|
22122| 29
|
[项目] 【花雕学编程】Arduino动手做(226)---L298N驱动42步进电机 |
|
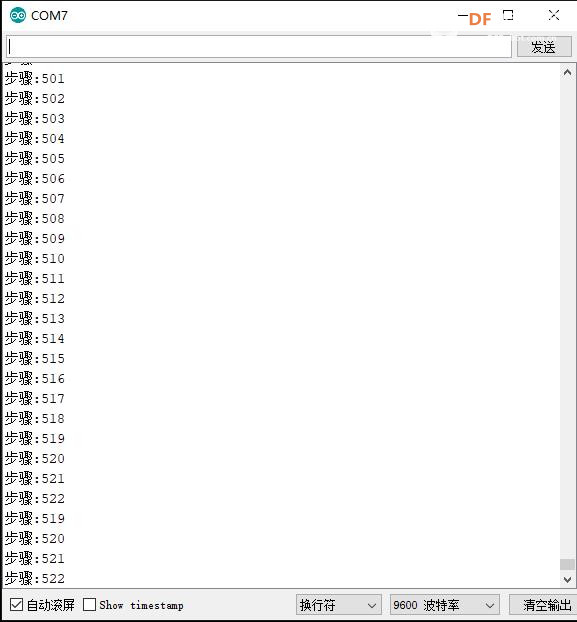
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机 项目实验之四:不使用库,直接改变电压值控制步进电机持续正转 实验开源代码 |
|
本帖最后由 驴友花雕 于 2024-8-26 16:47 编辑 代码说明: 1、该程序首先包括 Arduino Stepper 库。步进库与 Arduino IDE 打包在一起,负责对发送到电机的脉冲进行排序。 2、包含库后,我们定义一个名为 stepsPerRevolution 的变量。顾名思义,它是您的电机额定每转的步数。在我们的例子中是 300。 3、接下来,我们创建 Stepper 库的对象。