本帖最后由 云天 于 2022-9-17 22:26 编辑
【项目背景】
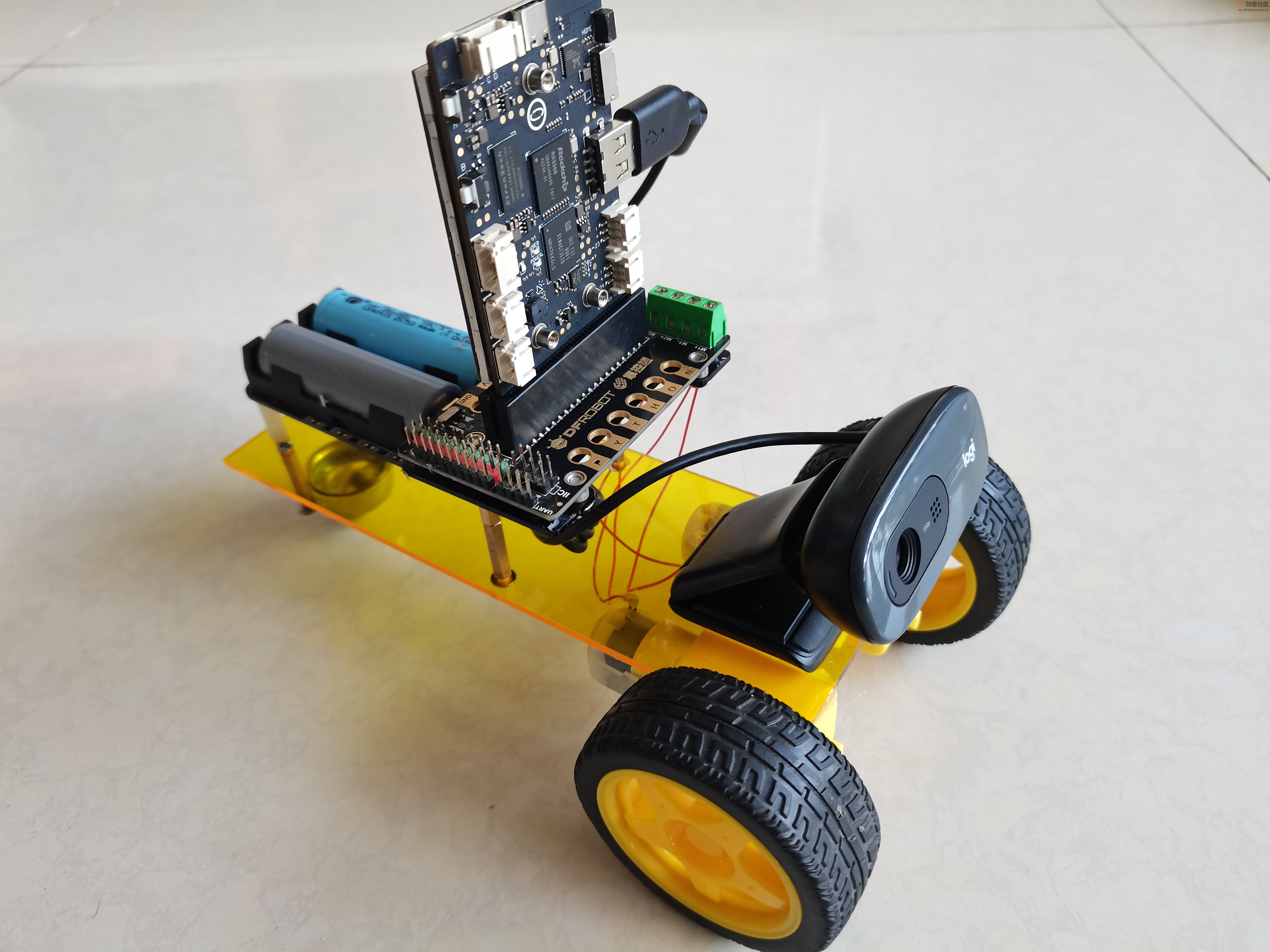
使用行空板替换micro:bit来控制麦昆。能控制麦昆Plus后,就可以用行空板完成更多的任务,如AI麦昆等。
【制作库文件】
制作库文件dfrobot_motor.py,并将此库文件放入行空板与程序在同一目录。
-
- import time
- from pinpong.board import gboard,I2C,Pin
- import math
- class MOTOR():
- M1 = 0
- M2 = 1
- ALL = 2
- CW = 1
- CCW = 2
- RED = 1
- GREEN = 2
- YELLOW = 3
- BLUE = 4
- PINK = 5
- CYAN = 6
- WHITH = 7
- PUT = 8
- LEFT = 1
- RIGHT = 2
- RGBALL = 3
- def __init__(self, board = None, i2c_addr = 0x10, bus_num=0):
- if isinstance(board, int):
- i2c_addr = board
- board = gboard
- elif board is None:
- board = gboard
- self.i2c_addr = i2c_addr
- self._i2c = I2C(bus_num)
- def motor_init(self):
- buf=[0x00, 0, 0, 0, 0]
- self.i2cWriteBuf(0x10, buf)
