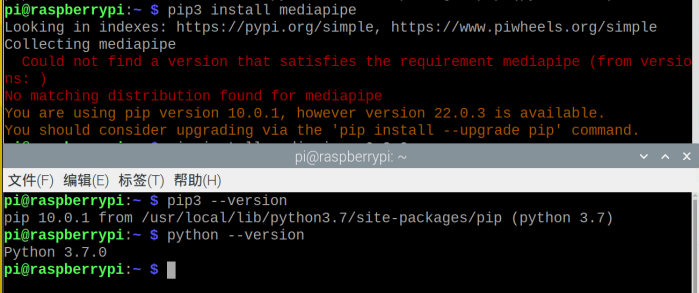
复制代码 【Mediapipe】 MediaPipe 是一款由 Google Research 开发并开源的多媒体机器学习模型应用框架。在谷歌,一系列重要产品,如 、Google Lens、ARCore、Google Home 以及 ,都已深度整合了 MediaPipe。 安装mediapipe库, 在终端中使用:pip3 install mediapipe-rpi4 人体姿态Mediapipe Pose,测试程序:
import cv2
import time
import mediapipe as mp
mp_drawing = mp.solutions.drawing_utils
mp_drawing_styles = mp.solutions.drawing_styles
mp_pose = mp.solutions.pose
pTime = 0
cTime = 0
# For webcam input:
cap = cv2.VideoCapture(0)
j=0
with mp_pose.Pose(min_detection_confidence=0.5,min_tracking_confidence=0.5) as pose:
while cap.isOpened():
success, image = cap.read()
if not success:
print("Ignoring empty camera frame.")
# If loading a video, use 'break' instead of 'continue'.
continue
j=j+1
if j<3:#丢帧
continue
else:
j=0
h,w,c=image.shape
image.flags.writeable = False
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
results = pose.process(image)
# Draw the pose annotation on the image.
if results.pose_landmarks:
list_x=[]
list_y=[]
image.flags.writeable = False
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
#print(results.pose_landmarks.landmark)
for i in results.pose_landmarks.landmark:
list_x.append(i.x)
list_y.append(i.y)
min_x=int(min(list_x)*w)
min_y=int(min(list_y)*h)
max_x=int(max(list_x)*w)
max_y=int(max(list_y)*h)
#cv2.circle(image,(min_x,min_y),10,(0,255,255),-1)
#cv2.circle(image,(max_x,max_y),5,(0,0,255),-1)
#print(min_x," ",min_y," ",max_x," ",max_y," ",w," ",h)
#cv2.rectangle(img,(min_x*2,min_y*2),(max_x*2,max_y*2),(255,0,0),10)
cv2.rectangle(image,(min_x,min_y),(max_x,max_y),(255,0,0),10)
#mp_drawing.draw_landmarks(image,results.pose_landmarks,mp_pose.POSE_CONNECTIONS,landmark_drawing_spec=mp_drawing_styles.get_default_pose_landmarks_style())
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(image, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3,(255, 0, 255), 3)
cv2.imshow('MediaPipe Pose', cv2.flip(image, 1))
if cv2.waitKey(1) & 0xFF == 27:
break
cap.release()
复制代码 【完整程序】
import sys
import os
import cv2
import time
import mediapipe as mp
import RPi.GPIO as GPIO
from mygpio import mygpio
sys.path.append(os.path.dirname(os.path.dirname(os.path.realpath(__file__))))
from BOARD import DFRobot_Expansion_Board_IIC as Board
board = Board(1, 0x10) # Select i2c bus 1, set address to 0x10
def board_detect():
l = board.detecte()
board_detect()
while board.begin() != board.STA_OK: # Board begin and check board status
print("board begin faild")
time.sleep(2)
print("board begin success")
board.set_pwm_enable() # Pwm channel need external power
# board.set_pwm_disable()
board.set_pwm_frequency(1000)
board.set_pwm_duty(0, 60)
board.set_pwm_duty(1, 60)
board.set_pwm_duty(2, 60)
board.set_pwm_duty(3, 60)
g=mygpio()
mp_drawing = mp.solutions.drawing_utils
mp_drawing_styles = mp.solutions.drawing_styles
mp_pose = mp.solutions.pose
pTime = 0
cTime = 0
# For webcam input:
cap = cv2.VideoCapture(0)
j=0
with mp_pose.Pose(min_detection_confidence=0.5,min_tracking_confidence=0.5) as pose:
while cap.isOpened():
success, image = cap.read()
if not success:
print("Ignoring empty camera frame.")
# If loading a video, use 'break' instead of 'continue'.
continue
j=j+1
if j<3:
continue
else:
j=0
h,w,c=image.shape
image.flags.writeable = False
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
results = pose.process(image)
# Draw the pose annotation on the image.
if results.pose_landmarks:
list_x=[]
list_y=[]
image.flags.writeable = False
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
#print(results.pose_landmarks.landmark)
for i in results.pose_landmarks.landmark:
list_x.append(i.x)
list_y.append(i.y)
min_x=int(min(list_x)*w)
min_y=int(min(list_y)*h)
max_x=int(max(list_x)*w)
max_y=int(max(list_y)*h)
#cv2.circle(image,(min_x,min_y),10,(0,255,255),-1)
#cv2.circle(image,(max_x,max_y),5,(0,0,255),-1)
#print(min_x," ",min_y," ",max_x," ",max_y," ",w," ",h)
#cv2.rectangle(img,(min_x*2,min_y*2),(max_x*2,max_y*2),(255,0,0),10)
cv2.rectangle(image,(min_x,min_y),(max_x,max_y),(255,0,0),10)
#mp_drawing.draw_landmarks(image,results.pose_landmarks,mp_pose.POSE_CONNECTIONS,landmark_drawing_spec=mp_drawing_styles.get_default_pose_landmarks_style())
mid=(min_x+max_x)/2
dis_x=mid-w/2
dis_w=max_x-min_x
print(dis_x," ",dis_w)
if dis_x>90:
print("right")
board.set_pwm_duty(0, 70)
board.set_pwm_duty(1, 70)
board.set_pwm_duty(2, 70)
board.set_pwm_duty(3, 70)
g.right()
elif dis_x<-90:
print("left")
board.set_pwm_duty(0, 70)
board.set_pwm_duty(1, 70)
board.set_pwm_duty(2, 70)
board.set_pwm_duty(3, 70)
g.left()
elif dis_w>350:
print("back")
board.set_pwm_duty(0, 60)
board.set_pwm_duty(1, 60)
board.set_pwm_duty(2, 60)
board.set_pwm_duty(3, 60)
g.back()
elif dis_w<200:
print("forward")
board.set_pwm_duty(0, 63)
board.set_pwm_duty(1, 60)
board.set_pwm_duty(2, 63)
board.set_pwm_duty(3, 60)
g.forward()
else:
print("stop1")
g.stop()
else:
print("stop2")
g.stop()
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(image, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3,(255, 0, 255), 3)
cv2.imshow('MediaPipe Pose', cv2.flip(image, 1))
if cv2.waitKey(1) & 0xFF == 27:
break
cap.release()
GPIO.cleanup()
复制代码







 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






