|
15262| 13
|
[建造日志] 搞机心得之摩天轮的诞生 |
萌新第一次发帖还请大佬多罩~ Hi~大家吼,我是Phineas(emmm说了也没人认识)。如果有看过最近铁甲雄心第一集的童鞋应该对那台名叫骑士王的弹射机器人不陌生吧>_< 没错我就是骑士王的制作者,这次应大师之邀来做一个有关格斗机器人的教程,本来说要做有关气动弹射的教程,但弹射这个类型国内格斗机器人元老级人物东哥要做,所以本次我做的是有关竖直旋转机器人的制作教程。说是教程吧,实际上就是自己在制作过程中的一些心得。话不多说,直接进入正题~ 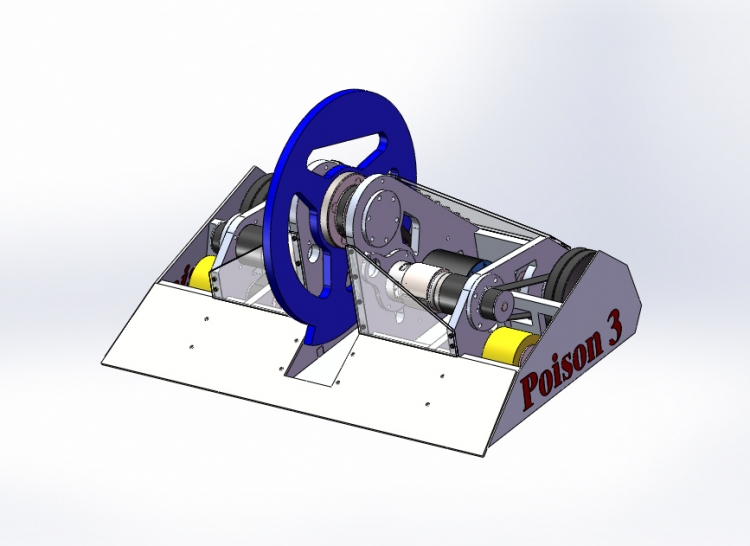 1材料选型 机器人的制作材料有很多,但在制作格斗机器人这种极端环境下工作的机器人的时候,我们确实需要采用一些高强度的材料才能多苟活一阵子。当然使用高强度材料也不是必然,比如作为护甲的时候,一些易损装甲说不定会有奇效。下面就Poison3这台机器人谈谈我喜欢使用的一些材料: 结构我选择的是10mm的6061铝板,6系的铝材强度相当可以,10mm对于羽量级的格斗机器人来说略厚( PS:我重量级110kg的机器人也是10mm)。背部护甲为5mm的PC,在面对非暴力镐斧面前5mmPC足够了。侧面护甲为10mm的HDPE,作为一种易损装甲,HDPE是一种非常不错的材料,当对手比如一台VD从侧面攻击的时候,HDPE会直接撕掉一块,而不是将整车打翻,虽然可能每场都要更换,但确实是一种吸能很有效的装甲。前铲选用的是3mm钛合金TC4,原因是超重了没有办法,钛合金这种东西宁折不弯,而且焊接需要特别高的要求,所以一般情况下选用钢材,只有超重的时候才会考虑。但钛合金的白色火花是超级好看!  2.武器设计 Poison3是一台竖直旋转机器人,经过三代的进化,变成了现在“摩天轮”的样子。摩天轮的设计可以获得最大的武器蓄能效率,但Bite效率可能不如转杆式的设计。设计时根据需要镂空减重,目前通用的有两种设计方法:一是随便画个形状然后找转矩中心,另一种是先确定中心通过不断的配重使转矩中心落在设定的中心上面,这两种方式前一种用的人更多。转轮直径270mm,牙长30mm,转轮厚度10mm,材料为耐磨钢NM450。