Stepper 类的构造函数将电机和 Arduino 引脚连接的每转步数作为参数。 4、在代码的设置部分,我们通过调用 setSpeed() 函数来设置步进电机的速度,并初始化串行通信。 5、最后,在代码的循环部分,我们只需调用 step() 函数,该函数使电机以 setSpeed() 函数设置的速度转动特定数量的步数。将负数传递给此函数将反转电动机的旋转方向。 6、请注意,step() 是一个阻塞函数。这意味着它将等到电机完成移动后,将控制权传递给程序中的下一行。例如,如果您将速度设置为 1 RPM 并在 100 步电机上调用 step(100),则此功能将需要整整一分钟才能完成。 |
实验开源代码 |
|
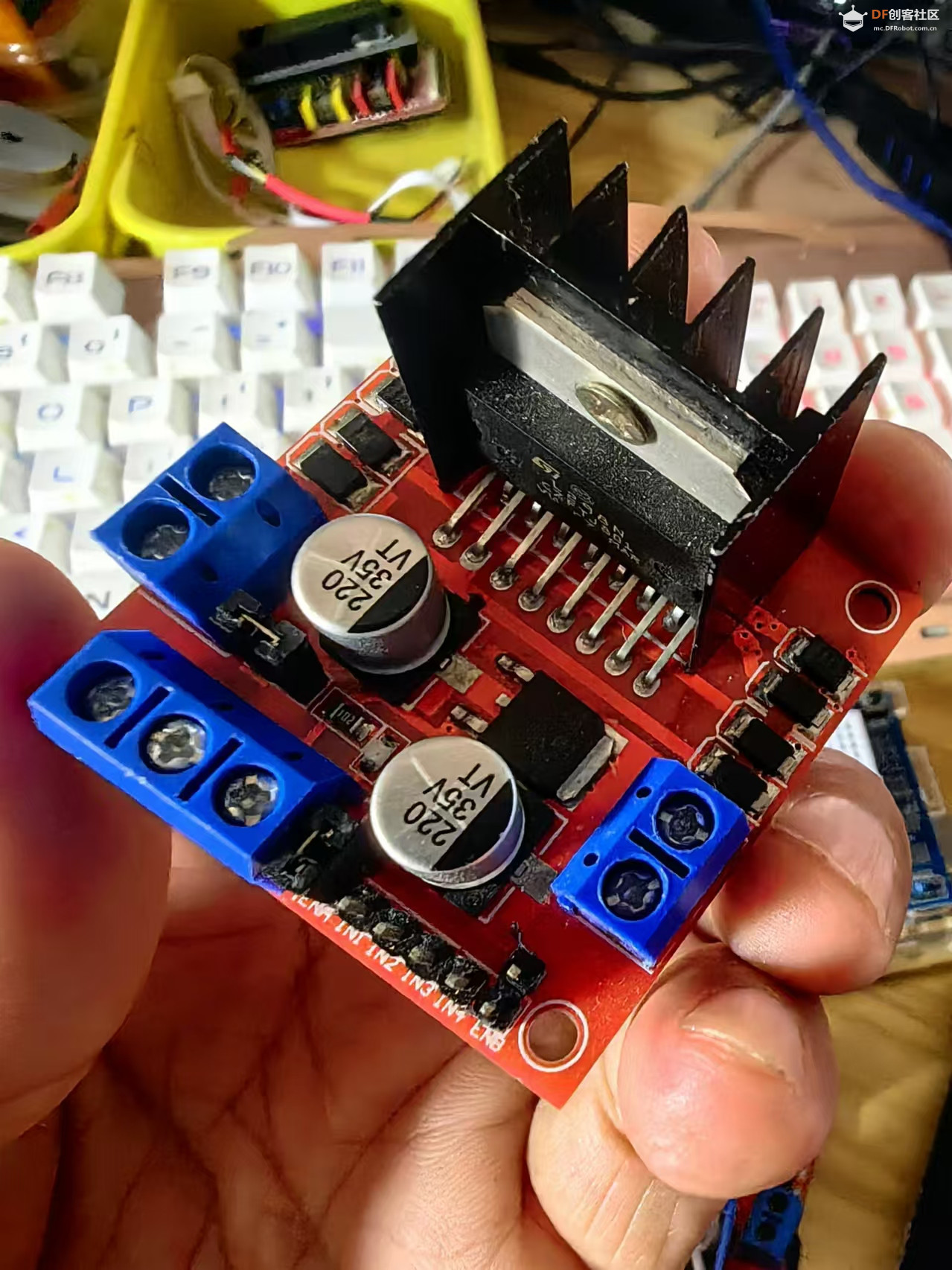
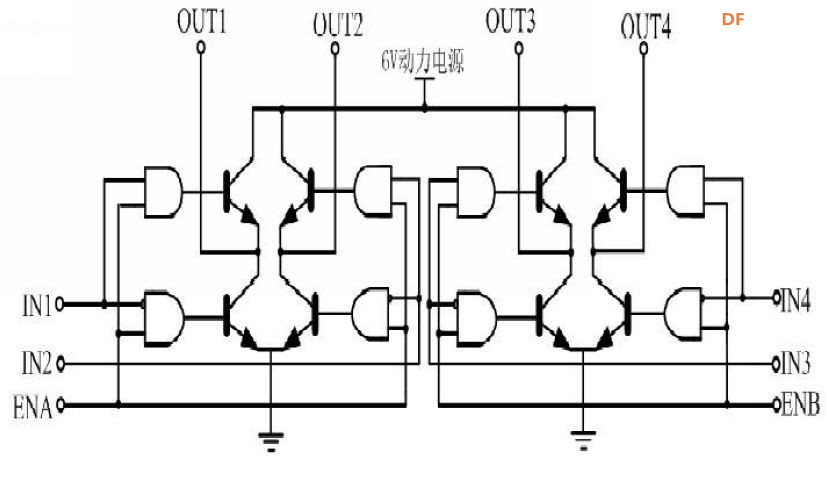
