|
5988| 7
|
[项目] 智能哑铃 |
|
本帖最后由 云天 于 2023-8-20 10:28 编辑 【项目背景】 闺女开学就要升入高中了,据说衡水中学的军训很累,还有远足活动。所以这几天每天早起陪闺女晨跑,孩儿她妈还给买了哑铃,哑铃是每个5KG,孩子觉得锻炼起来还可以,但她妈觉得有些重,不适合闺女。又买了更小的3KG,大的就给我了。我微微一笑,“造”起来。  【项目设计】 设计原则:不能太影响哑铃原有重量,不影响活动过程,不影响存放。 设计原理:使用哑铃锻炼过程中,哑铃上升下降,运动速度会有快慢变化即产生加速度变化,可由加速度传感器测得。 硬件选择:主板使用micro:bit,Micro:bit板载加速度传感器。 【设计亮点】  1.使用X轴、Y轴向量和的模来判断运动状态 2.使用指数移动平均(EMA)滤波算法 3.使用二进制点阵进行计数 【制作过程】  1、方案一,将Micro:bit固定在正面。  编写程序,获取三轴加速度值  在Excel中处理,并使用图表进行分析  可发现,运动过程中,Z轴加速度有明显变化。通过程序分析Z轴加速度值,可得运行状态。但同时,也发现,这样放置主控板,不利于存放(有可能放下时朝下压坏)。 2.方案二,将Micro:bit固定在侧面。  