耐磨钢是一种热处理钢,450是指布式硬度450,不需要热处理,就有很高的硬度,而且焊接特性良好,英国人特别喜欢用耐磨钢焊接单体壳结构。转轮通过一台6374驱动,标称功率3kw,没有实测过。传动使用O型三角带,传动比1:1,最高可以达到6000rpm左右,但3000rpm以上就有很大的陀螺仪效应。故在实战中大概开到4000转左右。在这里要突出说明一下VD轴承的选择,在这里我选用的是石墨自润滑轴承,比起滚珠和滚子轴承,石墨自润滑轴承更加结实耐用,虽然可能会发热,但实测发热并不严重。  3.行走系统 Poison的行走系统为典型的“一带二”布局,即一台电机通过传动带动两个轮子转动,电机为普通775电机,采用减速比为1:20的行星减速箱。皮带为HTD3M,传动为活轴结构。电机的位置比较作死,在武器轴两边,前轮直径60,后轮直径100,通过同步轮减速实现同速。对于行走系统,我个人认为稳定是第一位,所以一定要选用性能匹配的电机和电调,目前市面上的电调普遍没有做限流保护,所以超负荷的状态下只能自求多福了。。。 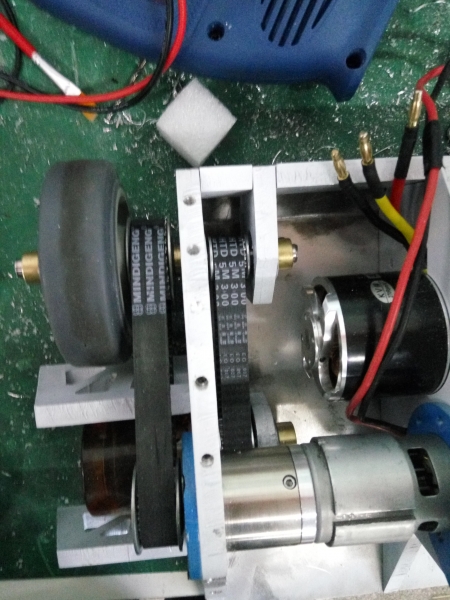 传动结构 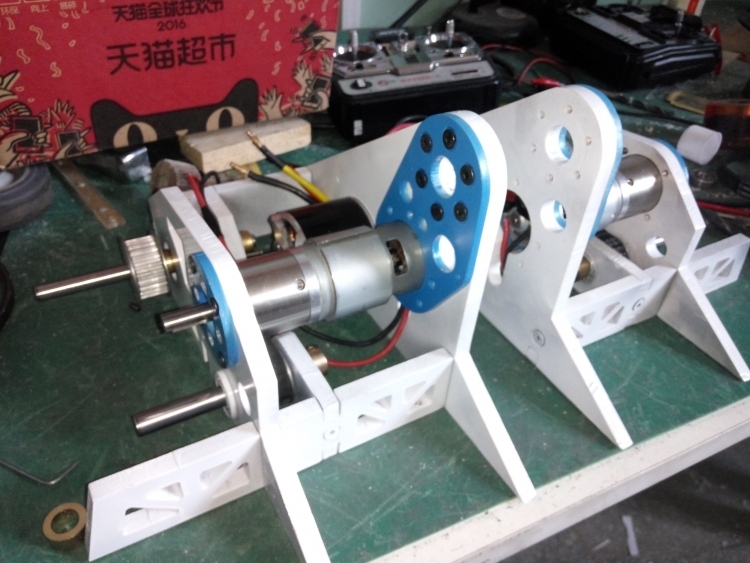 电机排布 4.测试与调整 单牙VD最重要的一个指标就是动平衡,稍微的颤抖实际上影响不大,但如果像打桩机似的就该考虑重新设计转轮了。在测试转轮的过程中,我发现了不同转速下转轮的抖动情况不同,大概3000转的时候开始抖,4000左右抖动减得很小,更高的转速下又开始抖。。。后来在今年一个专业课考试里找到了理论基础 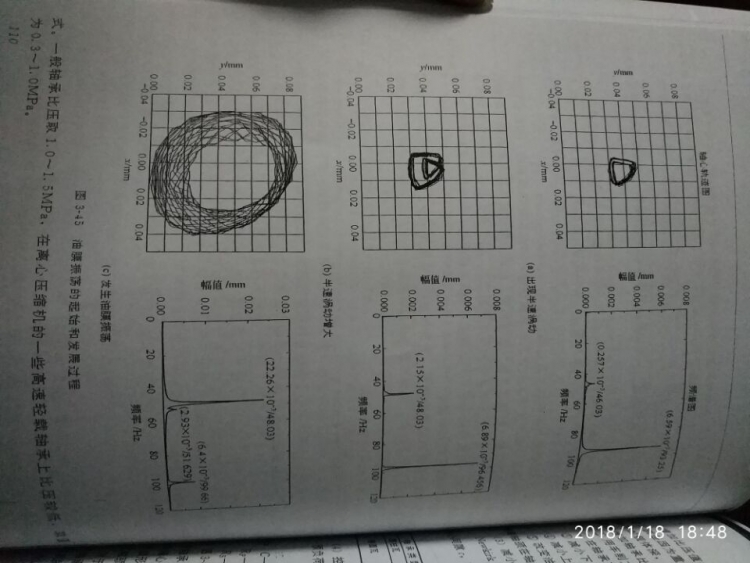 (设备与故障诊断) 实际上小的抖动基本不影响操作,但时间长了导致螺丝震松,比如我固定主轴电机的螺丝每场都要重新紧一下(点胶了就没法换了)。竖直旋转机器人作为一种攻防兼备的类型值得新手一做,结构简单,操作灵活,只要碰上就有输出。但是要考虑到翻身问题,7成的VD都是死于无法翻身,一台可以随时攻击与翻身的VD真的挺可怕的。  制作及比赛剪辑: 先发出来慢慢改~ |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