-
- def motor_run(self, index, direction, speed):
- Speed = abs(speed)
- if Speed > 255:
- Speed = 255
-
-
- if index > 3 or index < 0:
- return
- if index == self.M2:
-
- buf = [0x00, direction, Speed]
- self.i2cWriteBuf(0x10, buf)
- elif index == self.M1:
- buf = [0x02,direction, Speed]
- self.i2cWriteBuf(0x10, buf)
- elif index == self.ALL:
- buf = [0x00, direction, Speed,direction, Speed]
- self.i2cWriteBuf(0x10, buf)
- def motor_stop(self, index):
- self.motor_run(index, 0, 0)
-
- def read_to_addr(self, lens):
- return self._i2c.readfrom(self.i2c_addr, lens)
-
- def i2cWriteBuf(self, addr, buf):
- self._i2c.writeto(addr, buf)
- def setRGB(self,Dir,color):
- if Dir==1:
- buf=[0,0]
- buf[0]=0x0B
- buf[1]=color
- self.i2cWriteBuf(0x10, buf)
- elif Dir==2:
- buf=[0,0]
- buf[0]=0x0C
- buf[1]=color
- self.i2cWriteBuf(0x10, buf)
- elif Dir==3:
- buf=[0,0,0]
- buf[0]=0x0B
- buf[1]=color
- buf[2]=color
- self.i2cWriteBuf(0x10, buf)
- def constrain(self,amt,low,high):
- return low if (amt)<(low) else (high if (amt)>(high) else (amt))
- def servoRun(self,index,angle):
- buf=[0,0]
- buf[1] = self.constrain(angle, 40, 120)
- if index == 1:
- buf[0] = 0x14;
- elif index == 2:
- buf[0] = 0x15;
- elif index == 3:
- buf[0] = 0x16;
- elif index == 4:
- buf[0] = 0x14;
- self.i2cWriteBuf(0x10, buf)
- buf[0] = 0x15;
- self.i2cWriteBuf(0x10, buf)
- buf[0] = 0x16;
- else:
- return
-
- self.i2cWriteBuf(0x10, buf)
-
-
【点灯程序】
-
- # -*- coding: utf-8 -*-