经数据分析发现,主控板如上图朝向运动时,Y轴加速度值变化明显。 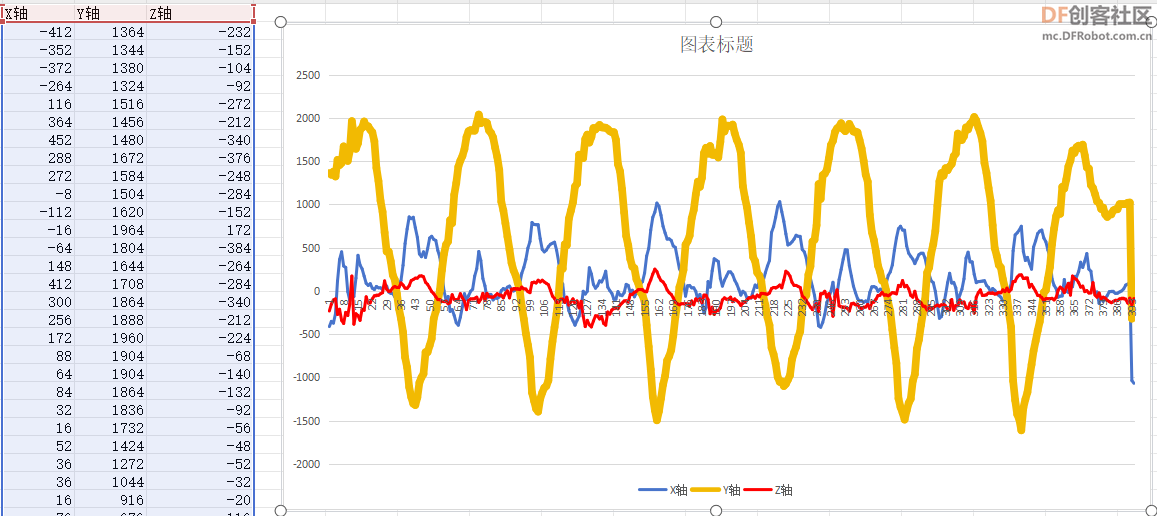 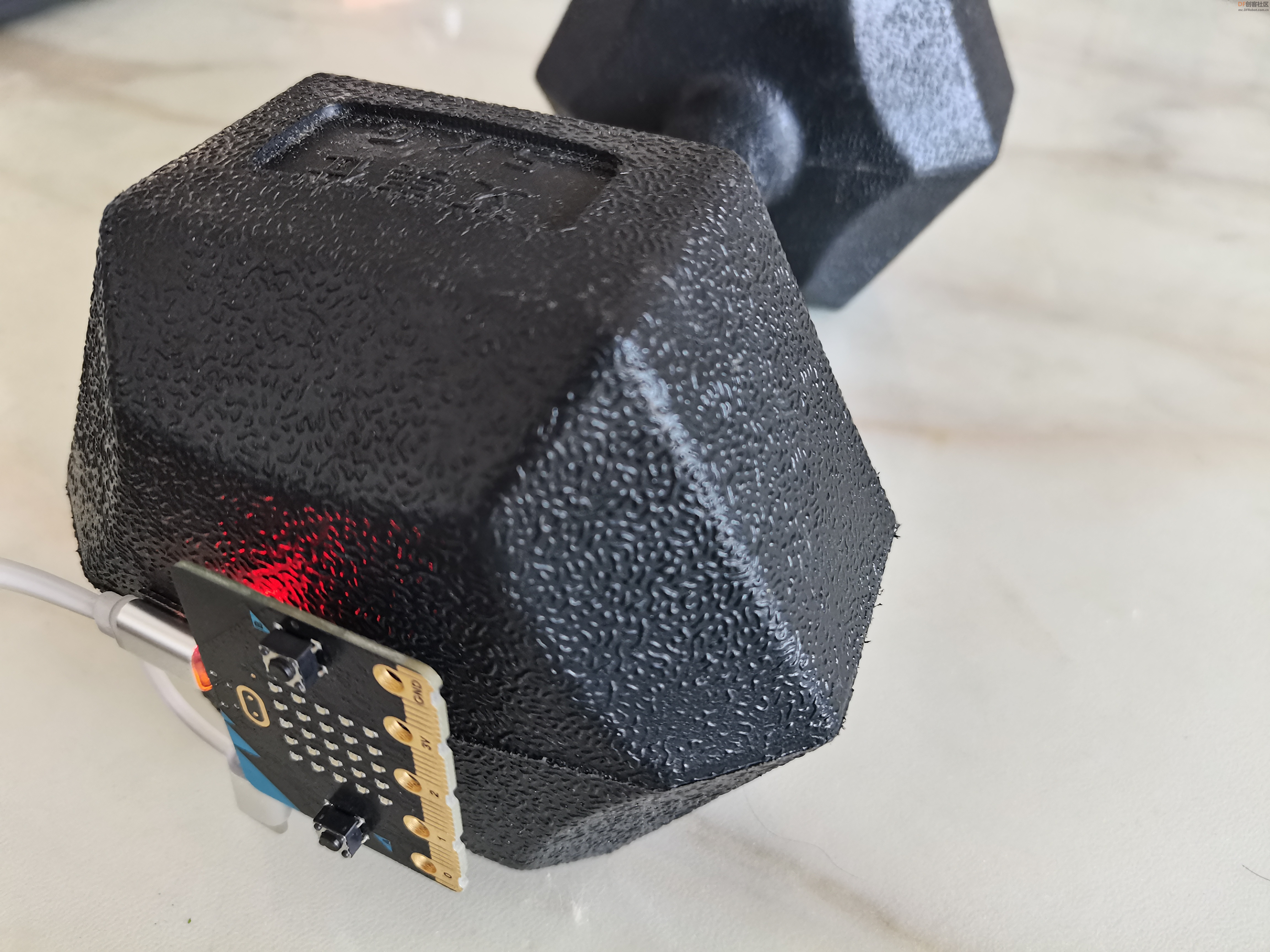 经数据分析发现,主控板如上图朝向运动时,X轴加速度值变化明显。 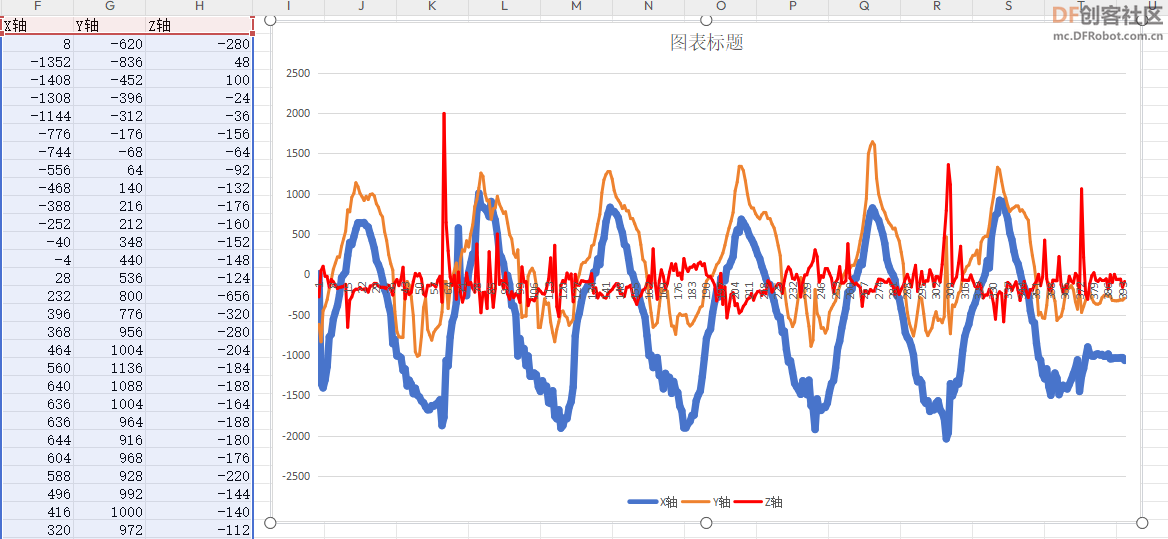 3.矢量和的模 当主控板安装在侧面时,运动时,只有Z轴加速度值变化不明显。当主控板在侧面朝向不同时,运动时,xy两轴的数据是不确定的,但是二者矢量和的模却是有规律的(其实真正的加速度被正交分解了)。    