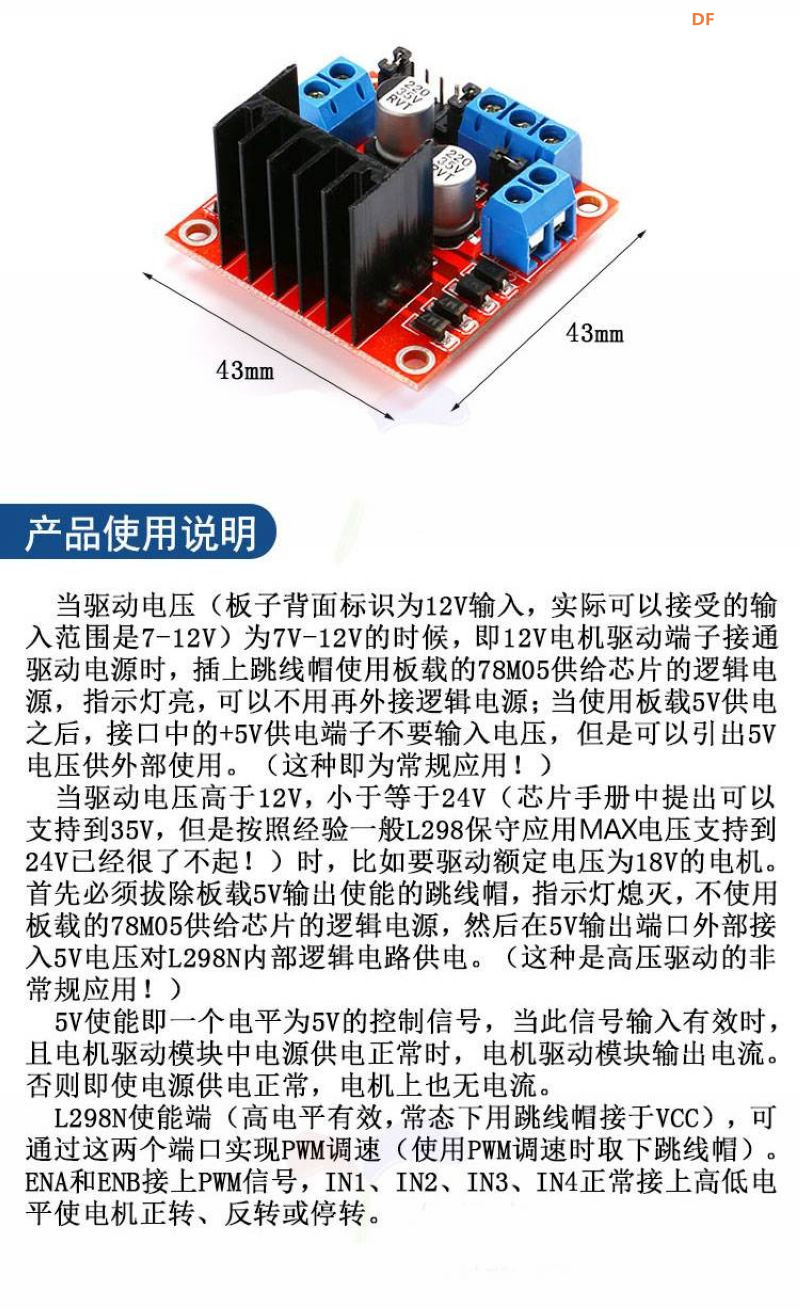
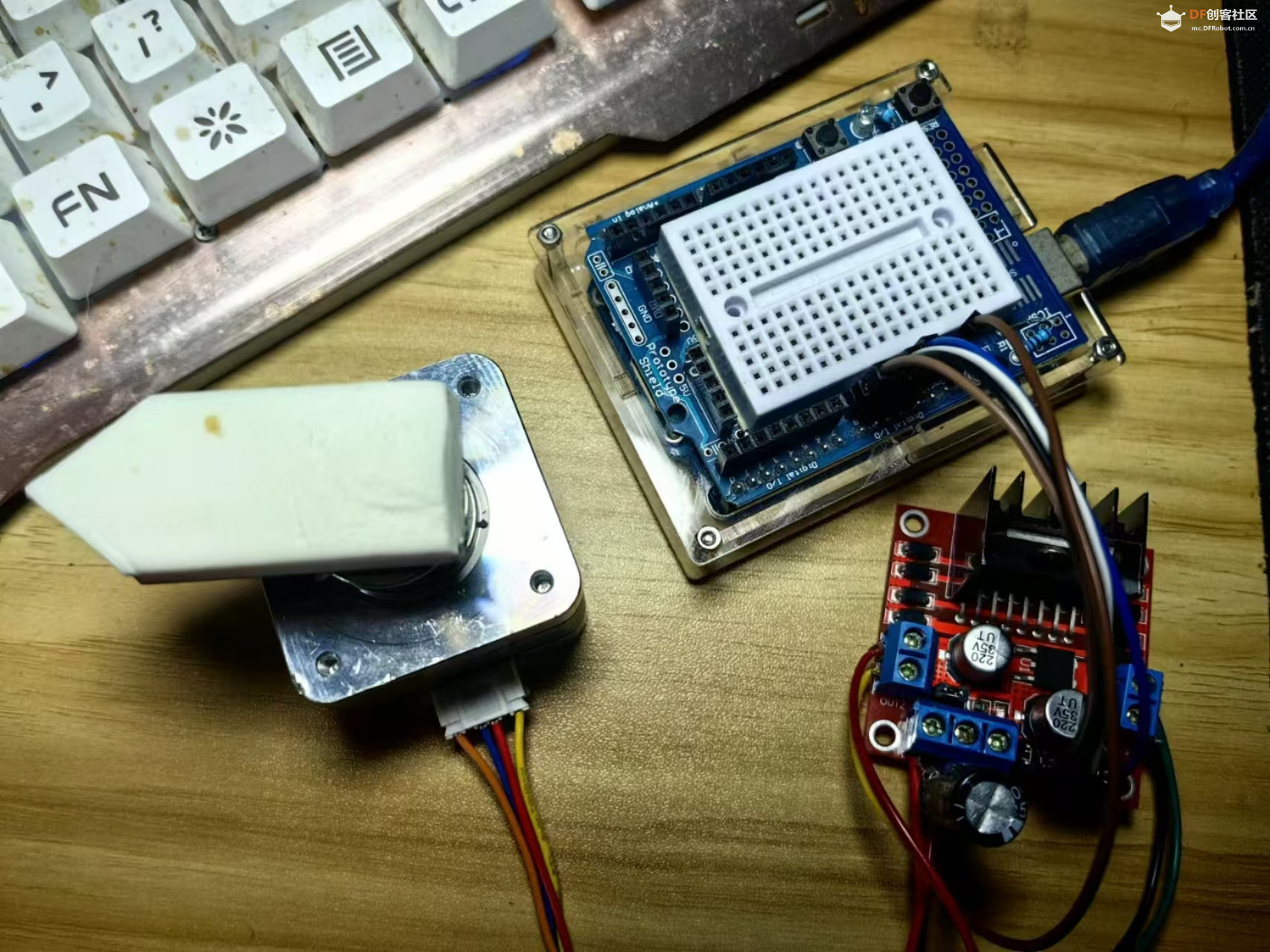
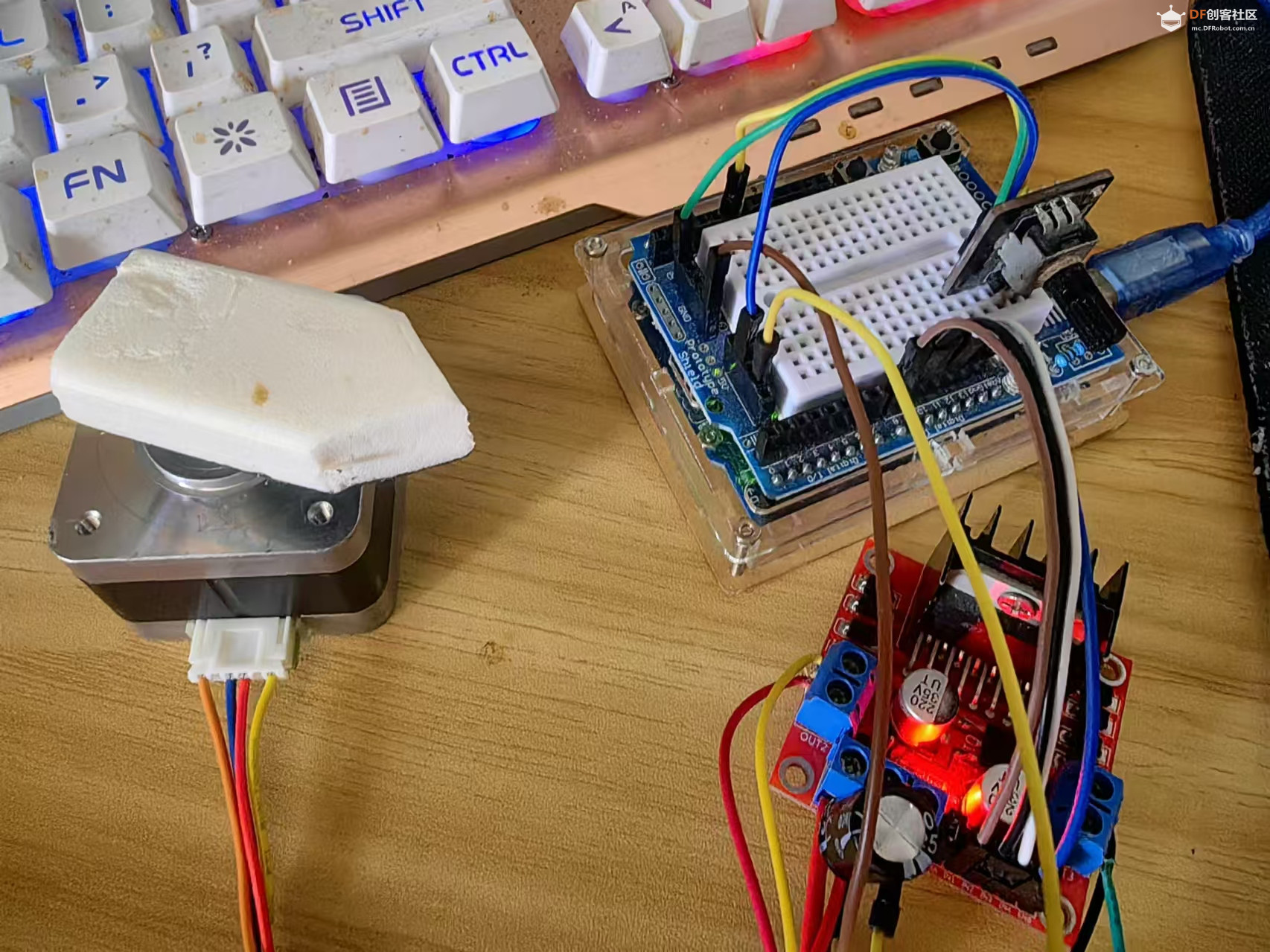
L298N 是专用驱动集成电路,属于H桥集成电路,与L293D的差别是其输出电流增大,功率增强。其输出电流为2A,最高电流4A,最高工作电压50V,可以驱动感性负载,如大功率直流电机,步进电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。当驱动直流电机时,可以直接控制步进电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。 L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。 