-
- import time
- from pinpong.board import Board
- from dfrobot_motor import MOTOR
-
- Board("microbit").begin()
- M = MOTOR()
- while True:
-
- M.setRGB(M.LEFT,M.RED)
- time.sleep(2)
- M.setRGB(M.RIGHT,M.RED)
- time.sleep(2)
- M.setRGB(M.LEFT,M.BLUE)
- time.sleep(2)
- M.setRGB(M.RIGHT,M.BLUE)
- time.sleep(2)
-
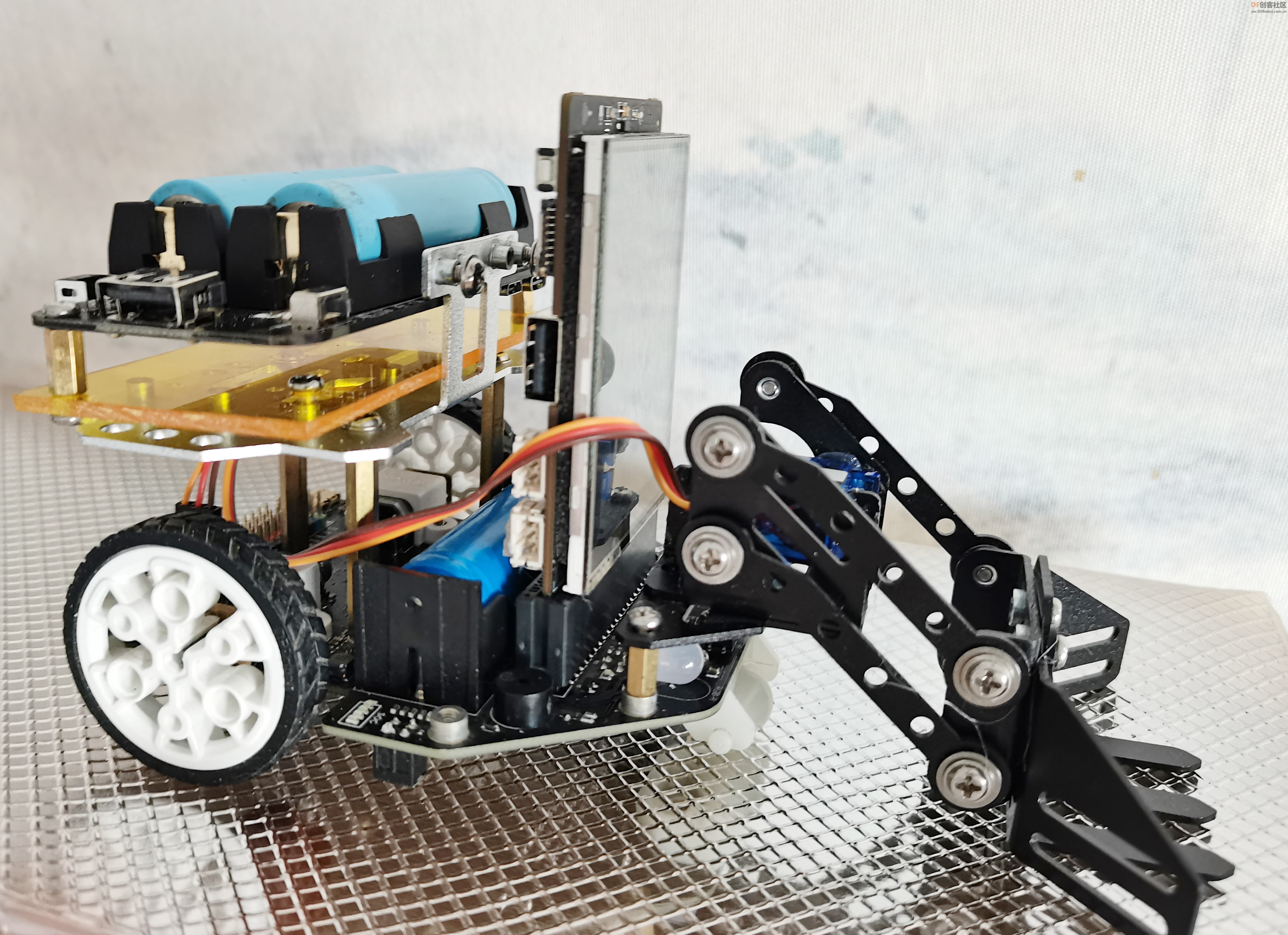
【控制舵机】
舵机接在麦昆Plus的S1舵机接口上,因我的舵机运动范围在40到120之间,所以在库中进行了限制:self.constrain(angle, 40, 120)
-
- # -*- coding: utf-8 -*-
-
- import time
- from pinpong.board import Board
- from dfrobot_motor import MOTOR
-
- Board("microbit").begin()
- M = MOTOR()
-
-
- while True:
-
- M.servoRun(1,40)
- time.sleep(2)
- M.servoRun(1,120)
- time.sleep(2)
【控制电机】
-
- # -*- coding: utf-8 -*-
-
- import time