4.(EMA)滤波 记第i个时间单位获取到的加速度的二个矢量和的模大小为xi,为了使数据更加平滑,分别使用两次的指数滤波(EMA)。 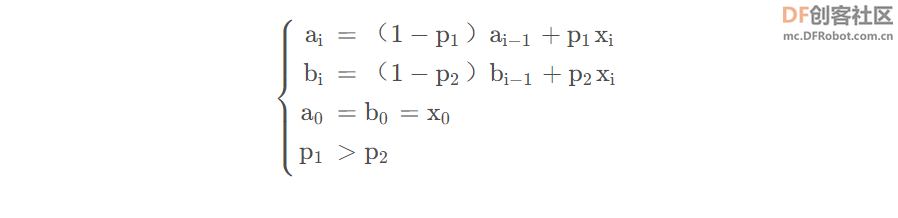 其中a i 是拟合曲线,b i均值,因此Δ h = a i − b i 即波峰波谷的高度差,得到Δ h后再跟设置好的阈值比较。 Δ h>highLimit 往高 Δ h<lowLimit 往低 p1=0.5 p2=0.002 highLimit=300 lowLimit=-300 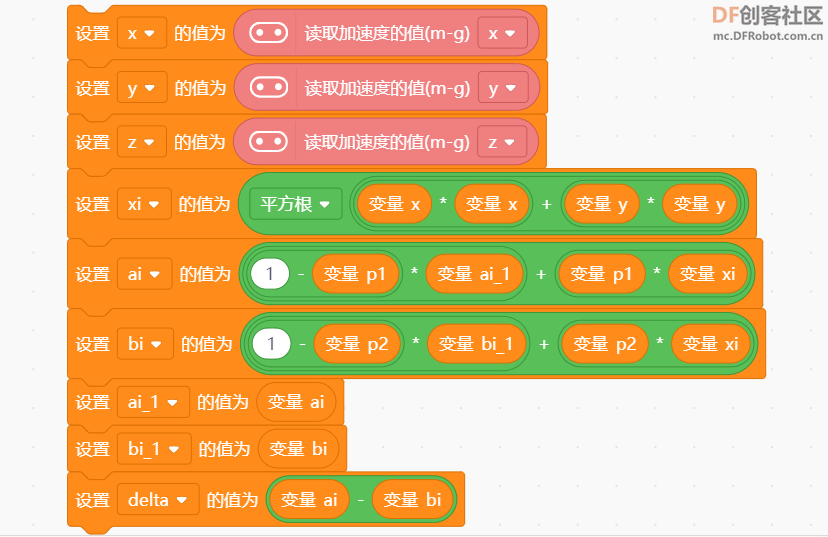 