L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7V电压。4脚VS接电源电压,VS电压范围VIH为+2.5~46V。输出电流可达2A,可驱动电感性负载。1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。5,7,10,12脚接输入控制电平,控制电机的正反转。EnA,EnB接控制使能端,控制电机的停转。   |
|
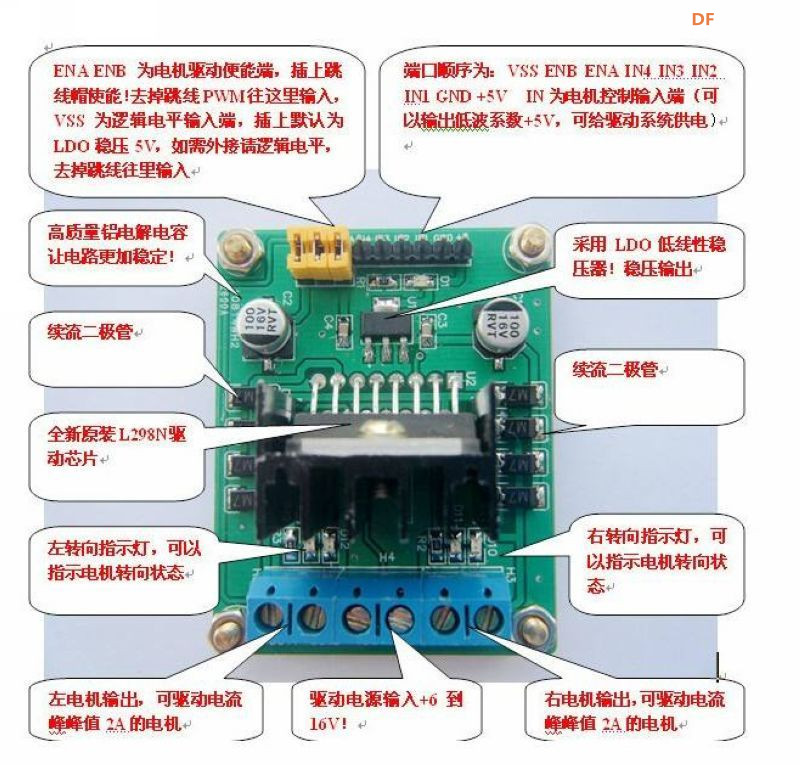
L298N电机驱动板模块的参数 1.驱动芯片:L298N双H桥直流电机驱动芯片 2.驱动部分端子供电范围Vs:+5V~+35V ; 如需要板内取电,则供电范围Vs:+7V~+35V 3.