- from pinpong.board import Board
- from dfrobot_motor import MOTOR
-
- Board("microbit").begin()
- M = MOTOR()
-
-
- while True:
-
-
- M.motor_run(M.LEFT,M.CW,200)
- time.sleep(2)
- M.motor_run(M.RIGHT,M.CW,200)
- time.sleep(2)
- M.motor_stop(M.ALL)
- time.sleep(2)
- M.motor_run(M.ALL,M.CCW,200)
- time.sleep(2)
- M.motor_stop(M.ALL)
- time.sleep(2)
-
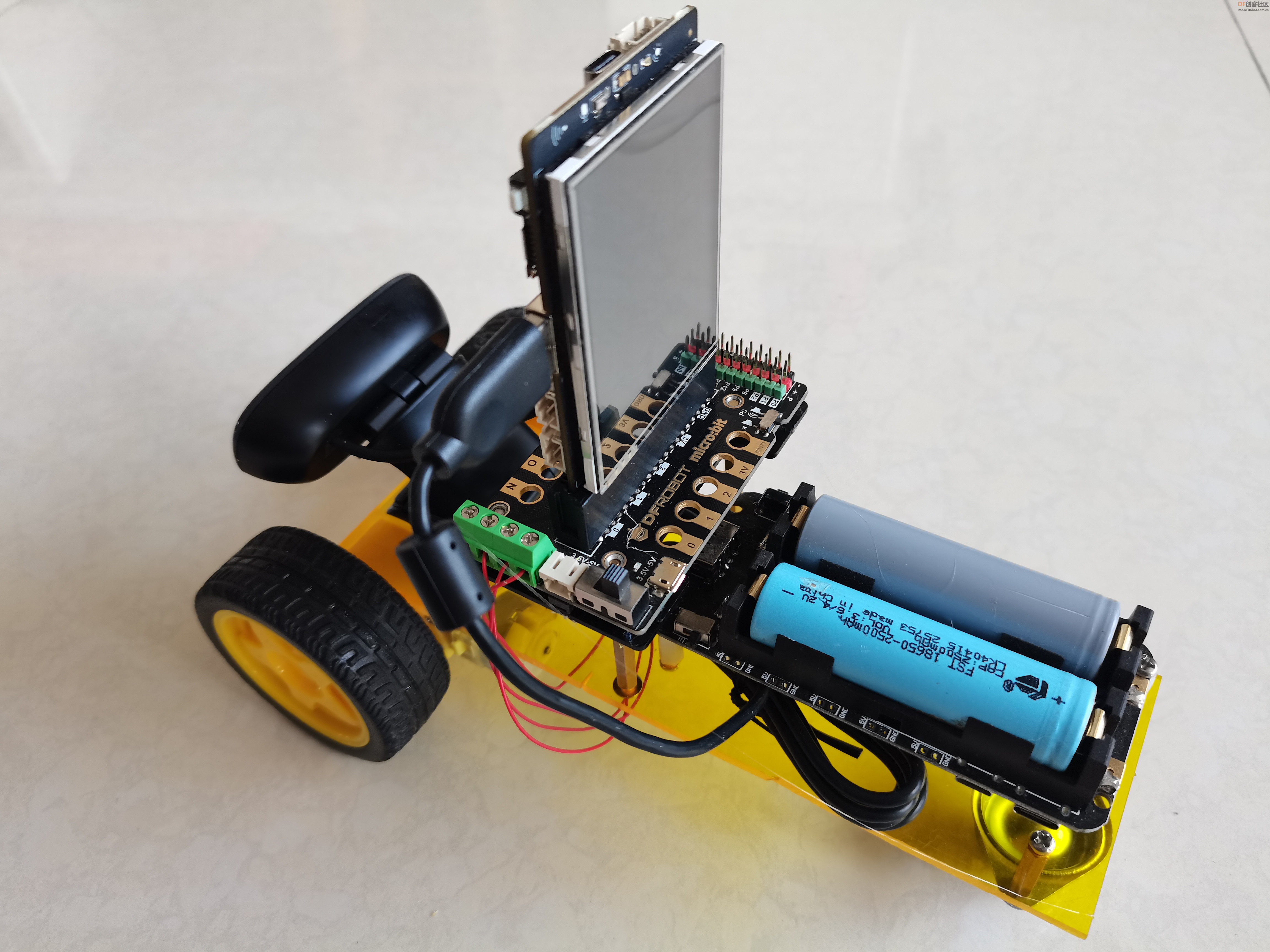
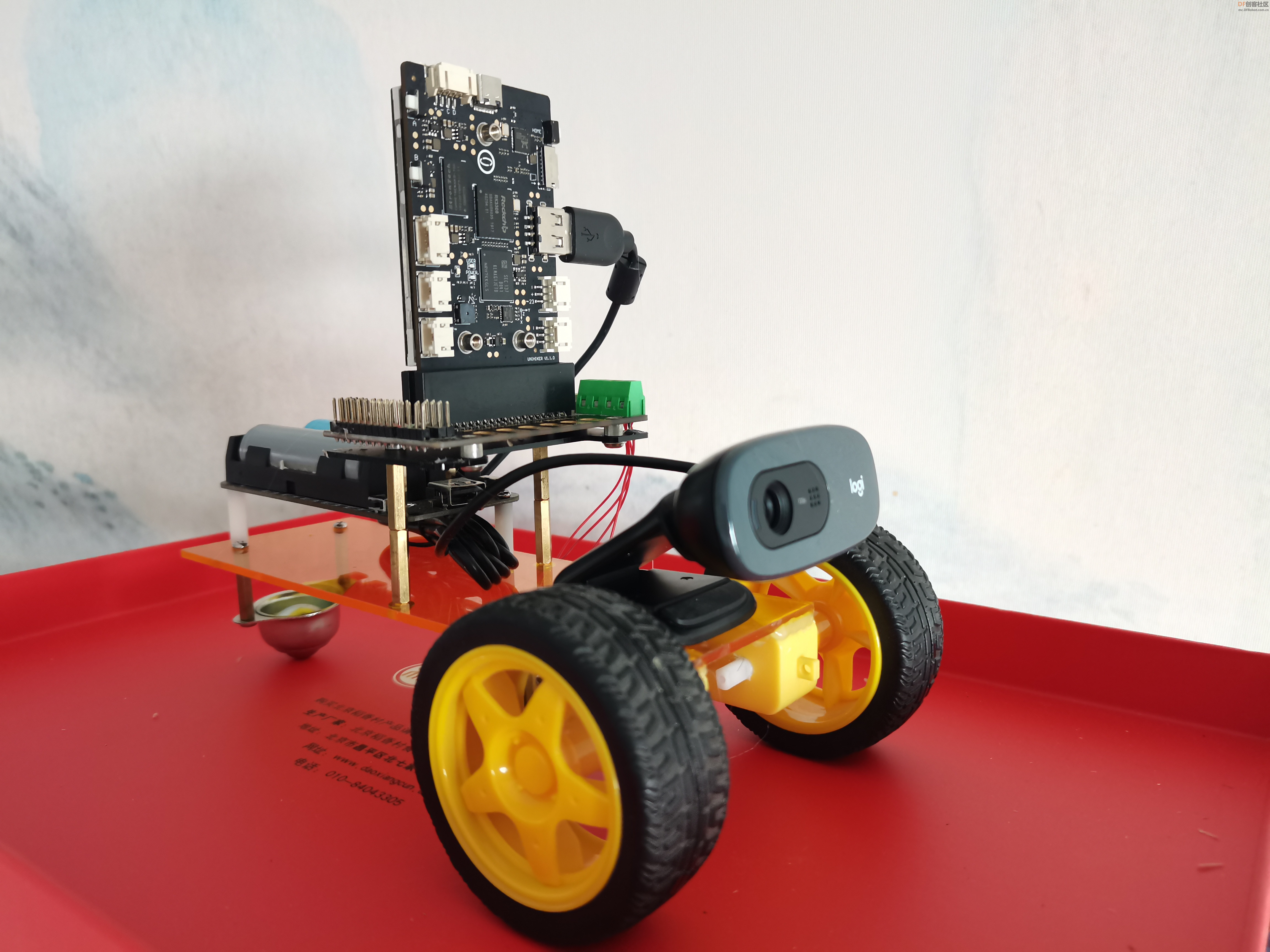
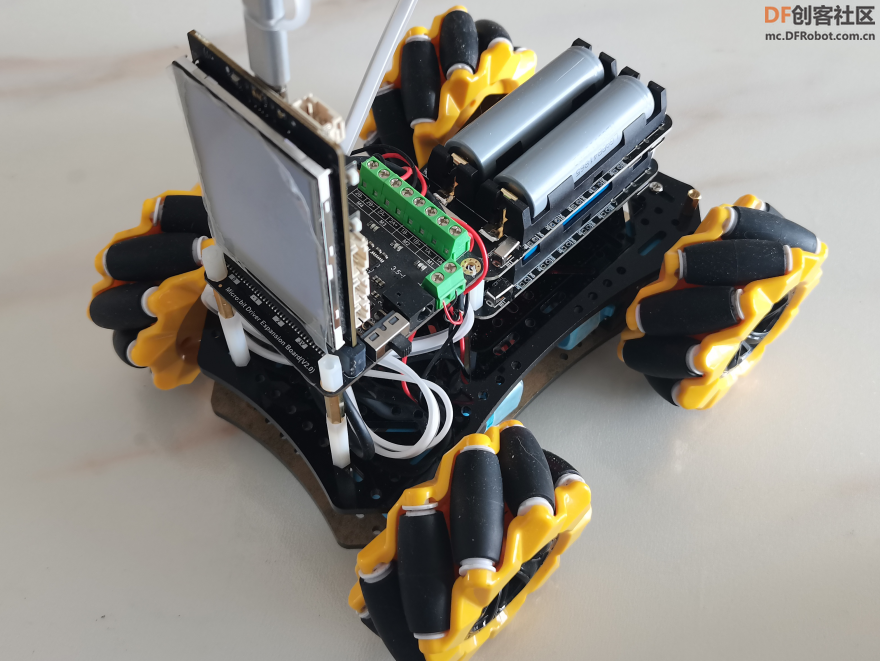
利用micro:bit掌控I/O扩展板制作小车,也可以使用上面的库。
【micro:bit 电机驱动扩展板】 micro:bit 电机驱动扩展板,因为使用了PCA9685来驱动电机,是一款用于产生16路PWM信号的控制芯片, 采用I2C总线与主控芯片进行通信。所以这个扩展板如果要接行空板控制电机,需使用Pinpong库中的microbit_motor.py库。 | 





 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