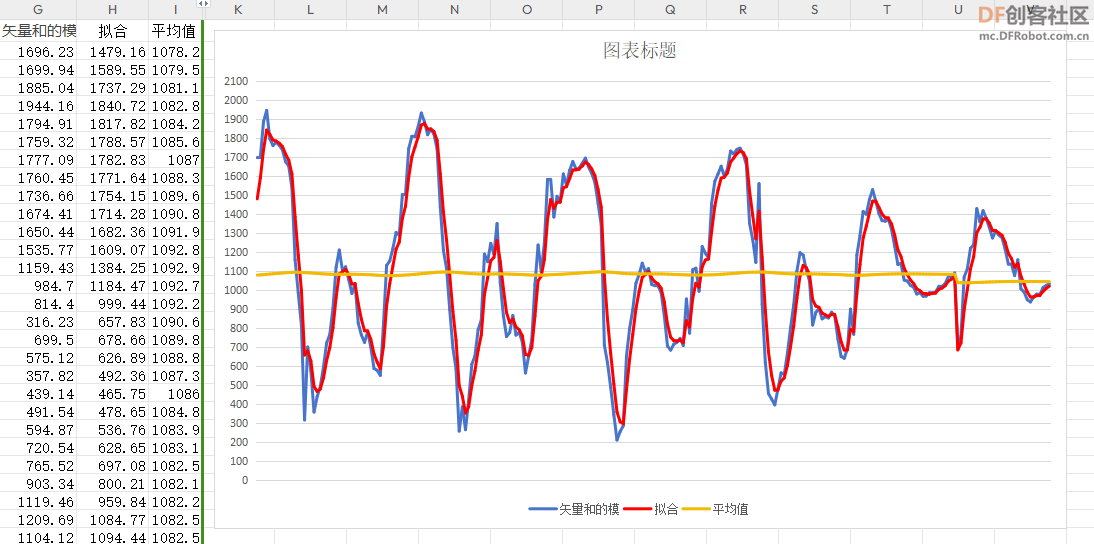 上图是带入这些参数得到的曲线,我们可以看到经过p1参数的滤波得到的曲线(红色),已经大致拟合原数据(蓝色),而经过p2 参数得到的曲线(绿色)大致为均值 5.记录个数  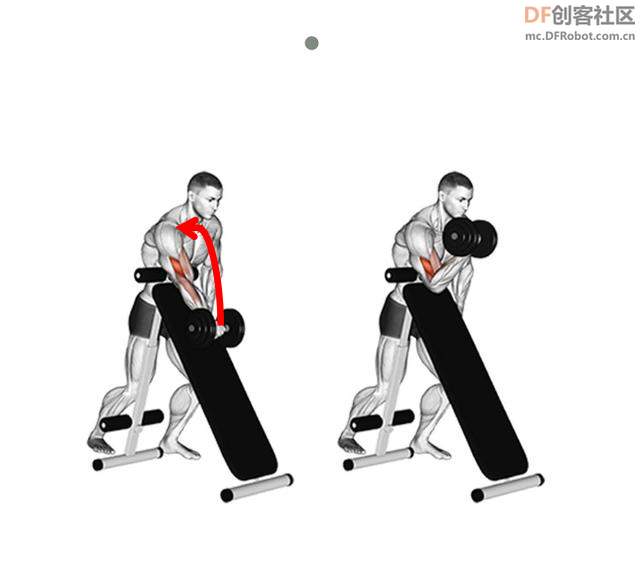 通过上图与实际运动情况对比分析,两个大波峰这间的小波峰是运动到最上时平行回拉的过程,此波峰可通过设定的阈值忽略掉。此时,只需要判断一个上升接一个下降,就可将计数器加1。