驱动部分峰值电流Io:2A 4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V) 5.逻辑部分工作电流范围:0~36mA 6.控制信号输入电压范围: 低电平:-0.3V≤Vin≤1.5V 高电平:2.3V≤Vin≤Vss 7.使能信号输入电压范围: 低电平:-0.3≤Vin≤1.5V(控制信号无效) 高电平:2.3V≤Vin≤Vss(控制信号有效) 8.最大功耗:20W(温度T=75℃时) 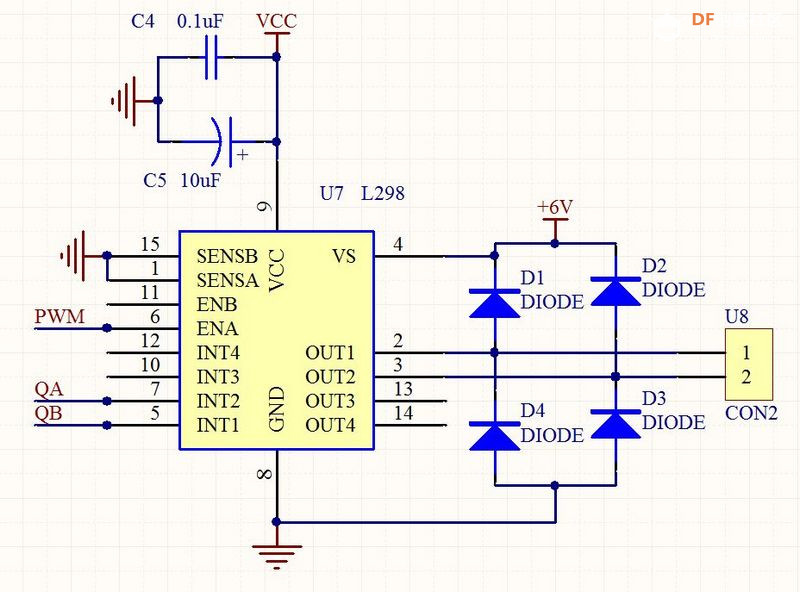 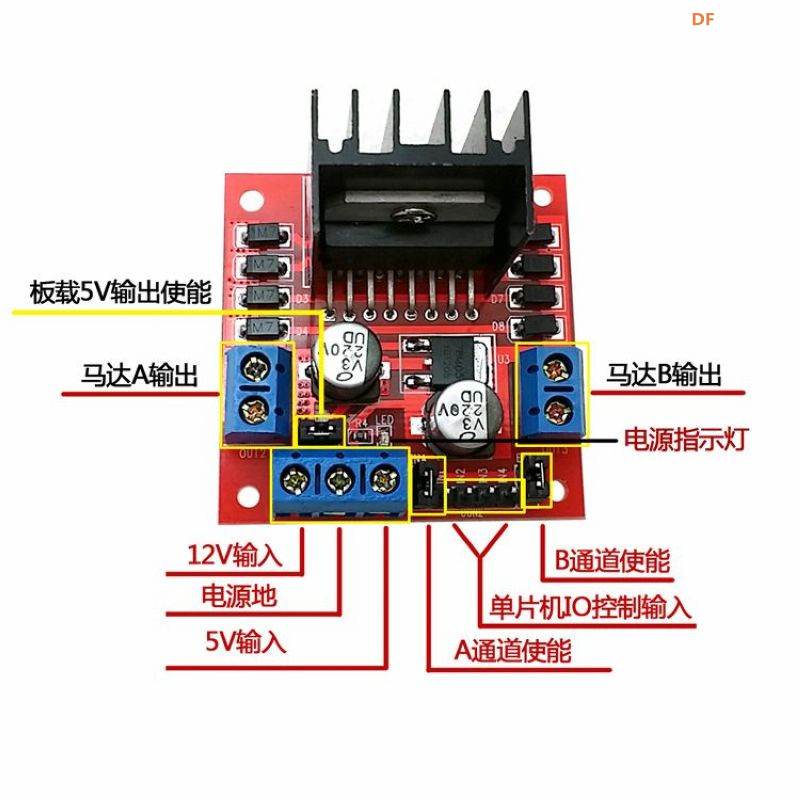 |
|
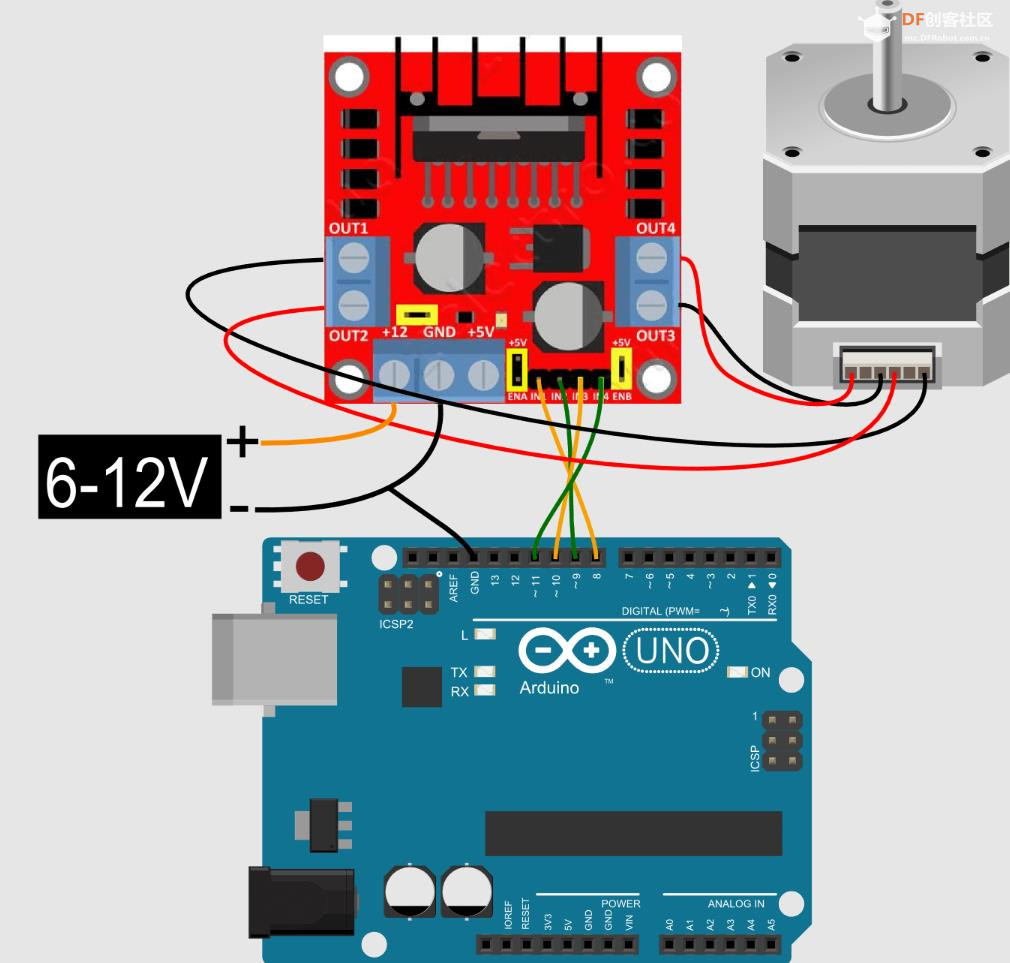
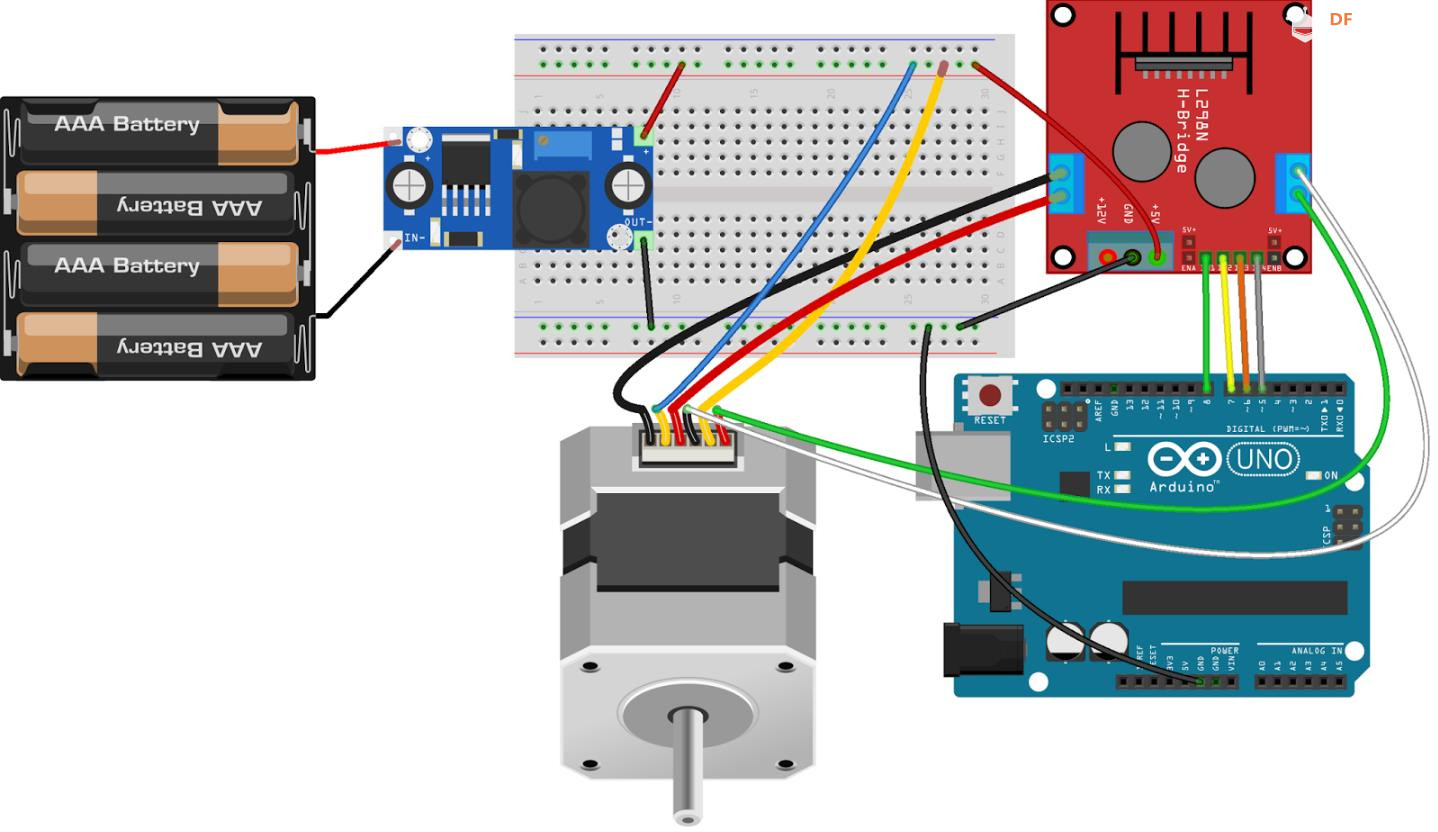
L298N电机驱动模块性能特点: 1:可实现电机正反转及调速。 2:启动性能好,启动转矩大。 3:工作电压可达到36V,4A。 4:可同时驱动两台直流电机。 5:适合应用于机器人设计及智能小车的设计。 情况一:用L298N驱动两台直流减速电机的电路。引脚A,B可用于PWM控制。如果机器人项目只要求直行前进,则可将IN1,IN2和IN3,IN4两对引脚分别接高电平和低电平,仅用单片机的两个端口给出PWM信号控制使能端A,B即可实现直行、转弯、加减速等动作。 情况二:用L298实现二相步进电机控制。将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。信号频率决定了电机的转速。改变绕组脉冲信号的顺序即可实现正反转。 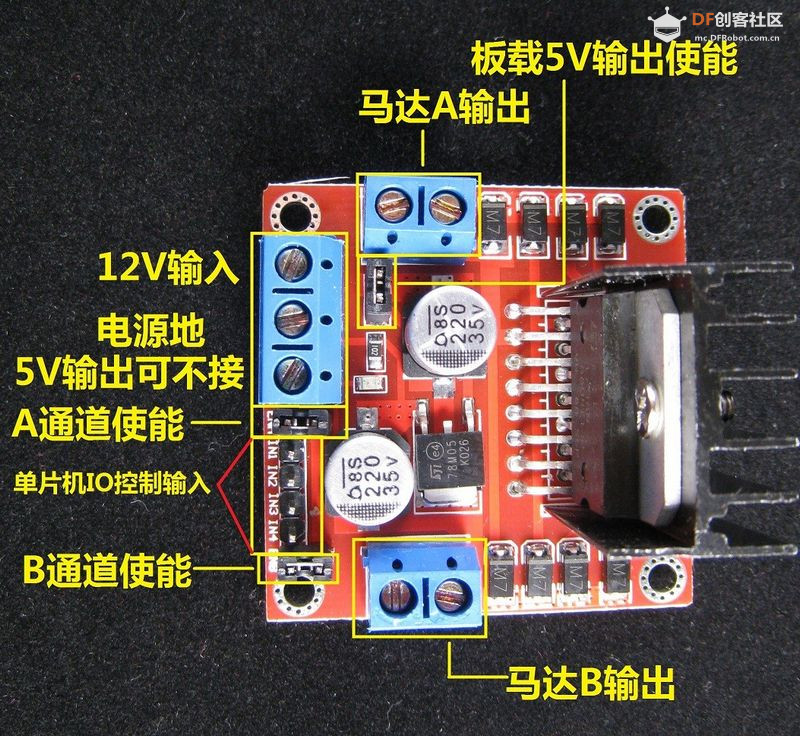 |
|
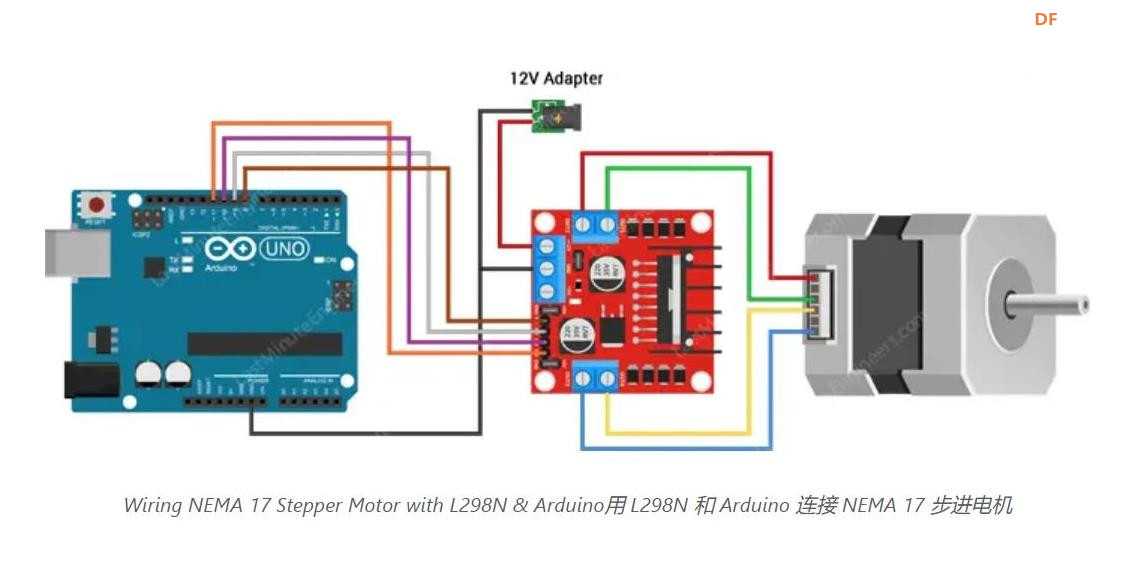