具体程序如下:  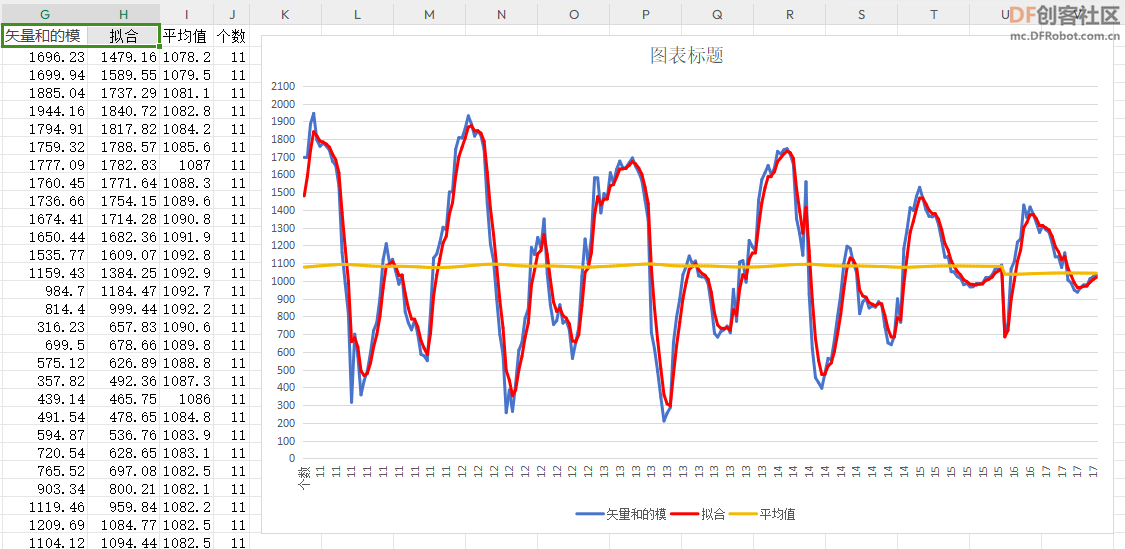 6.使用二进制点阵显示计数 使用Micro:bit点阵屏最中间一行,使用二进制方式亮灯显示计数。因只有五位,所以最大可显示计数31。如要显示更大的计数,可将其它点阵灯利用上。 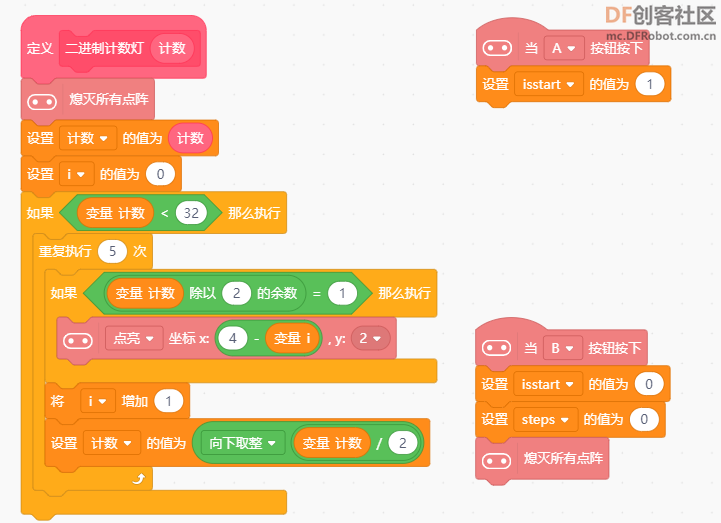 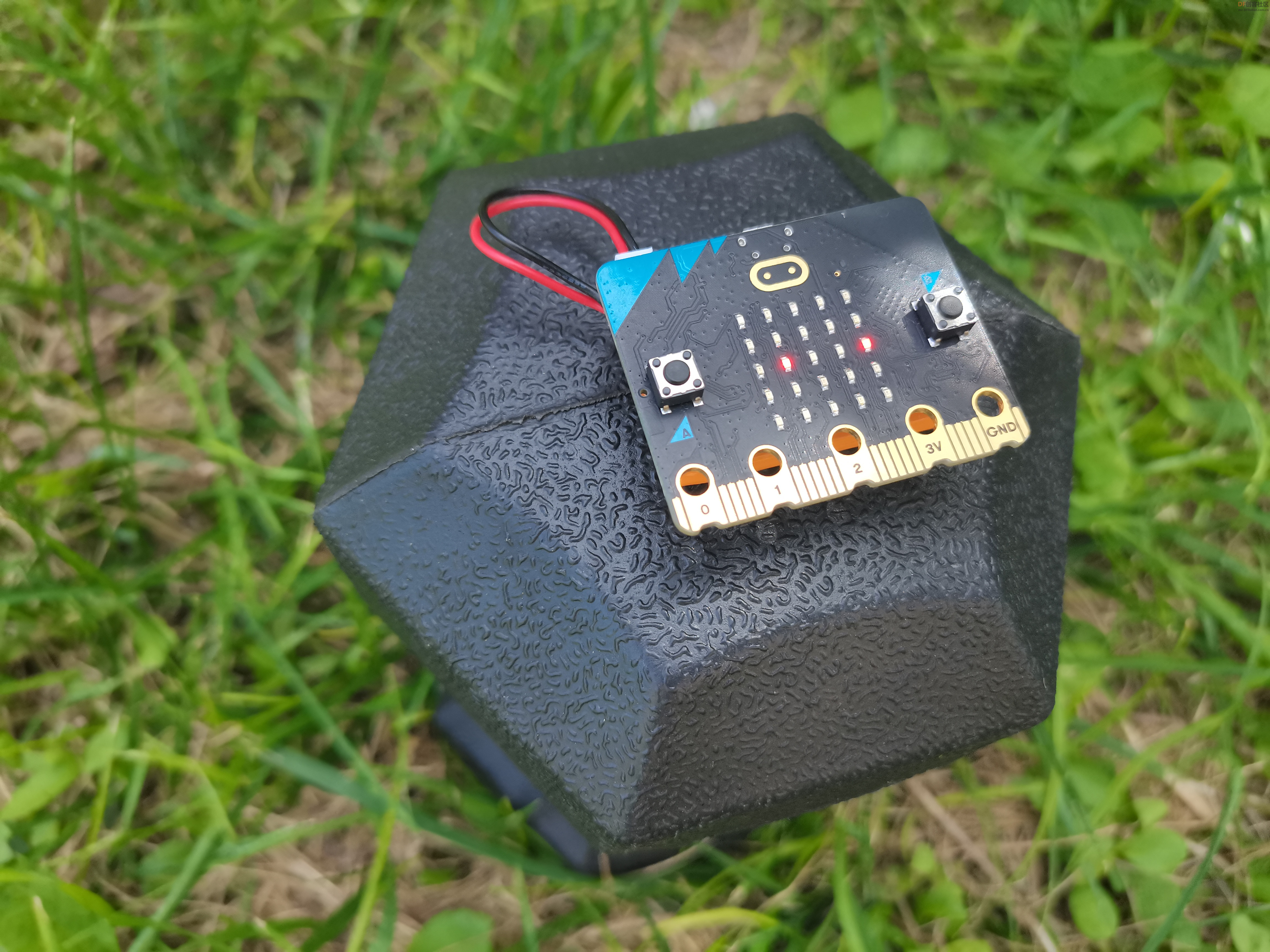 (显示计数9) 【演示视频】 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