注意事项: 1.当你的驱动电压(上图标识为12V输入,实际可以接受的输入范围是7-12V)为7V-12V的时候,可以使能板载的5V逻辑供电,当使用板载5V供电之后,接口中的+5V供电不要输入电压,但是可以引出5V电压供外部使用。(这种即为常规应用!) 2.当驱动电压高于12V,小于等于24V(芯片手册中提出可以支持到35V,但是按照经验一般298保守应用最大电压支持到24V已经很了不起!)时,比如要驱动额定电压为18V的电机。首先必须拔除板载5V输出使能的跳线帽。然后在5V输出端口外部接入5V,5V使能即 一个电平为5V的控制信号,当此信号输入有效时,且电机驱动模块中电源供电正常时,电机驱动模块输出电流。否则即使电源供电正常,电机上也无电流。电压对L298N内部逻辑电路供电。(这种是高压驱动的非常规应用!) 3、L298N供电的5V如果是用另外电源供电的话,(即不是和单片机的电源共用),那么需要将单片机的GND和模块上的GND连接在一起,只有这样单片机上过来的逻辑信号才有个参考0点。此点非常重要,请注意。 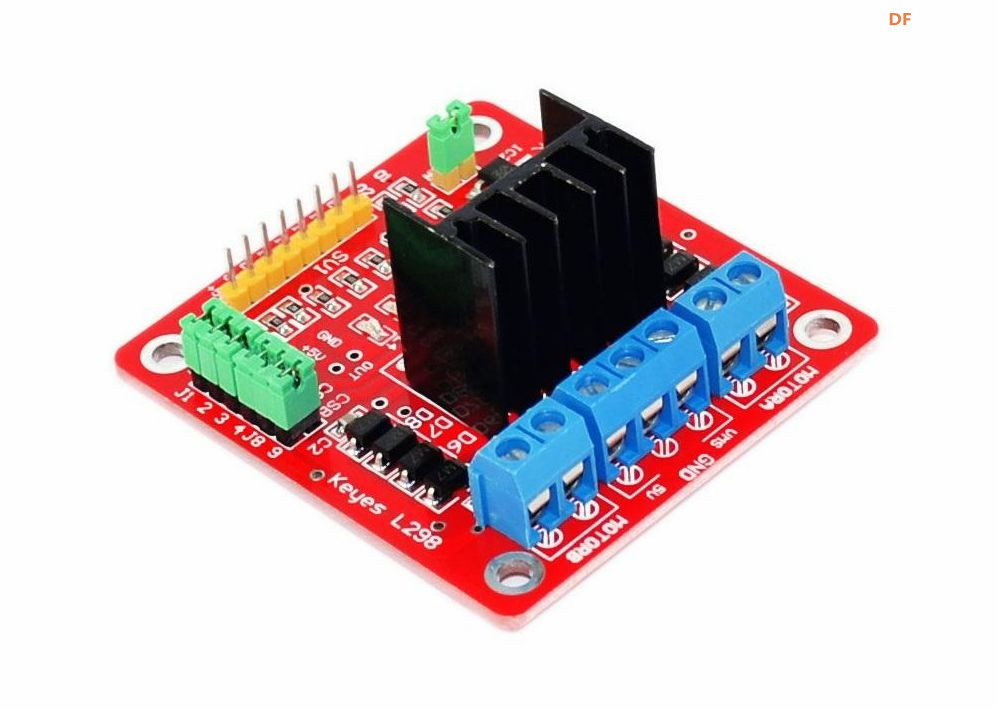 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机 项目实验之一:使用 L298N Arduino 的 NEMA 17 步进电机简单控制 实验开源代码 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十六:正反转PWM调速双H桥L298N模块驱动42步进电机 项目实验之二:使用 L298N控制步进电机正转三圈反转一圈 实验开源代码 |
实验开源代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






